
智能驾驶ADAS测试场景自动化生成方法及系统.pdf

努力****南绿

1/10
2/10

3/10
4/10

5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
智能驾驶ADAS测试场景自动化生成方法及系统.pdf
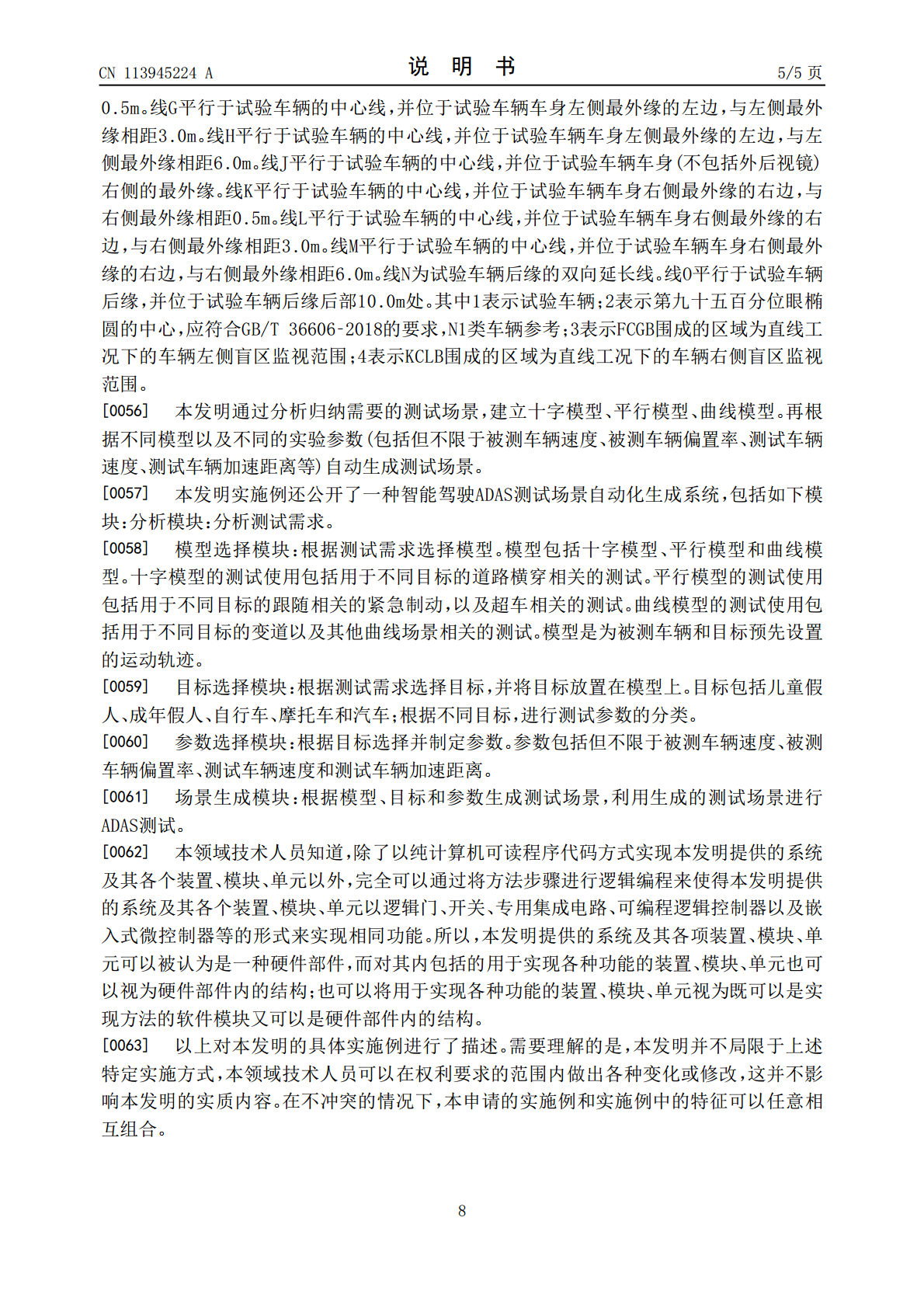
本发明提供了一种智能驾驶ADAS测试场景自动化生成方法及系统,包括如下步骤:分析步骤:分析测试需求;模型选择步骤:根据测试需求选择模型;目标选择步骤:根据测试需求选择目标,并将目标放置在模型上;参数选择步骤:根据目标选择并制定参数;场景生成步骤:根据模型、目标和参数生成测试场景。本发明工作人员增进对ADAS测试规范了解从而提高实际测试效率。

基于智能驾驶及ADAS模拟的车辆底盘测试系统和方法.pdf
