
用于运载工具的方法和系统.pdf

是浩****32

1/10
2/10
3/10
4/10
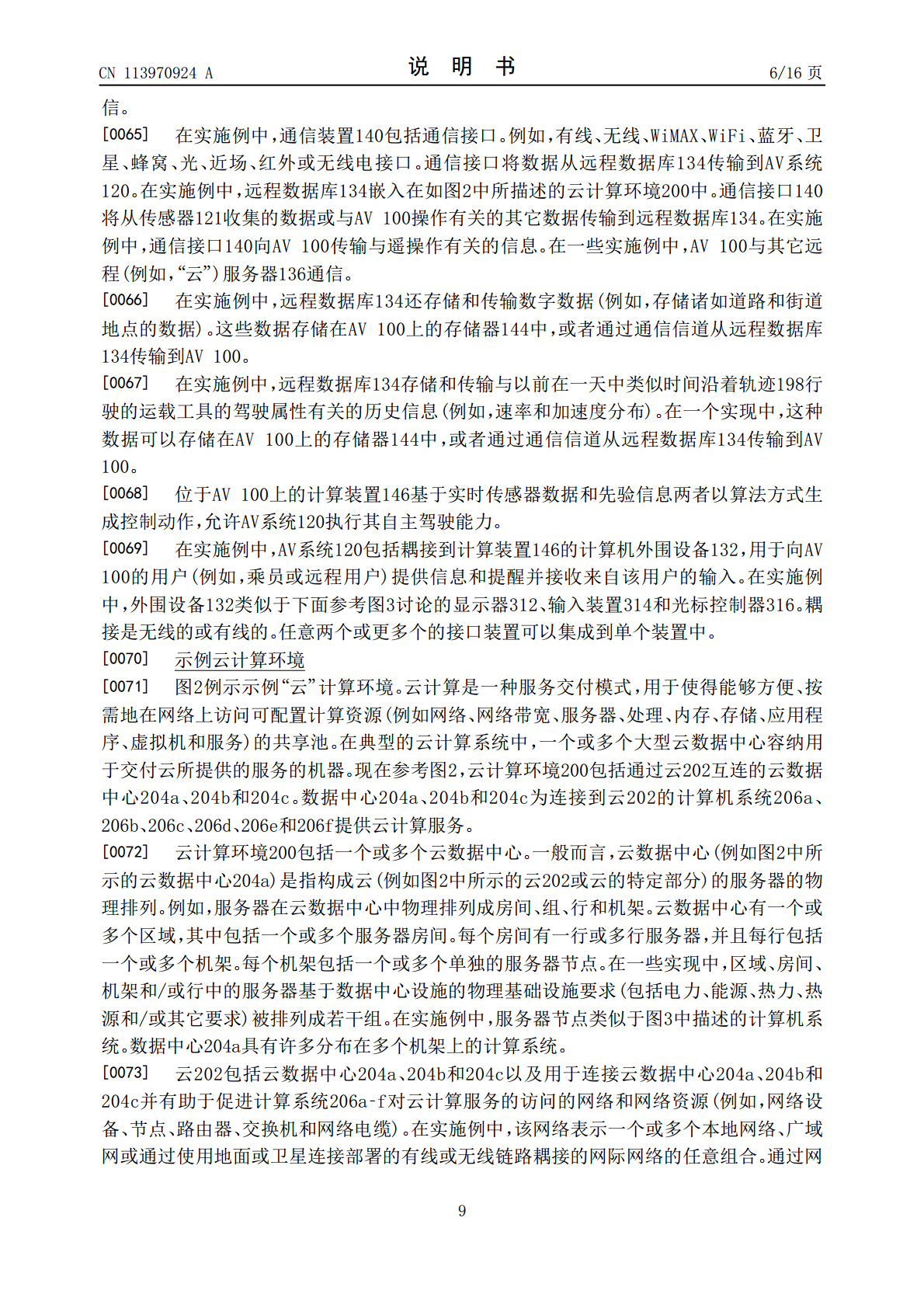
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共36页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于运载工具的方法和系统.pdf
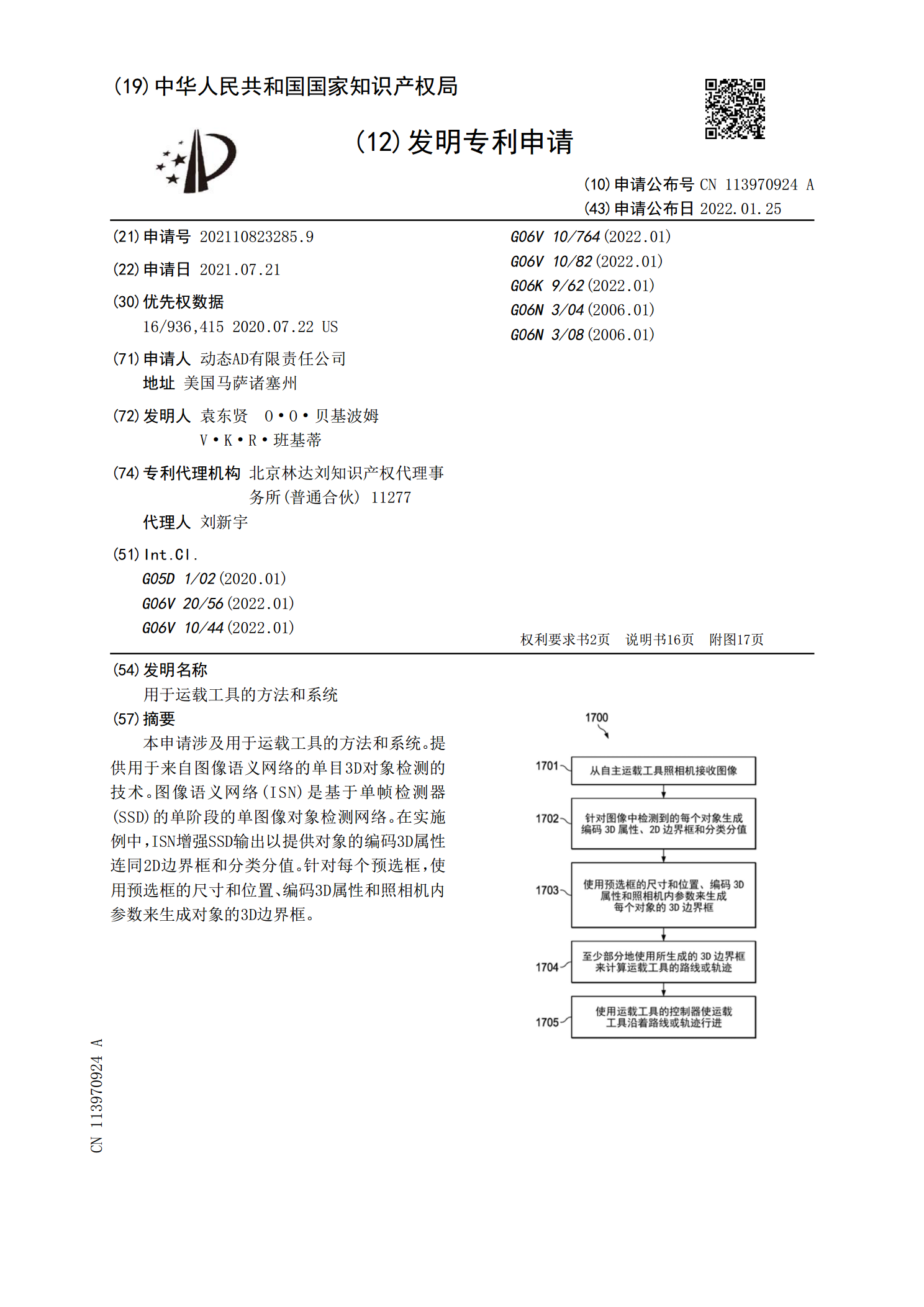
本申请涉及用于运载工具的方法和系统。提供用于来自图像语义网络的单目3D对象检测的技术。图像语义网络(ISN)是基于单帧检测器(SSD)的单阶段的单图像对象检测网络。