
基于多维欧氏空间相似度的激光点云分割方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于多维欧氏空间相似度的激光点云分割方法.docx
基于多维欧氏空间相似度的激光点云分割方法基于多维欧氏空间相似度的激光点云分割方法摘要:激光点云分割是一项重要的任务,广泛应用于三维重建、机器人感知、无人驾驶等领域。本文提出了一种基于多维欧氏空间相似度的激光点云分割方法。该方法通过计算点云中点之间的距离和颜色特征,利用多维欧氏空间相似度进行点云的聚类和分割。实验结果表明,该方法能够准确地将激光点云分割为不同的物体,并具有较好的性能。关键词:激光点云;分割;多维欧氏空间相似度;聚类1.引言激光点云是由激光扫描仪产生的三维数据,用于描述物体的几何形状和表面信息

基于空间相似聚类的点云数据分割方法研究与实验.docx
基于空间相似聚类的点云数据分割方法研究与实验基于空间相似聚类的点云数据分割方法研究与实验摘要:点云数据是数字化表示三维空间中物体表面的一种重要数据形式。点云数据分割是点云处理的关键任务之一,它的目标是将点云数据按照物体的不同部分进行划分。本文提出了一种基于空间相似聚类的点云数据分割方法,并通过实验验证了该方法的有效性。实验结果表明,该方法能够实现对点云数据的准确、高效分割。关键词:点云数据;分割;空间相似;聚类1.引言点云数据是现实世界中物体的三维点集合的数字化表示方式。随着3D扫描技术的快速发展,获取点

基于改进欧氏聚类的散乱工件点云分割.docx
基于改进欧氏聚类的散乱工件点云分割基于改进欧氏聚类的散乱工件点云分割摘要:点云分割是三维点云处理中的重要任务,尤其在工业领域中,对散乱工件进行准确的分割具有重要意义。本论文提出了一种基于改进欧氏聚类的散乱工件点云分割方法。首先,使用欧氏聚类算法对点云进行原始分割。然后,通过迭代优化算法,对欧氏聚类结果进行评估和调整,以提高分割精度。实验证明,该方法能够有效地对散乱工件点云进行准确的分割,具有较高的分割精度和鲁棒性。1.引言点云是一种由大量离散点构成的三维数据形式,广泛应用于机器人感知、自动驾驶、虚拟现实等

基于深度学习与机载激光点云的单株树冠分割方法.pdf
本发明公开一种基于深度学习与机载激光点云的单株树冠分割方法,包括获取研究场地的点云数据;将去噪后的点云数据分为地上点和地面点;提取地上点中单株树木点云,将不同树木划分在不同的体素内;构造训练样本数据集;对PointNet深度神经网络开展训练;将待测场地的地上点通过体素化的方法细分为多个体素,将体素内点云数据转换为PointNet所需格式后,输入到训练好的PointNet模型内,识别出树的每个体素中的点云;将每个体素DSM的梯度信息结合惯性动量梯度的方法定位树冠的边界点,根据边界点勾勒出分割的树冠。本发明在
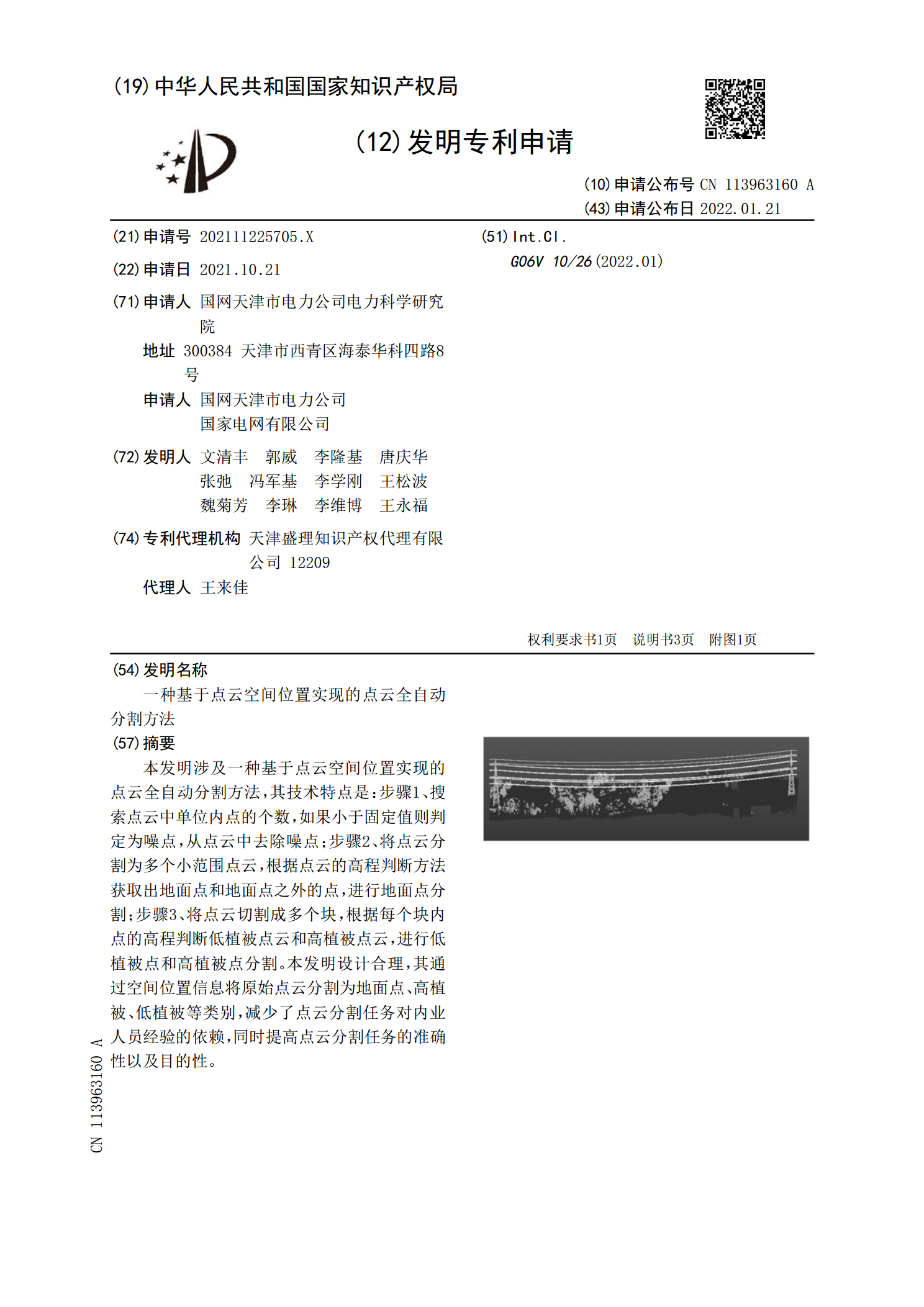
一种基于点云空间位置实现的点云全自动分割方法.pdf
本发明涉及一种基于点云空间位置实现的点云全自动分割方法,其技术特点是:步骤1、搜索点云中单位内点的个数,如果小于固定值则判定为噪点,从点云中去除噪点;步骤2、将点云分割为多个小范围点云,根据点云的高程判断方法获取出地面点和地面点之外的点,进行地面点分割;步骤3、将点云切割成多个块,根据每个块内点的高程判断低植被点云和高植被点云,进行低植被点和高植被点分割。本发明设计合理,其通过空间位置信息将原始点云分割为地面点、高植被、低植被等类别,减少了点云分割任务对内业人员经验的依赖,同时提高点云分割任务的准确性以及