
一种基于视觉注意机制的高压巡线故障检测方法及系统.pdf

桂香****盟主

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于视觉注意机制的高压巡线故障检测方法及系统.pdf
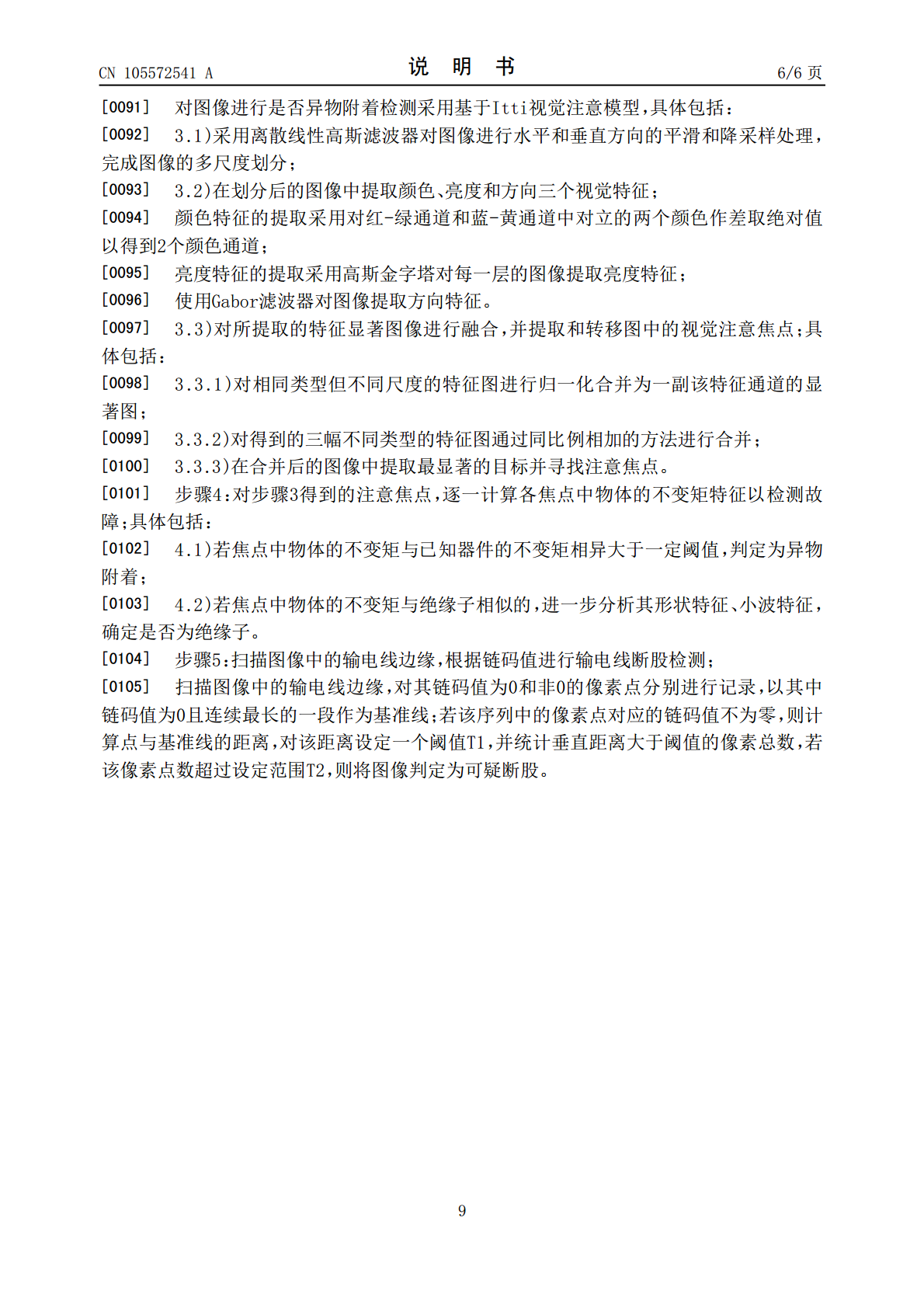
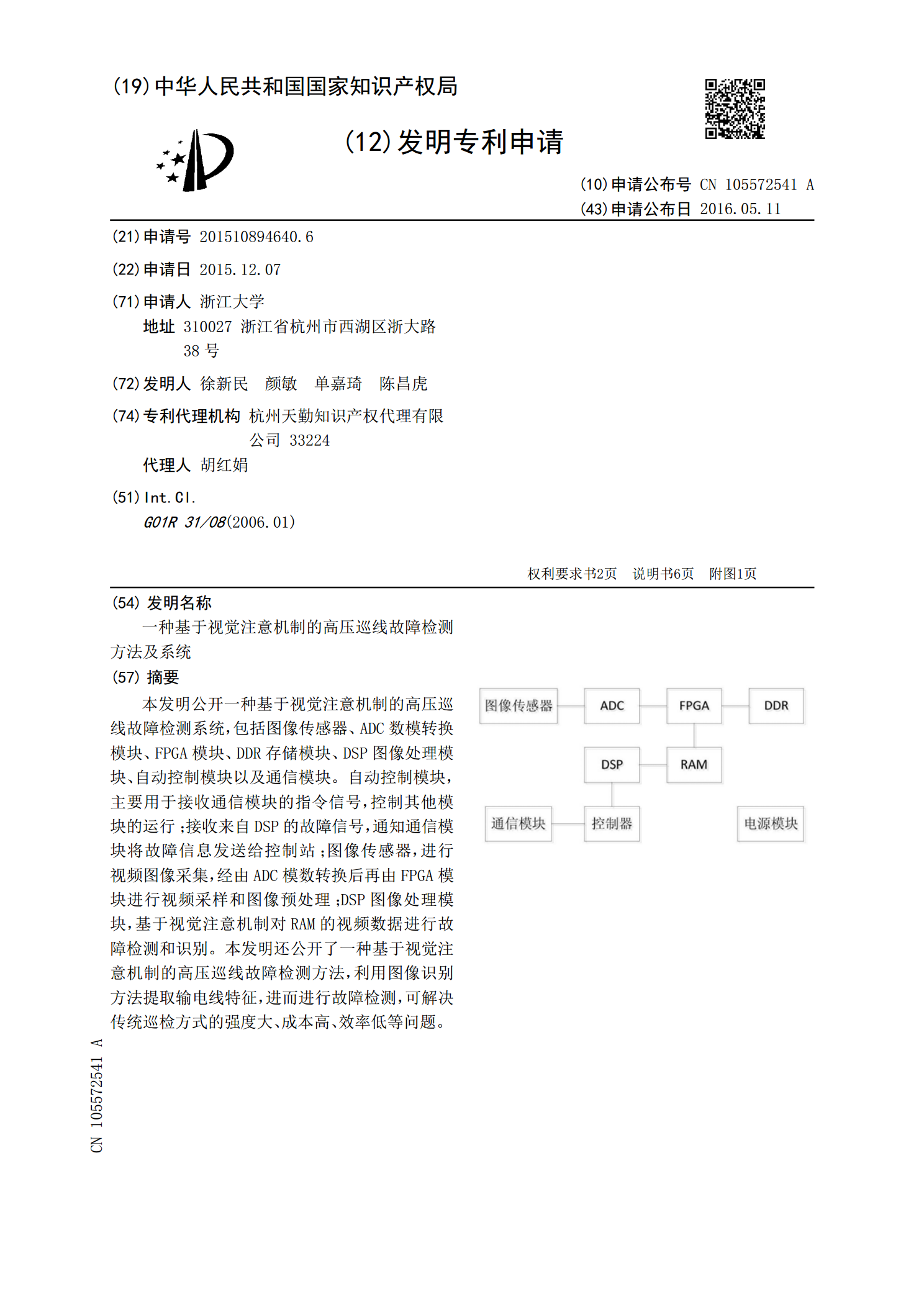
本发明公开一种基于视觉注意机制的高压巡线故障检测系统,包括图像传感器、ADC数模转