在实施例中,ISN增强SSD输出以提供对象的编码3D属性连同2D边界框和分类分值。针对每个预选框,使用预选框的尺寸和位置、编码3D属性和照相机内参数来生成对象的3D边界框。

用于运载工具的方法和系统以及存储介质.pdf
本发明涉及一种用于运载工具的方法和系统以及存储介质。提供了用于可切换轮视镜的系统,其可以选择性地提供运载工具的一个或多个轮的视图以例如检查障碍物。用于可切换轮视镜的系统可以包括耦接到运载工具的图像传感器、反射面和致动器。图像传感器可以捕获图像传感器的视场内的图像。反射面可以耦接到致动器,该致动器使反射面在第一位置和第二位置之间移动。在第一位置,运载工具的轮的至少一部分的视图在反射面内可见,并且反射面至少部分地布置在图像传感器的视场内。还提供了方法和计算机程序产品。

用于控制运载工具的系统、方法.pdf
一种控制运载工具执行安全动作的系统及其方法,所述系统包括:侧向盲区检测模块,被配置为确定由于第二运载工具在第一运载工具的侧向方向上的遮蔽而形成了所述第一运载工具的侧向盲区;移动特征监视模块,被配置为响应于所述侧向盲区被确定来监视所述第二运载工具的移动特征;以及安全动作控制模块,被配置为基于所述第二运载工具的被监视到的所述移动特征来控制所述第一运载工具执行安全动作。
用于运载工具的方法和存储介质.pdf
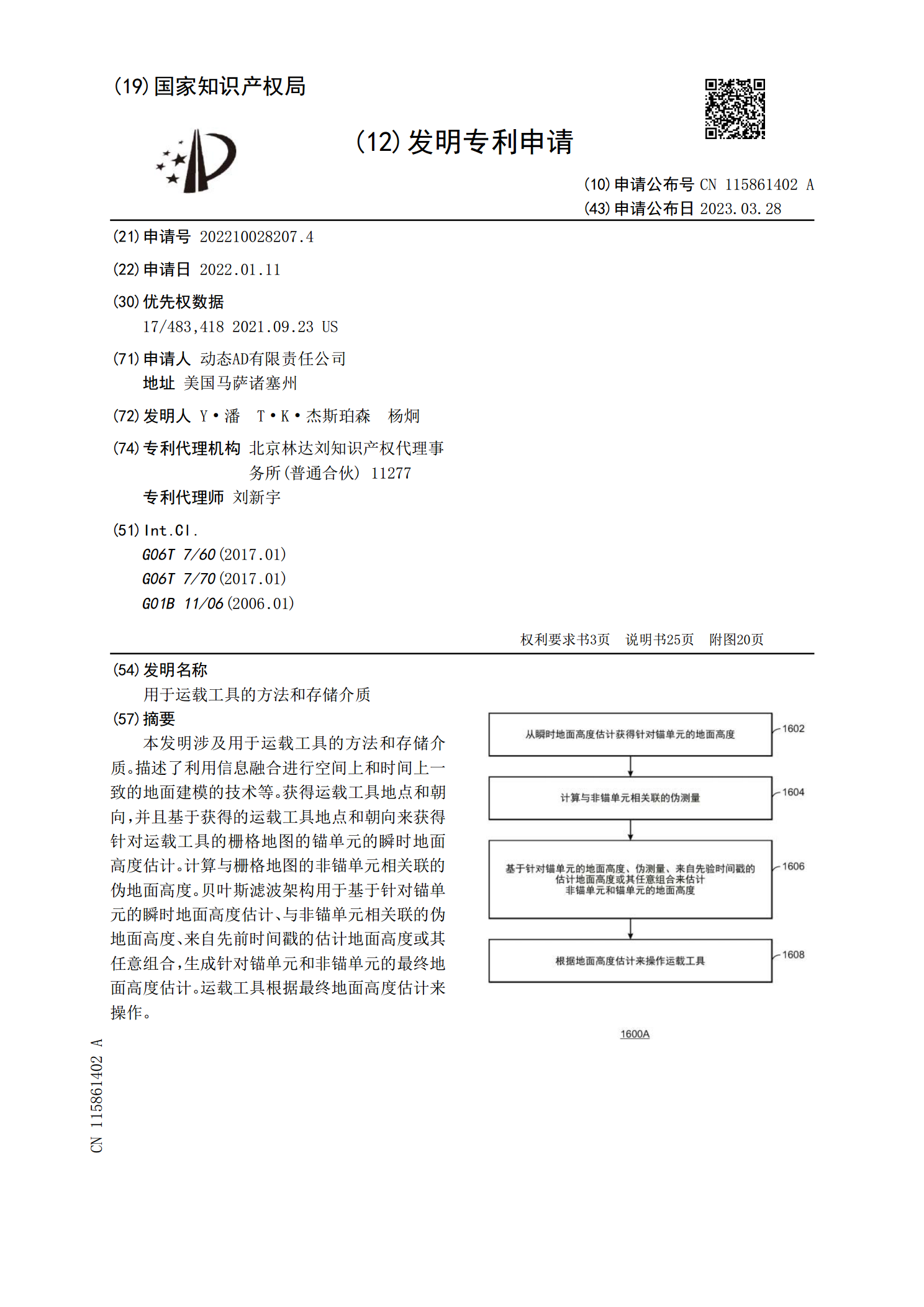
本发明涉及用于运载工具的方法和存储介质。描述了利用信息融合进行空间上和时间上一致的地面建模的技术等。获得运载工具地点和朝向,并且基于获得的运载工具地点和朝向来获得针对运载工具的栅格地图的锚单元的瞬时地面高度估计。