
基于二维码定位的电力巡检无人机自主起降方法.pdf

努力****亚捷

1/10
2/10
3/10
4/10

5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于二维码定位的电力巡检无人机自主起降方法.pdf
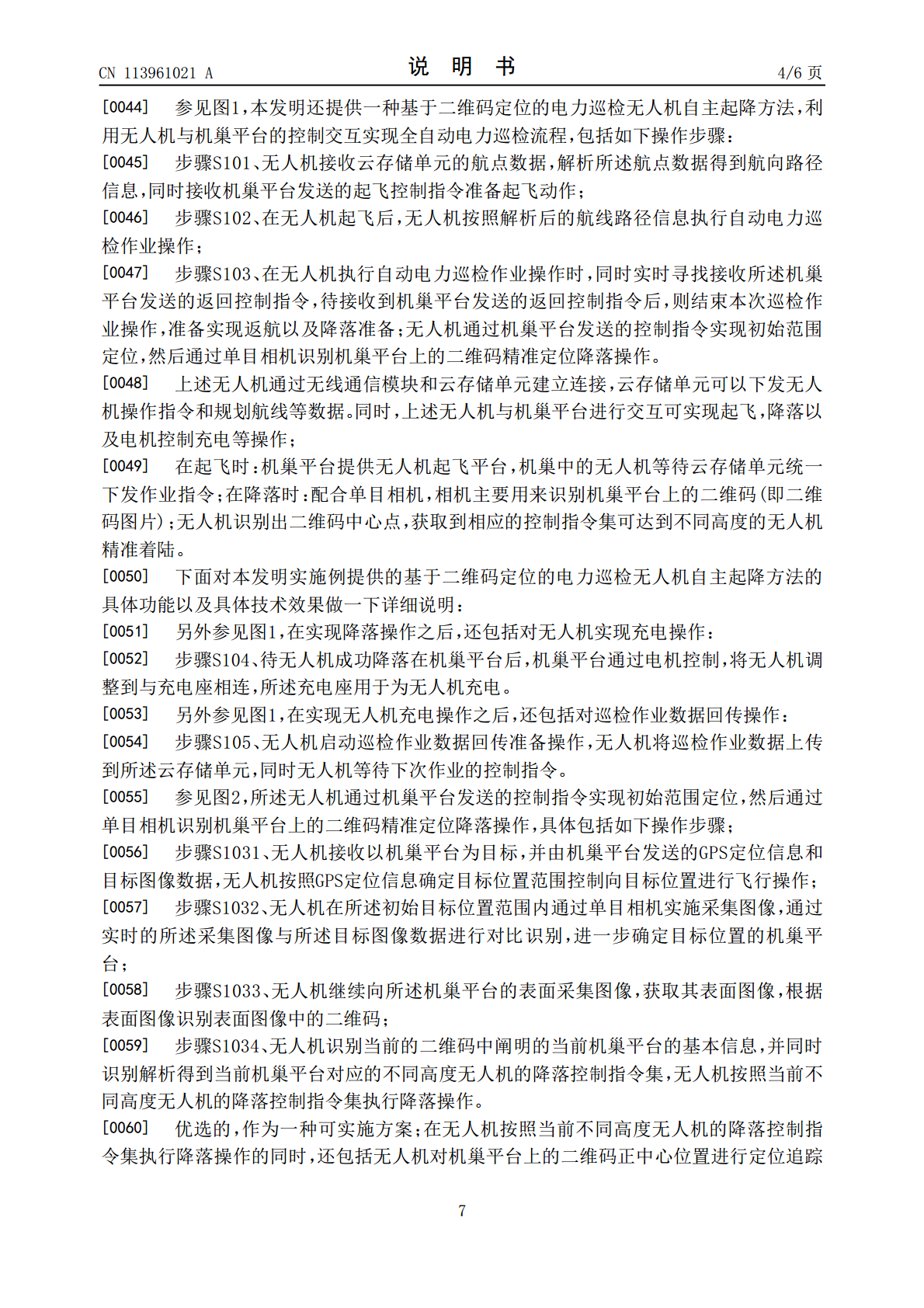
本发明公开了一种基于二维码定位的电力巡检无人机自主起降方法,无人机接收云存储单元的航点数据,解析航点数据得到航向路径信息,同时接收机巢平台发送的起飞控制指令准备起飞动作;在无人机执行自动电力巡检作业操作时,同时实时寻找接收机巢平台发送的返回控制指令;无人机通过机巢平台发送的控制指令实现初始范围定位,然后通过单目相机识别机巢平台上的二维码精准定位降落操作。上述基于二维码定位的电力巡检无人机自主起降方法,其显著提升了巡检效率以及安全精准降落的技术效果。

基于强化学习的无人机全自主电力巡检.pptx
添加副标题目录PART01PART02无人机电力巡检的意义传统无人机巡检的局限性基于强化学习的无人机全自主巡检的优势PART03强化学习基本原理基于强化学习的无人机巡检策略强化学习在无人机巡检中的关键技术PART04系统总体架构无人机平台及传感器配置强化学习算法模型任务调度与控制模块PART05实验场景与数据集实验方法与评估指标实验结果与分析结果比较与讨论PART06研究结论研究不足与展望感谢您的观看

一种基于无人机的电力巡检方法.pdf
本发明涉及电力巡检技术领域,且公开了一种基于无人机的电力巡检方法,包括以下步骤,无人机搭载照明系统、红外成像系统、视频录像系统、红外测距系统、GPS定位系统、控制系统和信号收发系统,地面设置信号收发器和显示器,制定巡检线路,根据电力系统的走向制定合理的无人机巡检路线,清理路线中的林木障碍。该基于无人机的电力巡检方法,通过线路障碍规避记录,无人机在巡检过程中,红外测距系统采集无人机与地面的距离数据,判断林木滋长情况如此,无人机巡检路线下的树木如果滋长到快要威胁无人机的高度时,地面人员可以派人前去砍伐修剪这些

一种电力巡检无人机起降点自动生成方法及系统.pdf
本发明公开了一种电力巡检无人机起降点自动生成方法及系统。方法包括:S1、导入电塔位置数据、基础地形地理数据、空域通行数据、RTK信号覆盖区域数据;S2、基于DEM高程模型判断巡检区域的地形类型,若地形类型为平原区则获取该区域的图层并作为面分析底图;若地形类型为山区则进行区域高点分析以得到高点集图层并作为点分析底图;S3、基于遥感影像地物分析识别法提取起降点人员可通行区域中满足起降条件的地质区域,获得可通行地质区图层;S4、将分析底图、可通行地质区图层、RTK强网络信号图层、空域非限区图层进行空间叠置分析得

单目视觉自主巡检图像采集方法、装置及电力巡检无人机.pdf
本发明公开了单目视觉自主巡检图像采集方法、装置及电力巡检无人机。该方法包括:根据预先获取的分区规划航线数据,及从导航定位模块获取的实时位置数据,控制电力巡检无人机依次在航线内各预定航点停留,其中,航线内包括M个预定航点,在第i个预定航点视野内包括有N