本发明公开了一种基于智能驾驶及ADAS模拟的车辆底盘测试系统及方法,包括:场景交互数据预处理模块,其接收测试车辆决策系统控制车辆的底盘执行系统作出运动响应的控制命令获得测试车辆运动信息,将测试车辆运动信息与设定好的场景进行融合处理获得相对运动目标物运动信息,将相对运动目标物运动信息发送到场景模拟装置;场景模拟装置,其根据相对运动目标物运动信息对测试场景进行实时模拟控制;路况模拟控制模块,其接收场景交互数据预处理模块发送的测试车辆运动信息和测试需求形成路况模拟控制命令;路况模拟模块,其根据路况模拟控制命令执
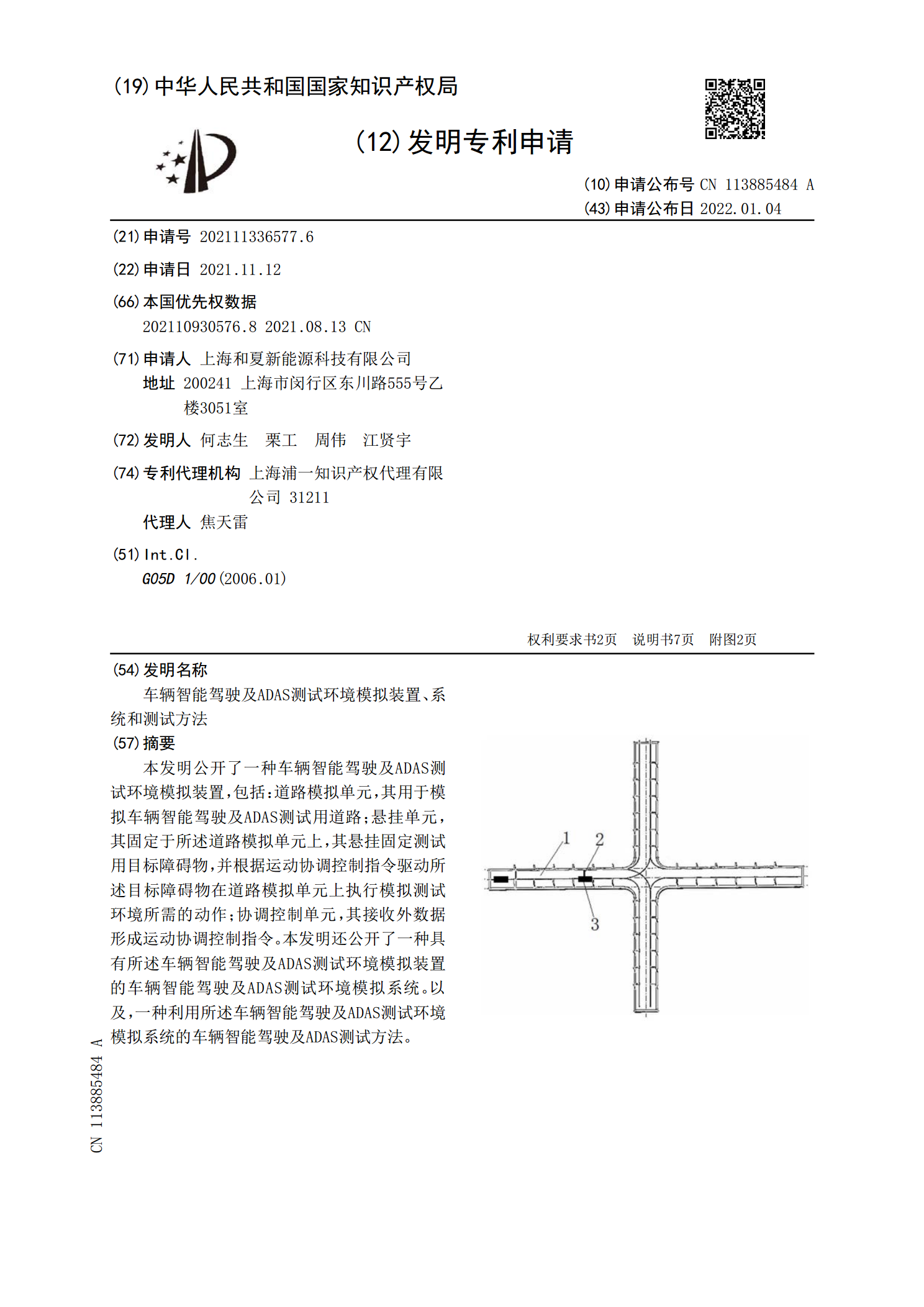
车辆智能驾驶及ADAS测试环境模拟装置、系统和测试方法.pdf
本发明公开了一种车辆智能驾驶及ADAS测试环境模拟装置,包括:道路模拟单元,其用于模拟车辆智能驾驶及ADAS测试用道路;悬挂单元,其固定于所述道路模