换模块、FPGA模块、DDR存储模块、DSP图像处理模块、自动控制模块以及通信模块。自动控制模块,主要用于接收通信模块的指令信号,控制其他模块的运行;接收来自DSP的故障信号,通知通信模块将故障信息发送给控制站;图像传感器,进行视频图像采集,经由ADC模数转换后再由FPGA模块进行视频采样和图像预处理;DSP图像处理模块,基于视觉注意机制对RAM的视频数据进行故障检测和识别。本发明还公开了一种基于视觉注意机制的高压巡线故障检
一种基于改进视觉注意机制的磁片瑕疵检测方法.pdf
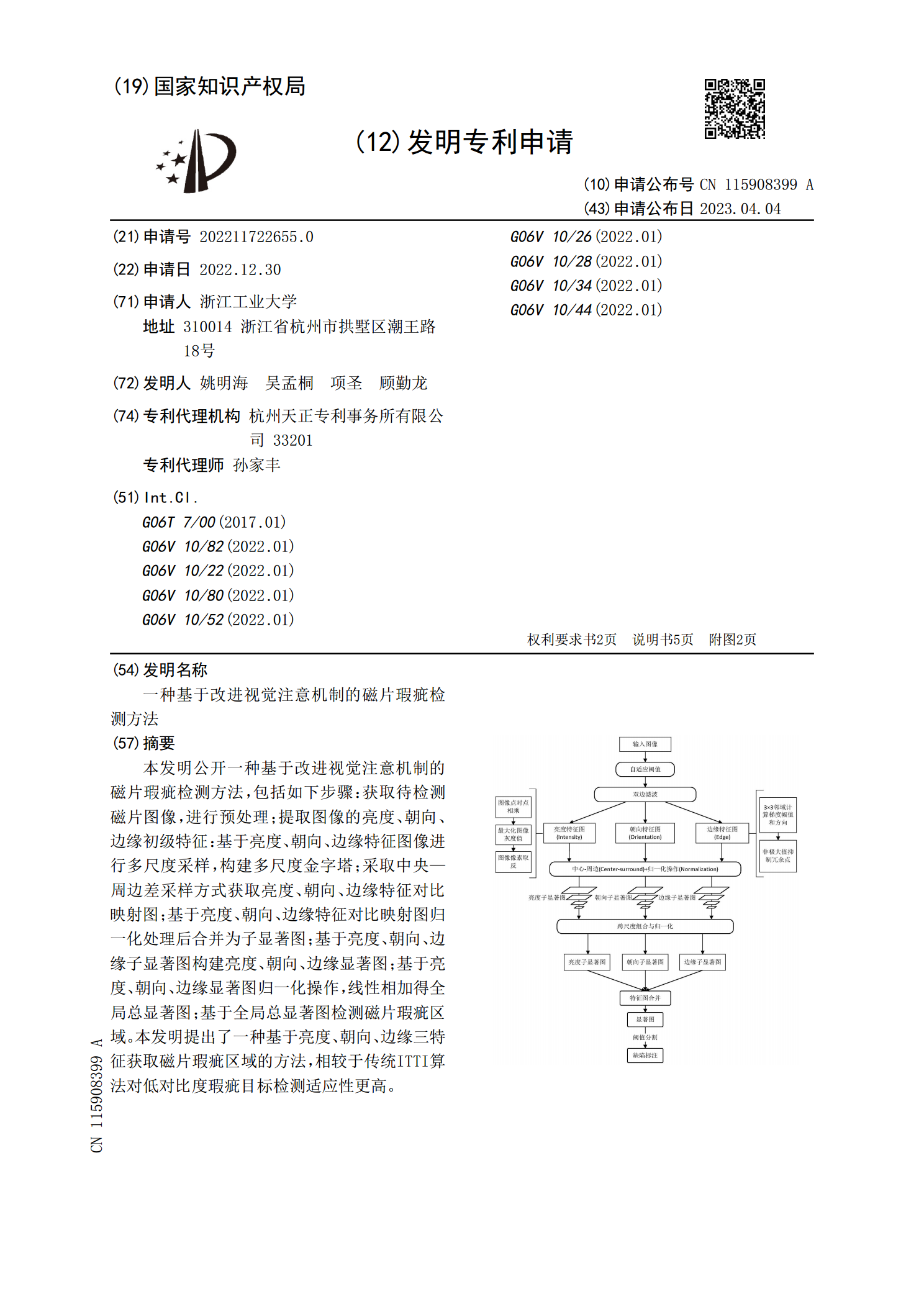
本发明公开一种基于改进视觉注意机制的磁片瑕疵检测方法,包括如下步骤:获取待检测磁片图像,进行预处理;提取图像的亮度、朝向、边缘初级特征:基于亮度、朝向、边缘特征图像进行多尺度采样,构建多尺度金字塔;采取中央—周边差采样方式获取亮度、朝向、边缘特征对比映射图;基于亮度、朝向、边缘特征对比映射图归一化处理后合并为子显著图;基于亮度、朝向、边缘子显著图构建亮度、朝向、边缘显著图;基于亮度、朝向、边缘显著图归一化操作,线性相加得全局总显著图;基于全局总显著图检测磁片瑕疵区域。