
一种巡线机器人新型充电方法.pdf

Jo****34

1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种巡线机器人新型充电方法.pdf
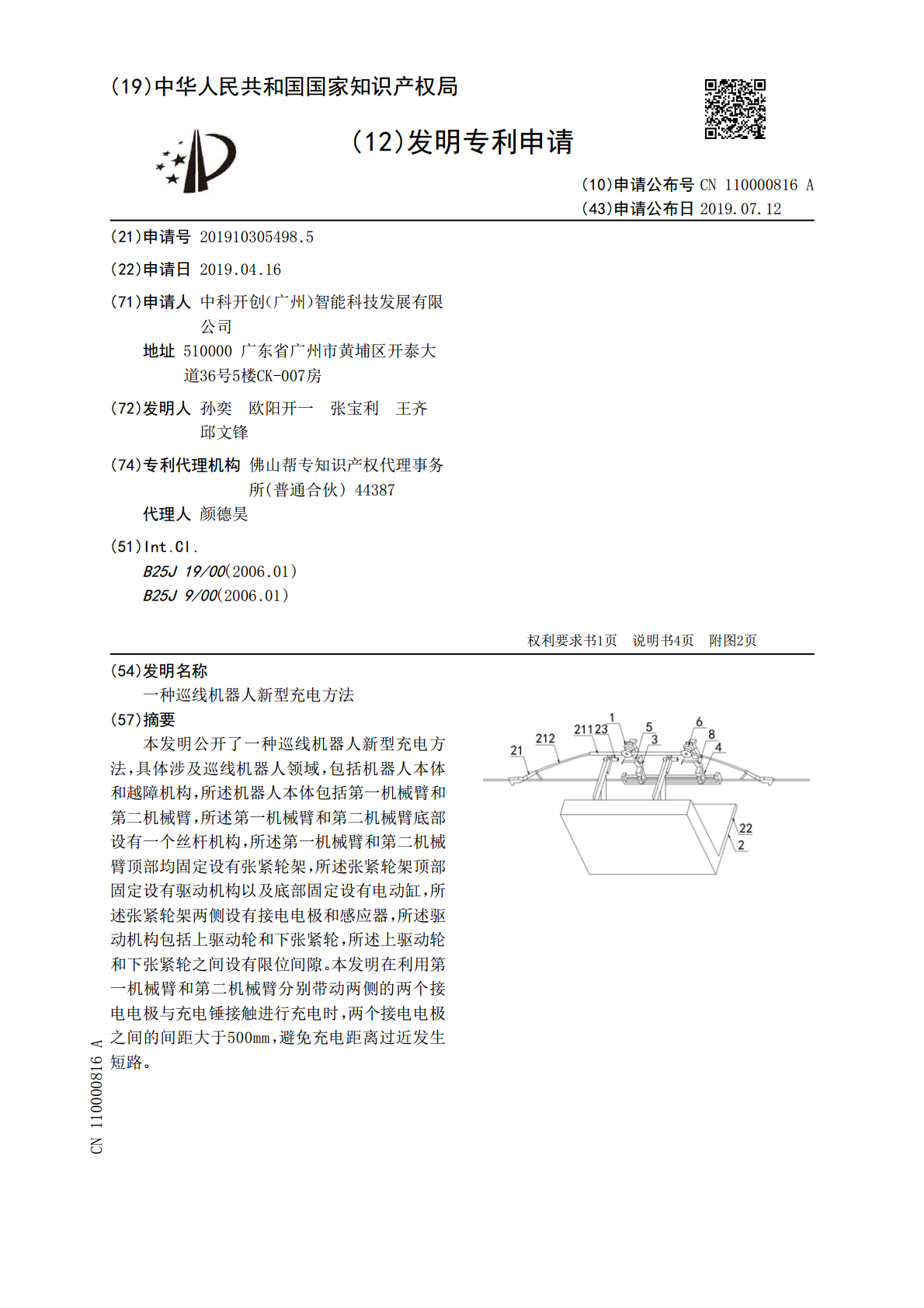
本发明公开了一种巡线机器人新型充电方法,具体涉及巡线机器人领域,包括机器人本体和越障机构,所述机器人本体包括第一机械臂和第二机械臂,所述第一机械臂和第二机械臂底部设有一个丝杆机构,所述第一机械臂和第二机械臂顶部均固定设有张紧轮架,所述张紧轮架顶部固定设有驱动机构以及底部固定设有电动缸,所述张紧轮架两侧设有接电电极和感应器,所述驱动机构包括上驱动轮和下张紧轮,所述上驱动轮和下张紧轮之间设有限位间隙。本发明在利用第一机械臂和第二机械臂分别带动两侧的两个接电电极与充电锤接触进行充电时,两个接电电极之间的间距大于