拟单元上,其悬挂固定测试用目标障碍物,并根据运动协调控制指令驱动所述目标障碍物在道路模拟单元上执行模拟测试环境所需的动作;协调控制单元,其接收外数据形成运动协调控制指令。本发明还公开了一种具有所述车辆智能驾驶及ADAS测试环境模拟装置的车辆智能驾驶及ADAS测试环境模拟系统。以及,一种利用所述车辆智能驾驶及ADAS测试环境模拟系统的车辆智能驾驶及ADAS测试方

ADAS智能驾驶测试服务解决方案.docx
ADAS智能驾驶测试服务智能化是汽车技术发展的重要方向,智能驾驶技术是汽车进化的必由之路。作为国内领先的汽车电子系统供应商,恒润科技在汽车智能驾驶技术方面也推出了测试咨询业务。智能驾驶系统完整测试服务解决方案,覆盖了智能驾驶法规标准、基本逻辑、协调控制以及复杂场景的测试验证,测试方式包括仿真自动化测试以及实车测试。1.智能驾驶测试设计•智能驾驶测试面临的挑战,如何在有限时间内提升测试覆盖度•智能驾驶测试场景库的建立原则、测试用例和评判标准的设计方法2.智能驾驶测试实施•智不同测试环境的实施方法和测试重点•
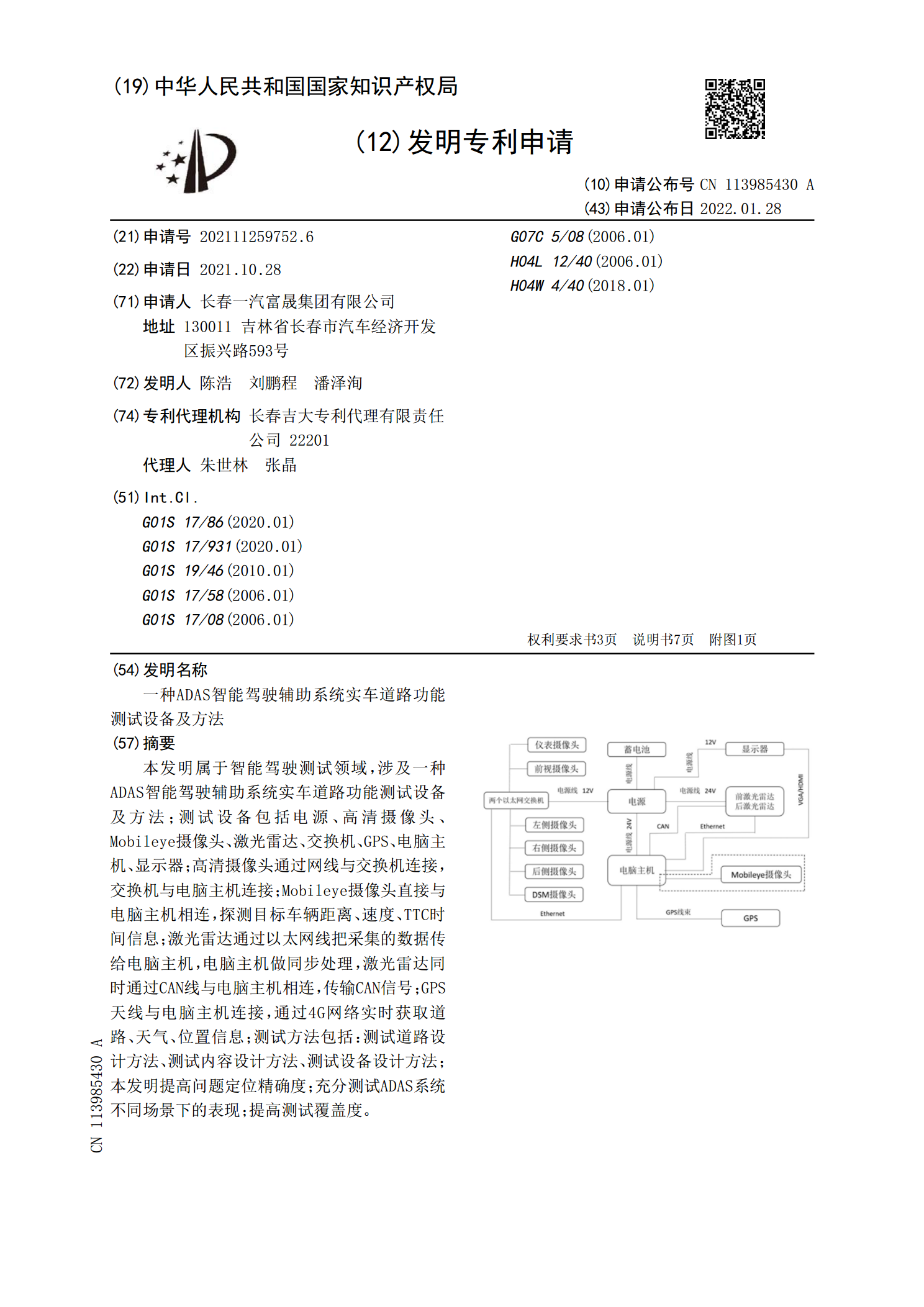
一种ADAS智能驾驶辅助系统实车道路功能测试设备及方法.pdf
本发明属于智能驾驶测试领域,涉及一种ADAS智能驾驶辅助系统实车道路功能测试设备及方法;测试设备包括电源、高清摄像头、Mobileye摄像头、激光雷达、交换机、GPS、电脑主机、显示器;高清摄像头通过网线与交换机连接,交换机与电脑主机连接;Mobileye摄像头直接与电脑主机相连,探测目标车辆距离、速度、TTC时间信息;激光雷达通过以太网线把采集的数据传给电脑主机,电脑主机做同步处理,激光雷达同时通过CAN线与电脑主机相连,传输CAN信号;GPS天线与电脑主机连接,通过4G网络实时获取道路、天气、位置信息