
一种基于点云空间位置实现的点云全自动分割方法.pdf

努力****晓骞

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于点云空间位置实现的点云全自动分割方法.pdf
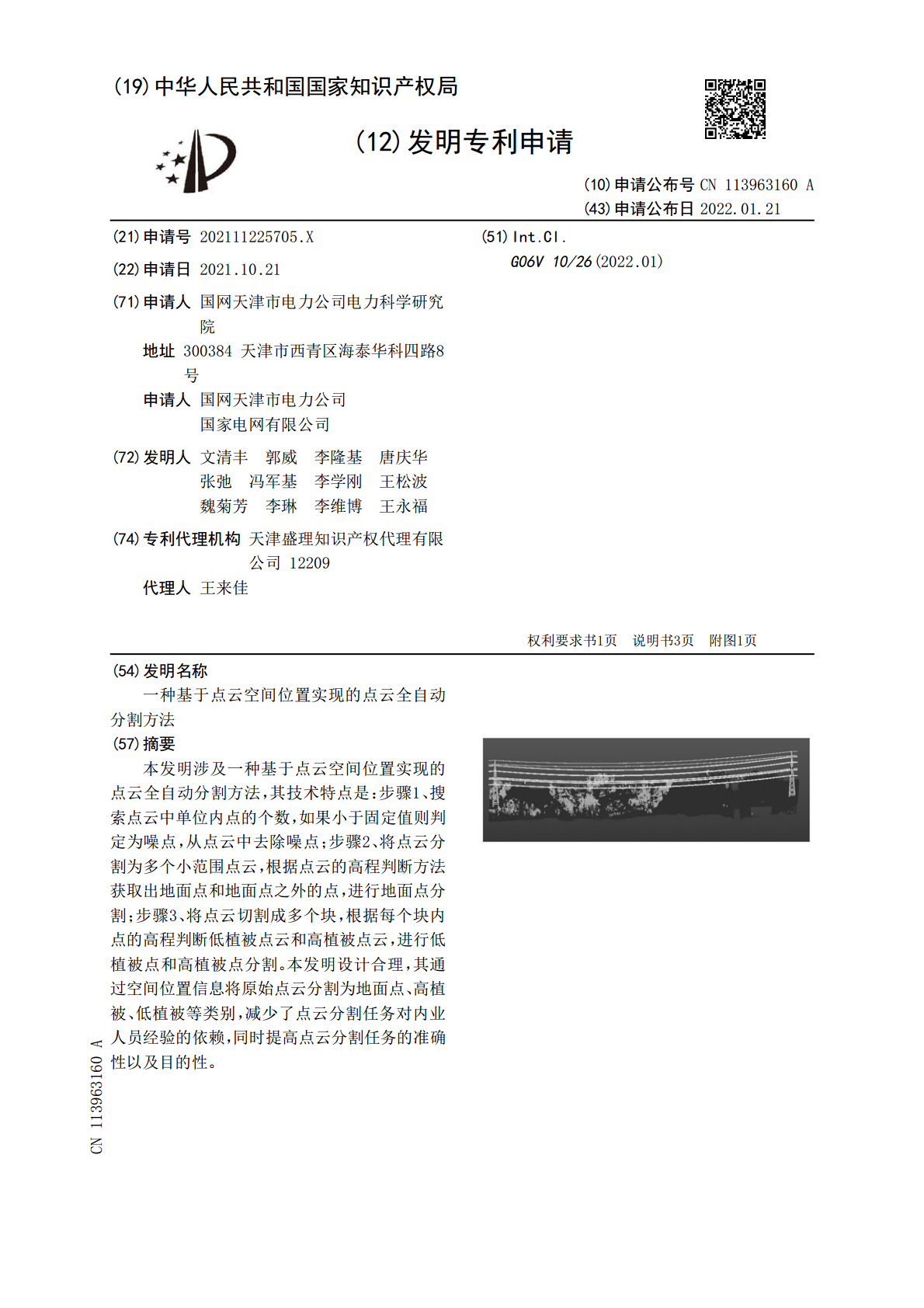
本发明涉及一种基于点云空间位置实现的点云全自动分割方法,其技术特点是:步骤1、搜索点云中单位内点的个数,如果小于固定值则判定为噪点,从点云中去除噪点;步骤2、将点云分割为多个小范围点云,根据点云的高程判断方法获取出地面点和地面点之外的点,进行地面点分割;步骤3、将点云切割成多个块,根据每个块内点的高程判断低植被点云和高植被点云,进行低植被点和高植被点分割。本发明设计合理,其通过空间位置信息将原始点云分割为地面点、高植被、低植被等类别,减少了点云分割任务对内业人员经验的依赖,同时提高点云分割任务的准确性以及

基于多维欧氏空间相似度的激光点云分割方法.docx
基于多维欧氏空间相似度的激光点云分割方法基于多维欧氏空间相似度的激光点云分割方法摘要:激光点云分割是一项重要的任务,广泛应用于三维重建、机器人感知、无人驾驶等领域。本文提出了一种基于多维欧氏空间相似度的激光点云分割方法。该方法通过计算点云中点之间的距离和颜色特征,利用多维欧氏空间相似度进行点云的聚类和分割。实验结果表明,该方法能够准确地将激光点云分割为不同的物体,并具有较好的性能。关键词:激光点云;分割;多维欧氏空间相似度;聚类1.引言激光点云是由激光扫描仪产生的三维数据,用于描述物体的几何形状和表面信息

基于点云数据的分割方法综述.docx
基于点云数据的分割方法综述基于点云数据的分割方法综述摘要:近年来,随着三维扫描技术和深度学习的快速发展,点云数据的获取和处理变得越来越容易。点云数据分割是一个重要的研究领域,它在多个领域中具有广泛的应用,如机器人导航、自动驾驶和虚拟现实等。本文综述了基于点云数据的分割方法,包括传统的基于几何特征的方法和最近的基于深度学习的方法。我们对这些方法的原理、优缺点进行了详细的分析和比较,并讨论了未来的研究方向和挑战。1.引言点云数据是由大量的离散点组成的三维数据表示,它可以精确地描述物体的几何形状和表面信息。点云
基于点云的植物花瓣分割方法.pdf
本发明公开了一种基于点云的植物花瓣分割方法,属于农林业技术领域,针对多瓣扁型植物花朵,先提取植物花朵的三维点云数据;根据植物花朵的三维点云数据,计算点云中点的坐标,确定花朵主轴的近似经纬度,并将花朵点云的主轴旋转至与Y轴重合;然后根据花朵主轴方向,将花朵点云的直角坐标变换成圆柱坐标;根据变换后的花朵点云坐标,对花朵底部进行分割,确定花瓣的位置,最后对花瓣的边界进行分割,得到分割后的花瓣。该方法能够快速分割出花朵中的花瓣,无需大量点云数据,且分割精度高。

一种基于点云数据自动增强的三维点云语义分割方法.pdf
本发明公开了一种基于点云数据自动增强的三维点云语义分割方法。该发明可以进一步增强以PointNet++为代表的点云语义分割算法在不同应用场景下的泛化性能。以往点云语义分割算法通常存在两个问题:一是利用传统的数据增强方法;二是将数据增强与网络训练分为两个阶段。本发明提出的基于点云数据自动增强的三维点云语义分割方法,通过考虑样本的基本几何结构,为每个输入样本回归一个特定的增强函数,同时学习点云样本的形状变换和逐点位移,并联合优化增强函数和优化器,解决网络中输入样本多样性不足的问题,增强网络的泛化能力。