本发明提出了一种基于亮度、朝向、边缘三
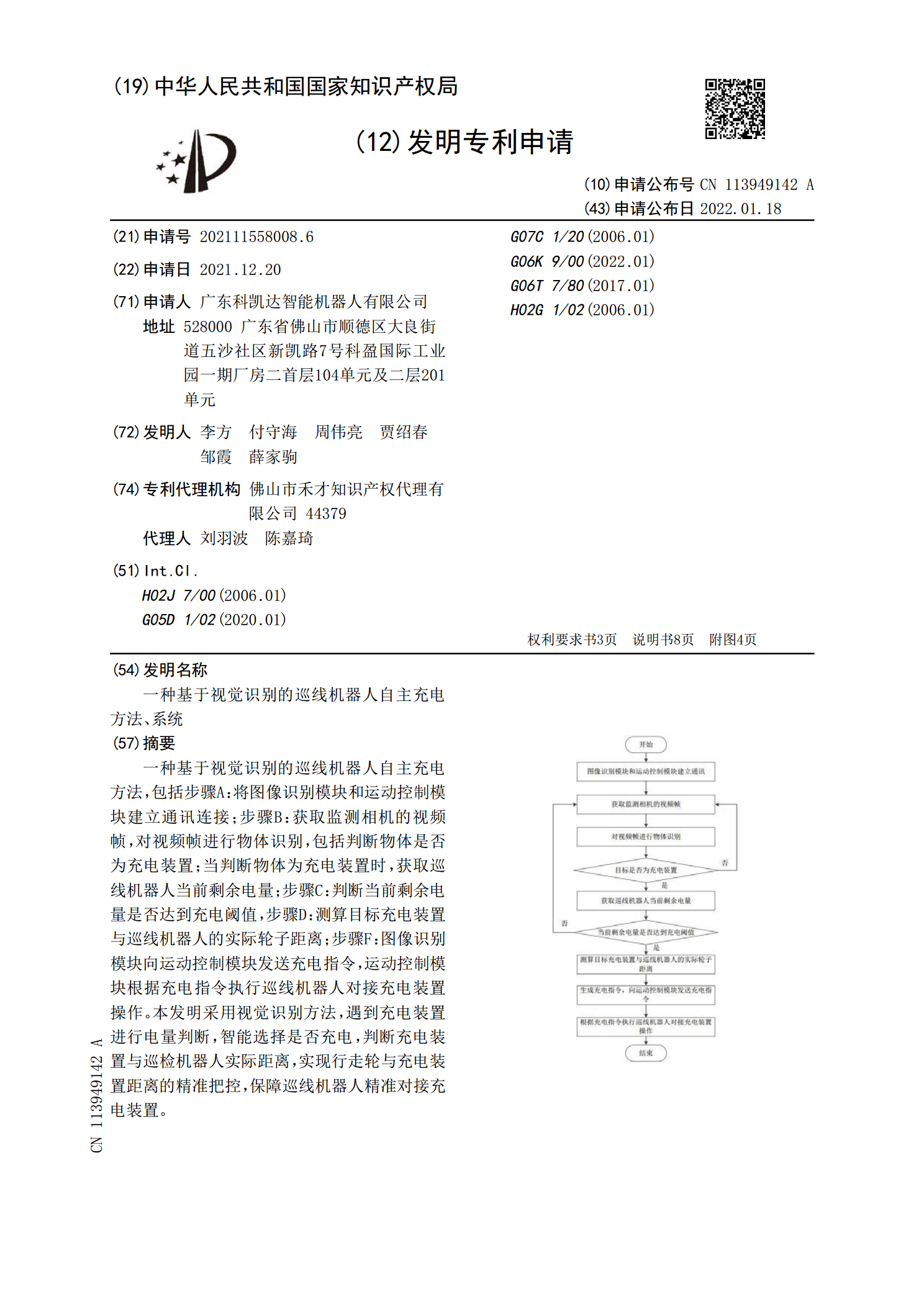
一种基于视觉识别的巡线机器人自主充电方法、系统.pdf
一种基于视觉识别的巡线机器人自主充电方法,包括步骤A:将图像识别模块和运动控制模块建立通讯连接;步骤B:获取监测相机的视频帧,对视频帧进行物体识别,包括判断物体是否为充电装置;当判断物体为充电装置时,获取巡线机器人当前剩余电量;步骤C:判断当