计算与栅格地图的非锚单元相关联的伪地面高度。贝叶斯滤波架构用于基于针对锚单元的瞬时地面高度估计、与非锚单元相关联的伪地面高度、来自先前时间戳的估计地面高度或其任意组合,生成针对锚单元和非锚单元的最终地面高度估计。运载工具根据最终地面高度估计来操作。
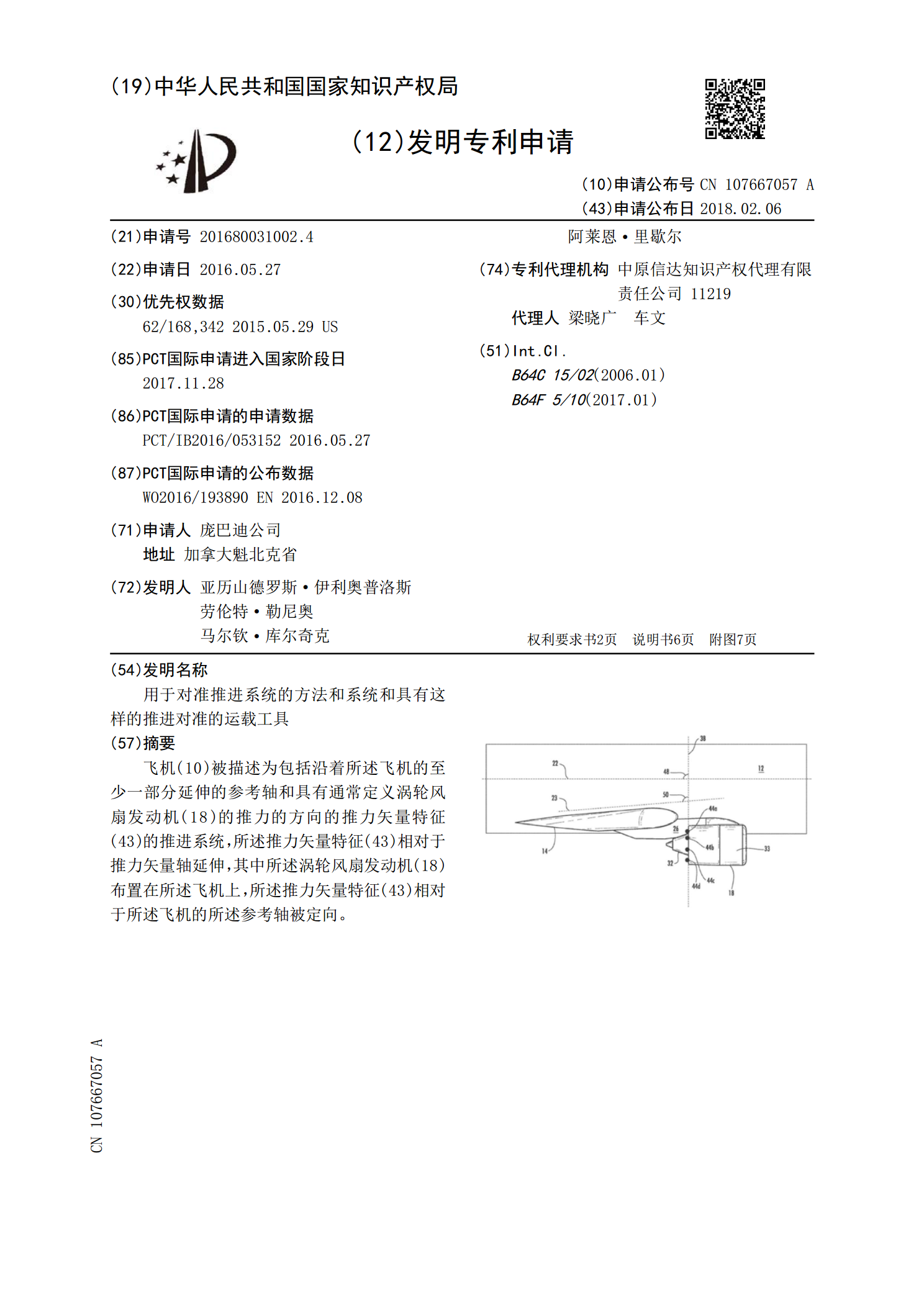
用于对准推进系统的方法和系统和具有这样的推进对准的运载工具.pdf
飞机(10)被描述为包括沿着所述飞机的至少一部分延伸的参考轴和具有通常定义涡轮风扇发动机(18)的推力的方向的推力矢量特征(43)的推进系统,所述推力矢量特征(43)相对于推力矢量轴延伸,其中所述涡轮风扇发动机(18)布置在所述飞机上,所述推力矢量特征(43)相对于所述飞机的所述参考轴被定向。