
一种基于视觉识别的巡线机器人自主充电方法、系统.pdf

一条****杉淑


1/10

2/10

3/10

4/10
5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于视觉识别的巡线机器人自主充电方法、系统.pdf
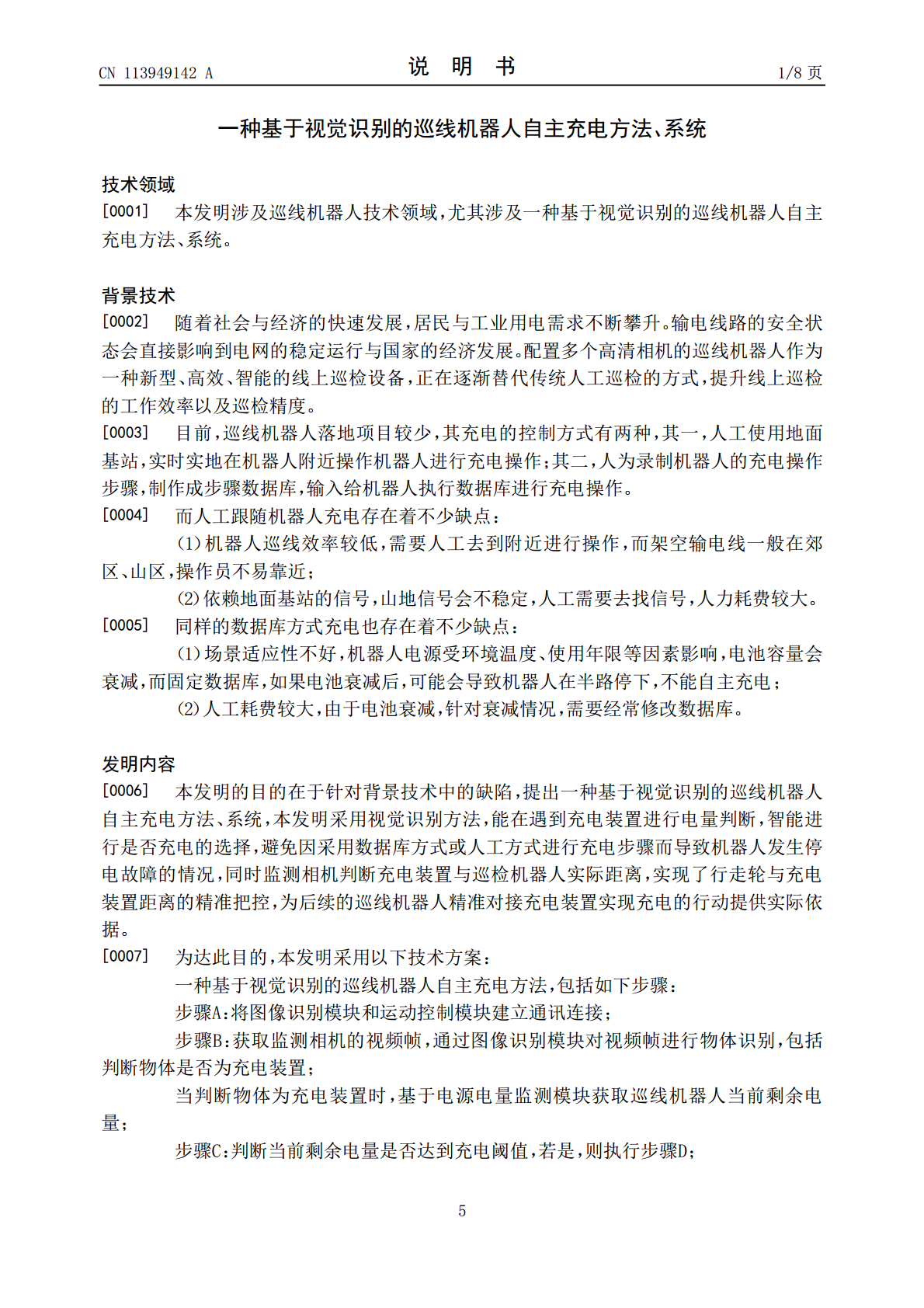
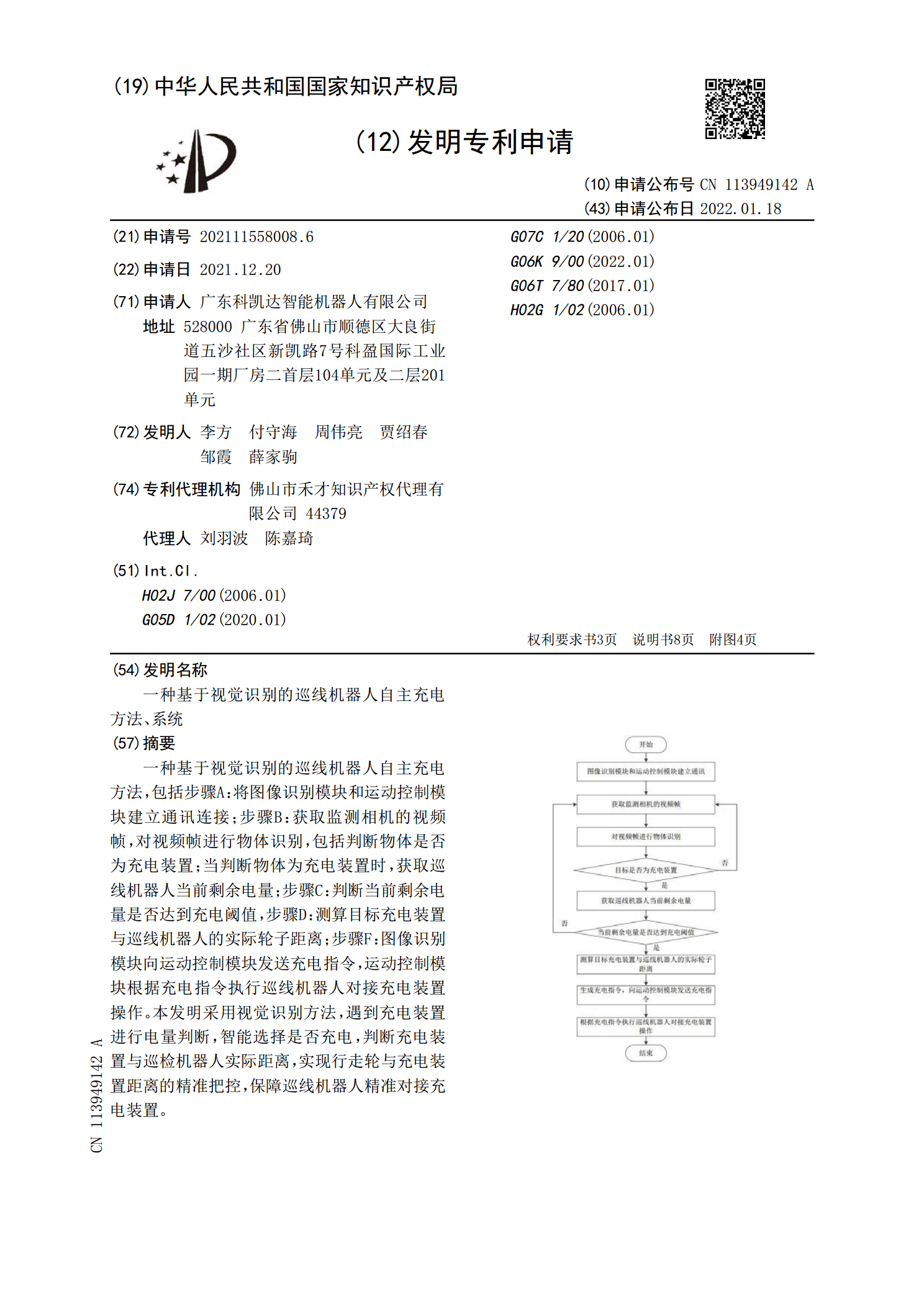
一种基于视觉识别的巡线机器人自主充电方法,包括步骤A:将图像识别模块和运动控制模块建立通讯连接;步骤B:获取监测相机的视频帧,对视频帧进行物体识别,包括判断物体是否为充电装置;当判断物体为充电装置时,获取巡线机器人当前剩余电量;步骤C:判断当前剩余电量是否达到充电阈值,步骤D:测算目标充电装置与巡线机器人的实际轮子距离;步骤F:图像识别模块向运动控制模块发送充电指令,运动控制模块根据充电指令执行巡线机器人对接充电装置操作。本发明采用视觉识别方法,遇到充电装置进行电量判断,智能选择是否充电,判断充电装置与巡