一种基于视觉识别的巡线机器人自主充电方法、系统.pdf
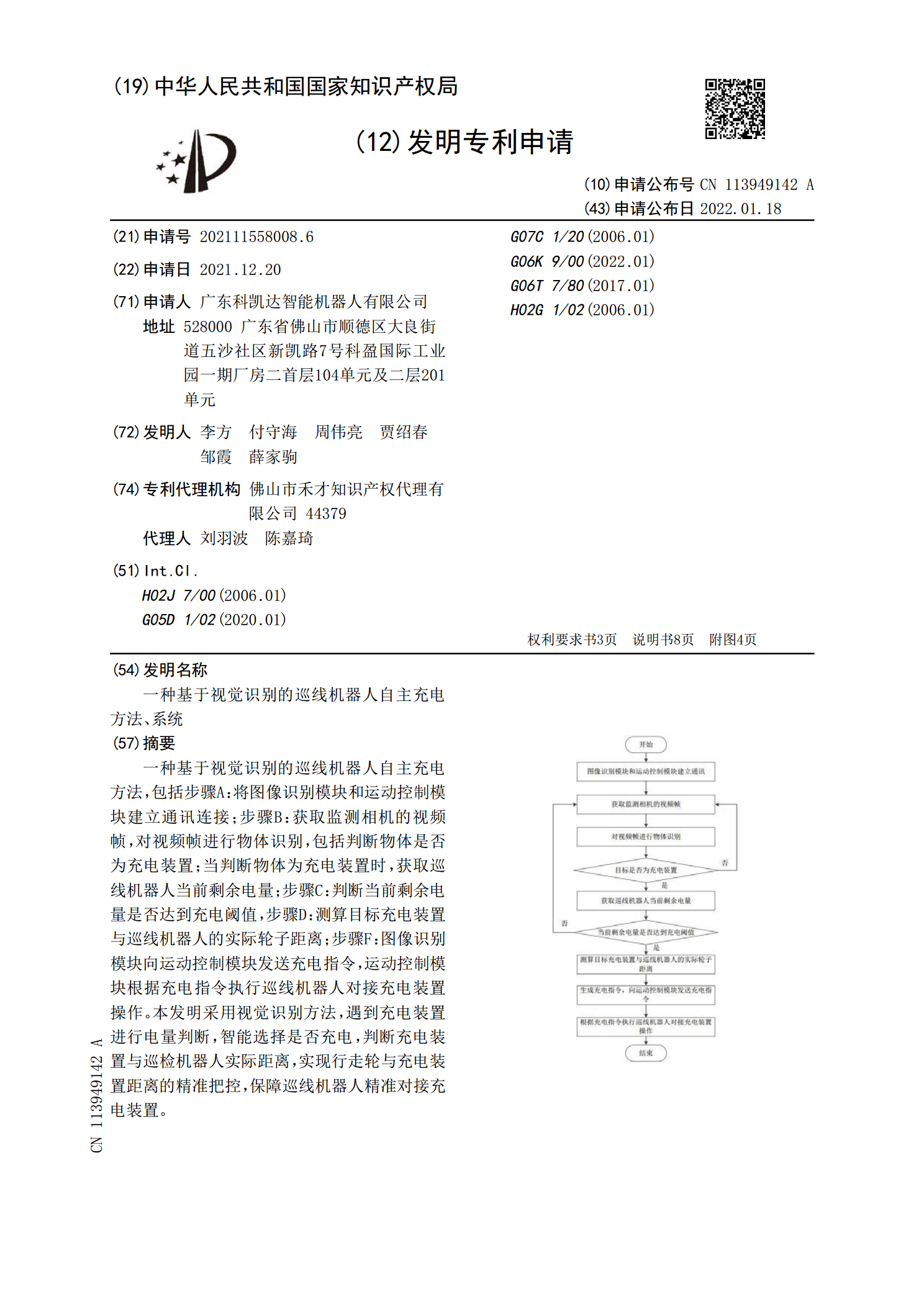
一种基于视觉识别的巡线机器人自主充电方法,包括步骤A:将图像识别模块和运动控制模块建立通讯连接;步骤B:获取监测相机的视频帧,对视频帧进行物体识别,包括判断物体是否为充电装置;当判断物体为充电装置时,获取巡线机器人当前剩余电量;步骤C:判断当前剩余电量是否达到充电阈值,步骤D:测算目标充电装置与巡线机器人的实际轮子距离;步骤F:图像识别模块向运动控制模块发送充电指令,运动控制模块根据充电指令执行巡线机器人对接充电装置操作。本发明采用视觉识别方法,遇到充电装置进行电量判断,智能选择是否充电,判断充电装置与巡

巡线机器人的充电对接及特性分析.docx