前剩余电量是否达到充电阈值,步骤D:测算目标充电装置与巡线机器人的实际轮子距离;步骤F:图像识别模块向运动控制模块发送充电指令,运动控制模块根据充电指令执行巡线机器人对接充电装置操作。本发明采用视觉识别方法,遇到充电装置进行电量判断,智能选择是否充电,判断充电装置与巡
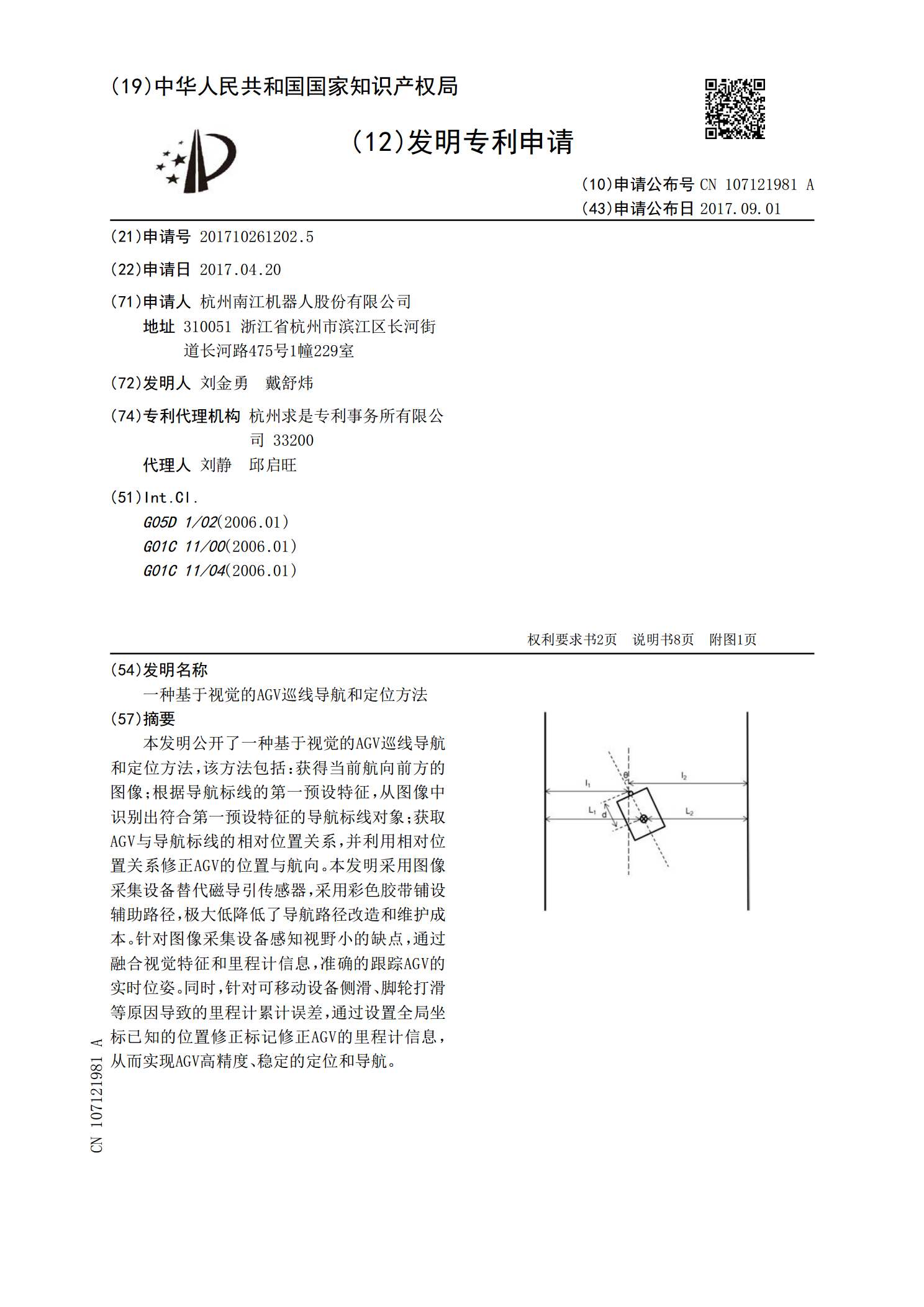
一种基于视觉的AGV巡线导航和定位方法.pdf
本发明公开了一种基于视觉的AGV巡线导航和定位方法,该方法包括:获得当前航向前方的图像