基于视觉感知的巡线机器人系统.pptx
汇报人:目录PARTONEPARTTWO定义和功能系统的组成和原理巡线机器人的应用场景PARTTHREE视觉感知技术的原理和优势视觉感知在巡线机器人中的实现方式视觉感知在巡线机器人中的关键技术PARTFOUR系统硬件设计系统软件设计机器人的控制策略和算法系统调试和优化PARTFIVE性能评估标准和测试方法实验结果和分析系统性能的优缺点和改进方向PARTSIX在工业自动化领域的应用前景在智能交通领域的应用前景技术发展趋势和未来展望THANKYOU

一种巡线机器人新型充电方法.pdf
本发明公开了一种巡线机器人新型充电方法,具体涉及巡线机器人领域,包括机器人本体和越障机构,所述机器人本体包括第一机械臂和第二机械臂,所述第一机械臂和第二机械臂底部设有一个丝杆机构,所述第一机械臂和第二机械臂顶部均固定设有张紧轮架,所述张紧轮架顶部固定设有驱动机构以及底部固定设有电动缸,所述张紧轮架两侧设有接电电极和感应器,所述驱动机构包括上驱动轮和下张紧轮,所述上驱动轮和下张紧轮之间设有限位间隙。本发明在利用第一机械臂和第二机械臂分别带动两侧的两个接电电极与充电锤接触进行充电时,两个接电电极之间的间距大于

