
一种基于多帧输入与轨迹平滑的多目标跟踪方法和装置.pdf

是飞****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于多帧输入与轨迹平滑的多目标跟踪方法和装置.pdf
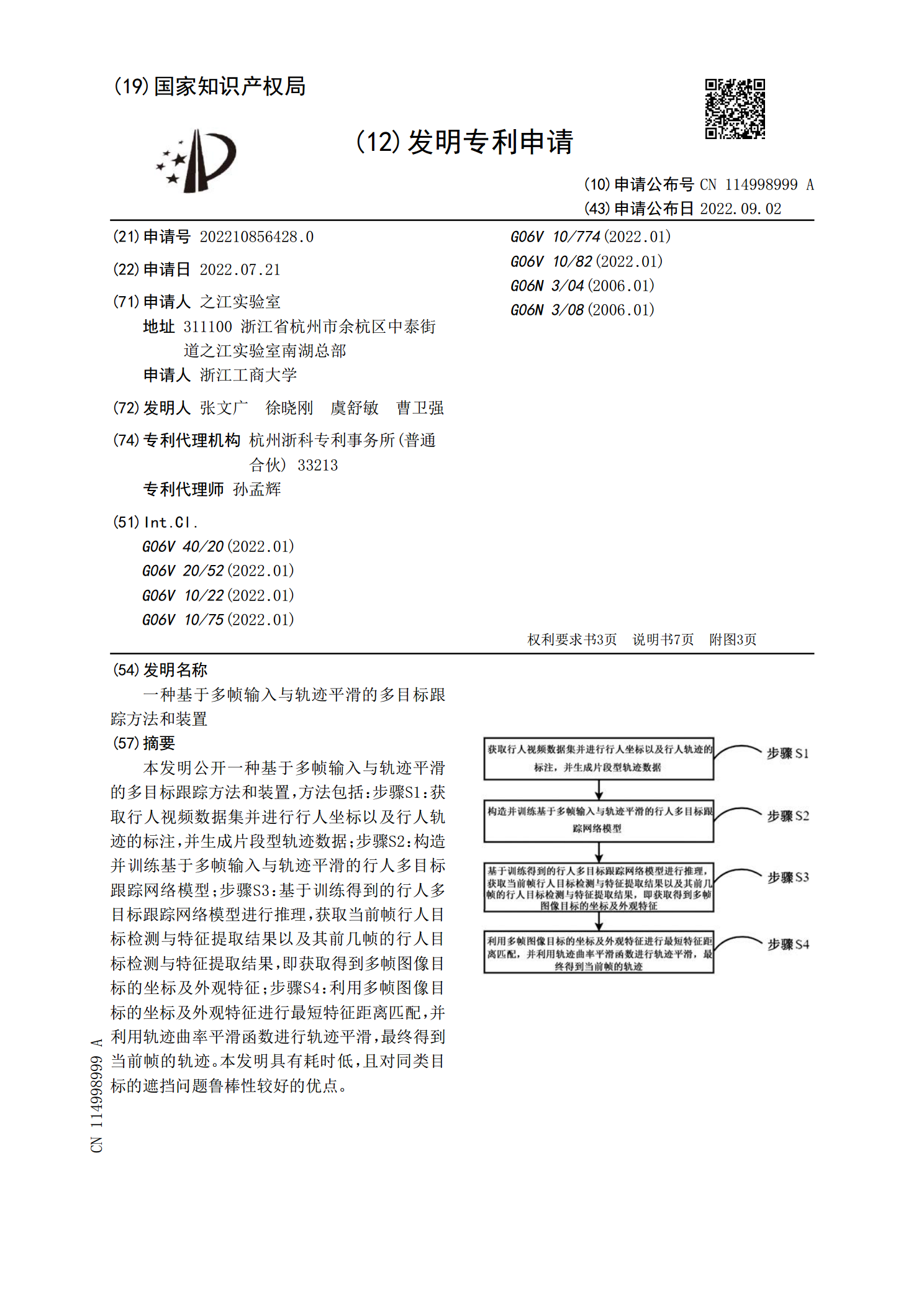
本发明公开一种基于多帧输入与轨迹平滑的多目标跟踪方法和装置,方法包括:步骤S1:获取行人视频数据集并进行行人坐标以及行人轨迹的标注,并生成片段型轨迹数据;步骤S2:构造并训练基于多帧输入与轨迹平滑的行人多目标跟踪网络模型;步骤S3:基于训练得到的行人多目标跟踪网络模型进行推理,获取当前帧行人目标检测与特征提取结果以及其前几帧的行人目标检测与特征提取结果,即获取得到多帧图像目标的坐标及外观特征;步骤S4:利用多帧图像目标的坐标及外观特征进行最短特征距离匹配,并利用轨迹曲率平滑函数进行轨迹平滑,最终得到当前帧