;根据导航标线的第一预设特征,从图像中识别出符合第一预设特征的导航标线对象;获取AGV与导航标线的相对位置关系,并利用相对位置关系修正AGV的位置与航向。本发明采用图像采集设备替代磁导引传感器,采用彩色胶带铺设辅助路径,极大低降低了导航路径改造和维护成本。针对图像采集设备感知视野小的缺点,通过融合视觉特征和里程计信息,准确的跟踪AGV的实时位姿。同时,针对可移动设备侧滑、脚轮打滑等原因导致的里程计累计误差,通过设置全局坐
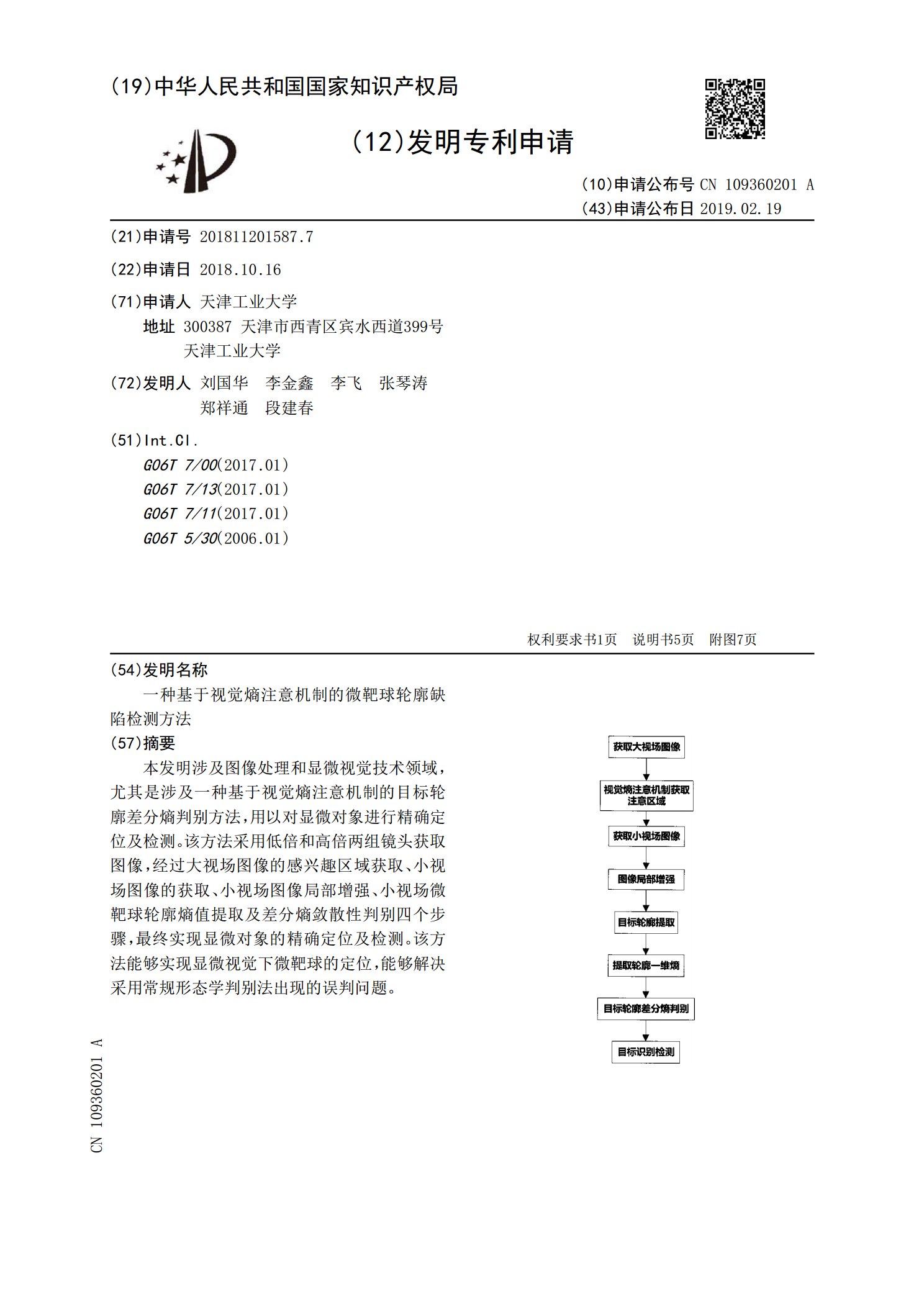
一种基于视觉熵注意机制的微靶球轮廓缺陷检测方法.pdf
本发明涉及图像处理和显微视觉技术领域,尤其是涉及一种基于视觉熵注意机制的目标轮廓差分熵判别方法,用以对显微对象进行精确定位及检测。该方法采用低倍和高倍两组镜头获取图像,经过大视场图像的感兴趣区域获取、小视场图像的获取、小视场图像局部增强、小视场微靶球轮廓熵值提取及差分熵敛散性判别四个步骤,最终实现显微对象的精确定位及检测。该方法能够实现显微视觉下微靶球的定位,能够解决采用常规形态学判别法出现的误判问题。