一种巡线机器人的视觉识别方法和系统.pdf
一种巡线机器人的视觉识别方法,包括:步骤A:确定巡线机器人前进方向,将图像识别模块和运动控制模块建立通讯连接;步骤B:获取导航相机的视频帧,通过图像识别模块的导航相机识别子模块对视频帧进行物体识别,包括判断物体是否为金具及测算物体与导航相机的距离;当判断物体为金具时,判断金具与导航相机的距离是否低于预设距离,若是,判定巡线机器人进入过桥状态,执行步骤C;步骤C:获取监测相机的视频帧,通过图像识别模块的监测相机识别子模块再次进行物体识别,包括测算目标金具与巡线机器人的实际轮子距离,并执行步骤D;步骤D:所述
一种基于视觉注意机制的高压巡线故障检测方法及系统.pdf
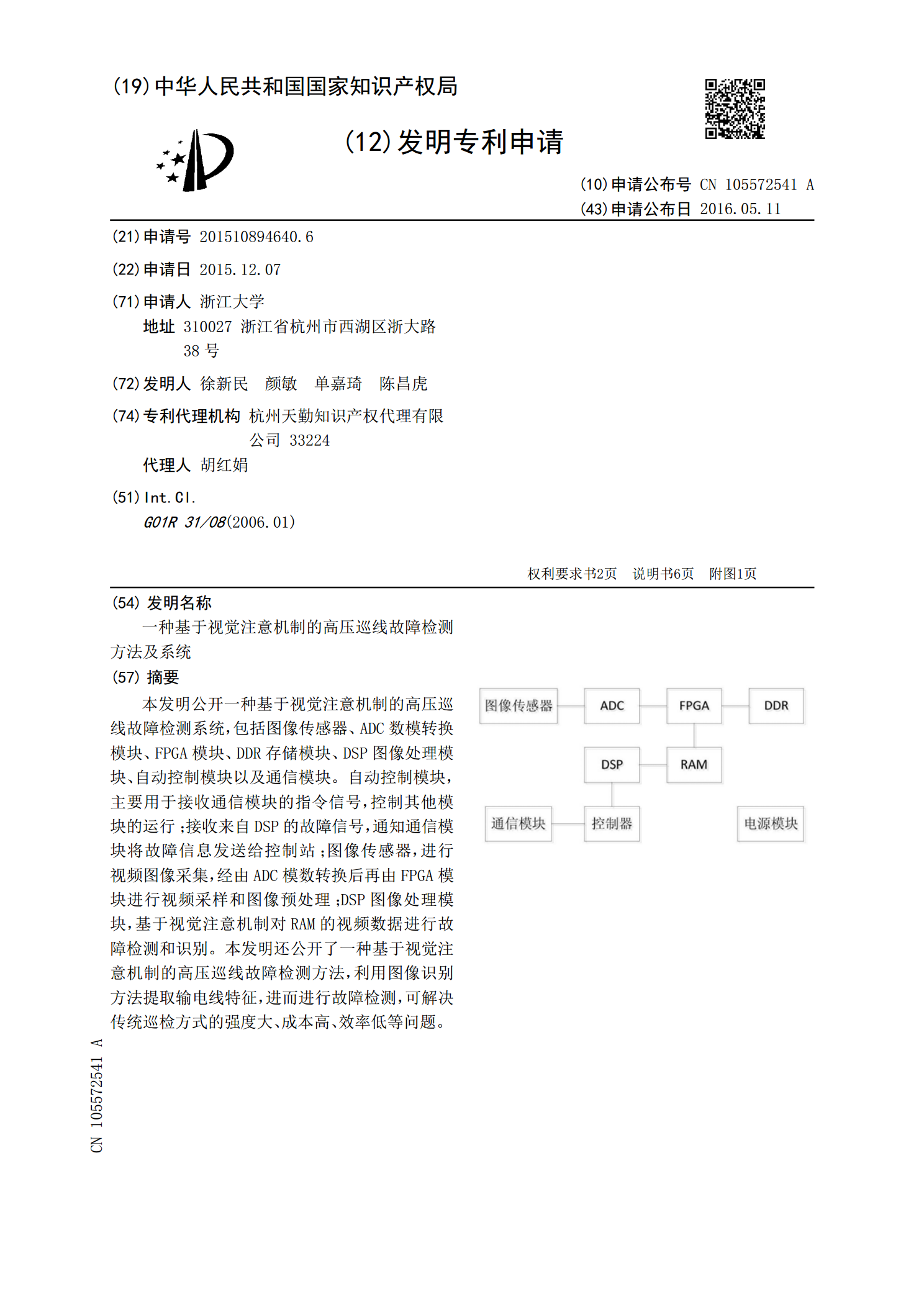
本发明公开一种基于视觉注意机制的高压巡线故障检测系统,包括图像传感器、ADC数模转换模块、FPGA模块、DDR存储模块、DSP图像处理模块、自动控制模块以及通信模块。自动控制模块,主要用于接收通信模块的指令信号,控制其他模块的运行;接收来自DSP的故障信号,通知通信模块将故障信息发送给控制站;图像传感器,进行视频图像采集,经由ADC模数转换后再由FPGA模块进行视频采样和图像预处理;DSP图像处理模块,基于视觉注意机制对RAM的视频数据进行故障检测和识别。本发明还公开了一种基于视觉注意机制的高压巡线故障检