巡线机器人的充电对接及特性分析标题:巡线机器人的充电对接及特性分析摘要:巡线机器人是一种能够自主巡线、监测和检测线路的智能设备。为了保证巡线机器人持续工作,其充电对接系统的设计和特性分析至关重要。本论文通过对巡线机器人充电对接系统的研究,分析其特性并提出改进措施。第一节:引言1.1研究背景1.2研究目的和意义第二节:巡线机器人充电对接系统的基本原理2.1巡线机器人充电需求分析2.2巡线机器人充电接口设计2.3巡线机器人充电方式选择第三节:巡线机器人充电对接系统的特性分析3.1充电效率3.2充电速度3.3充

巡线机器人的充电对接及特性分析.docx
巡线机器人的充电对接及特性分析标题:巡线机器人的充电对接及特性分析摘要:随着自动化技术的迅速发展,巡线机器人在各类工业和服务领域中的应用越来越广泛。充电对接是巡线机器人正常运行的关键环节,本论文将对巡线机器人的充电对接技术及其特性进行深入分析,旨在为巡线机器人的设计和运维提供参考,以满足工业和服务领域对巡线机器人的不断增长的需求。1.引言巡线机器人是一种能够根据预定路径自主移动的机器人,广泛应用于工业自动化、服务业和日常生活中。为了能够持续工作,巡线机器人需要合理高效地进行充电对接,充电对接技术及其特性对
一种巡线无人机充电系统及方法.pdf
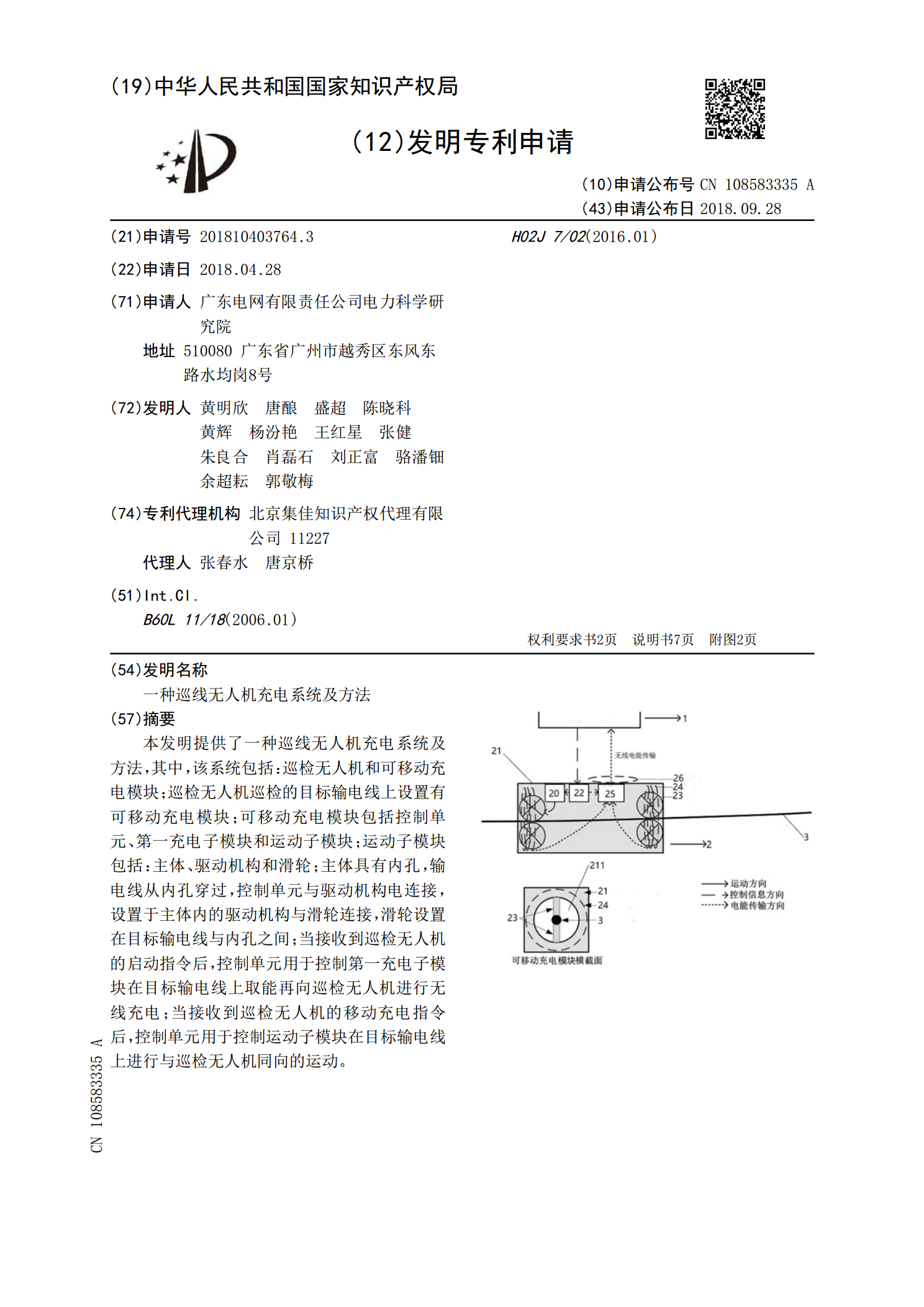
本发明提供了一种巡线无人机充电系统及方法,其中,该系统包括:巡检无人机和可移动充电模块;巡检无人机巡检的目标输电线上设置有可移动充电模块;可移动充电模块包括控制单元、第一充电子模块和运动子模块;运动子模块包括:主体、驱动机构和滑轮;主体具有内孔,输电线从内孔穿过,控制单元与驱动机构电连接,设置于主体内的驱动机构与滑轮连接,滑轮设置在目标输电线与内孔之间;当接收到巡检无人机的启动指令后,控制单元用于控制第一充电子模块在目标输电线上取能再向巡检无人机进行无线充电;当接收到巡检无人机的移动充电指令后,控制单元用