多目标跟踪的多伯努利平滑方法.docx
多目标跟踪的多伯努利平滑方法多目标跟踪是指在动态场景下,通过多个传感器获取的目标信息进行目标的检测、跟踪和识别,实现对多个目标的同时跟踪和定位。在自动驾驶、安防监控、航空航天等领域中具有广泛的应用。多伯努利平滑(MultipleBernoulliFilter,MBF)是一种在多目标跟踪任务中常用的滤波算法,其基本思想是利用目标生成模型对每个目标进行分别跟踪和识别。在目标跟踪任务中,MBF算法可以通过对目标轨迹的生成模型进行建模,并且利用伯努利过程描述目标状态、出现和消失的概率,从而实现对多个目标的跟踪和识
一种基于轨迹置信度的多目标跟踪方法.pdf
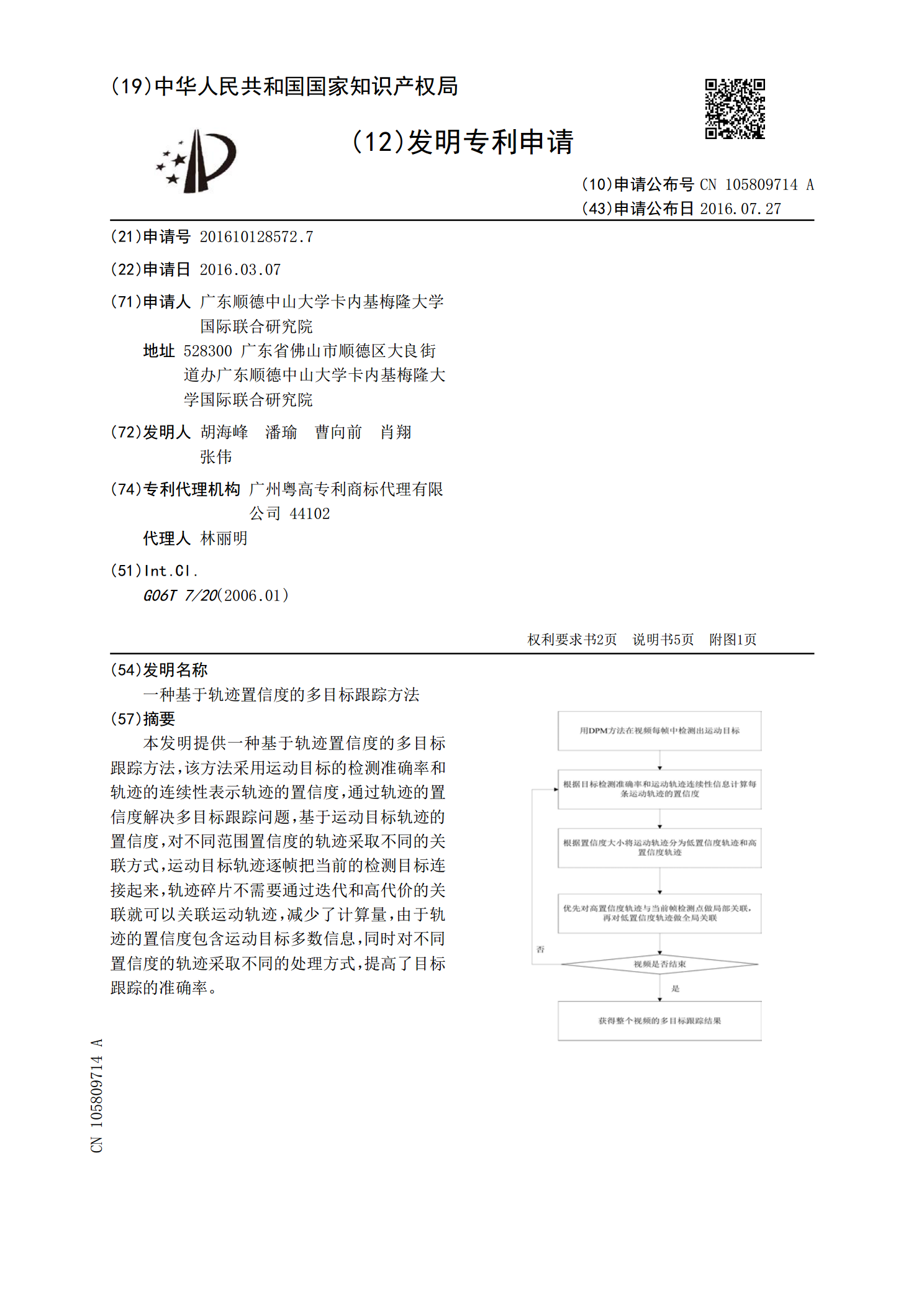
本发明提供一种基于轨迹置信度的多目标跟踪方法,该方法采用运动目标的检测准确率和轨迹的连续性表示轨迹的置信度,通过轨迹的置信度解决多目标跟踪问题,基于运动目标轨迹的置信度,对不同范围置信度的轨迹采取不同的关联方式,运动目标轨迹逐帧把当前的检测目标连接起来,轨迹碎片不需要通过迭代和高代价的关联就可以关联运动轨迹,减少了计算量,由于轨迹的置信度包含运动目标多数信息,同时对不同置信度的轨迹采取不同的处理方式,提高了目标跟踪的准确率。

卫星定位轨迹的平滑化方法和装置.pdf
本发明提供了一种卫星定位轨迹的平滑化方法和装置,其中,该方法包括以下步骤:建立目标处理模型;根据目标处理模型对待处理轨迹的坐标序列进行处理,以获取待处理轨迹上各坐标的移除概率;通过二分类模型根据移除概率对待处理轨迹进行平滑化处理。根据本发明的卫星定位轨迹的平滑化方法,基于机器学习并且以大数据为依托,能够准确有效地去除卫星定位轨迹中的噪声点和冗余点,并且无法采用繁琐的计算公式,方法较为简单。

基于多帧图像的图像处理方法和装置.pdf
本申请提出一种基于多帧图像的图像处理方法和装置,其中,方法包括:获取多帧原始图像,并根据多帧原始图像,合成得到高动态范围图像然后,根据图像纹理信息的不同,将高动态范围图像划分为不同的纹理区域,并采用不同的神经网络模型分别对高动态范围图像中不同纹理区域进行降噪处理,以得到降噪后的高动态范围图像。由此,通过对高动态范围图像中的不同纹理区域分别进行降噪处理,解决了夜景拍摄时,拍摄的图像噪声水平高,影响用户体验的技术问题,实现了对不同纹理区域进行针对性降噪,提高了降噪的有效性,使得降噪得到的高动态范围图像在降低画