
车辆驱动防滑控制方法、装置、设备及存储介质.pdf

Ro****44


1/10
2/10

3/10

4/10
5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆驱动防滑控制方法、装置、设备及存储介质.pdf
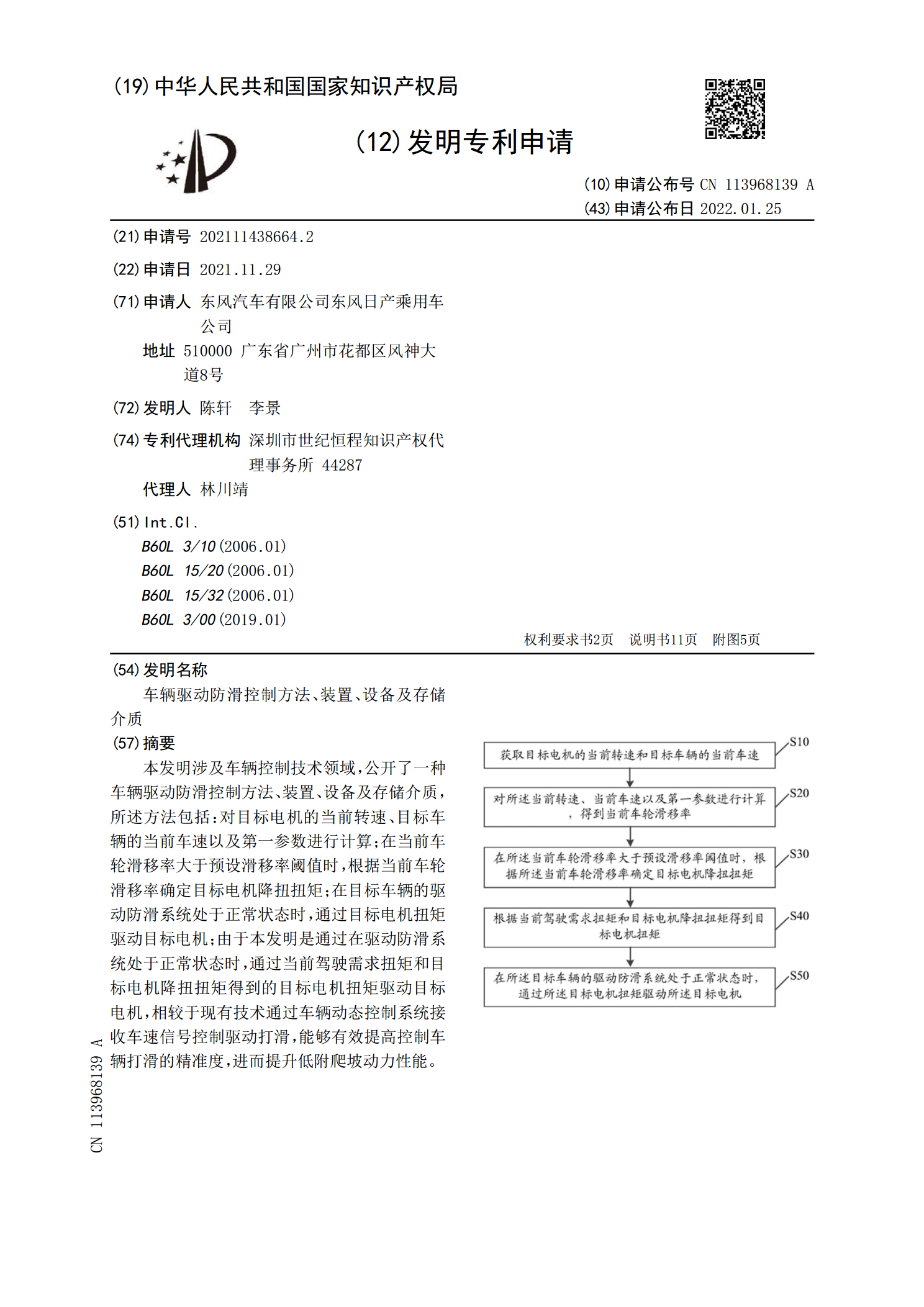
本发明涉及车辆控制技术领域,公开了一种车辆驱动防滑控制方法、装置、设备及存储介质,所述方法包括:对目标电机的当前转速、目标车辆的当前车速以及第一参数进行计算;在当前车轮滑移率大于预设滑移率阈值时,根据当前车轮滑移率确定目标电机降扭扭矩;在目标车辆的驱动防滑系统处于正常状态时,通过目标电机扭矩驱动目标电机;由于本发明是通过在驱动防滑系统处于正常状态时,通过当前驾驶需求扭矩和目标电机降扭扭矩得到的目标电机扭矩驱动目标电机,相较于现有技术通过车辆动态控制系统接收车速信号控制驱动打滑,能够有效提高控制车辆打滑的精
防滑控制方法、装置、控制设备、车辆及存储介质.pdf
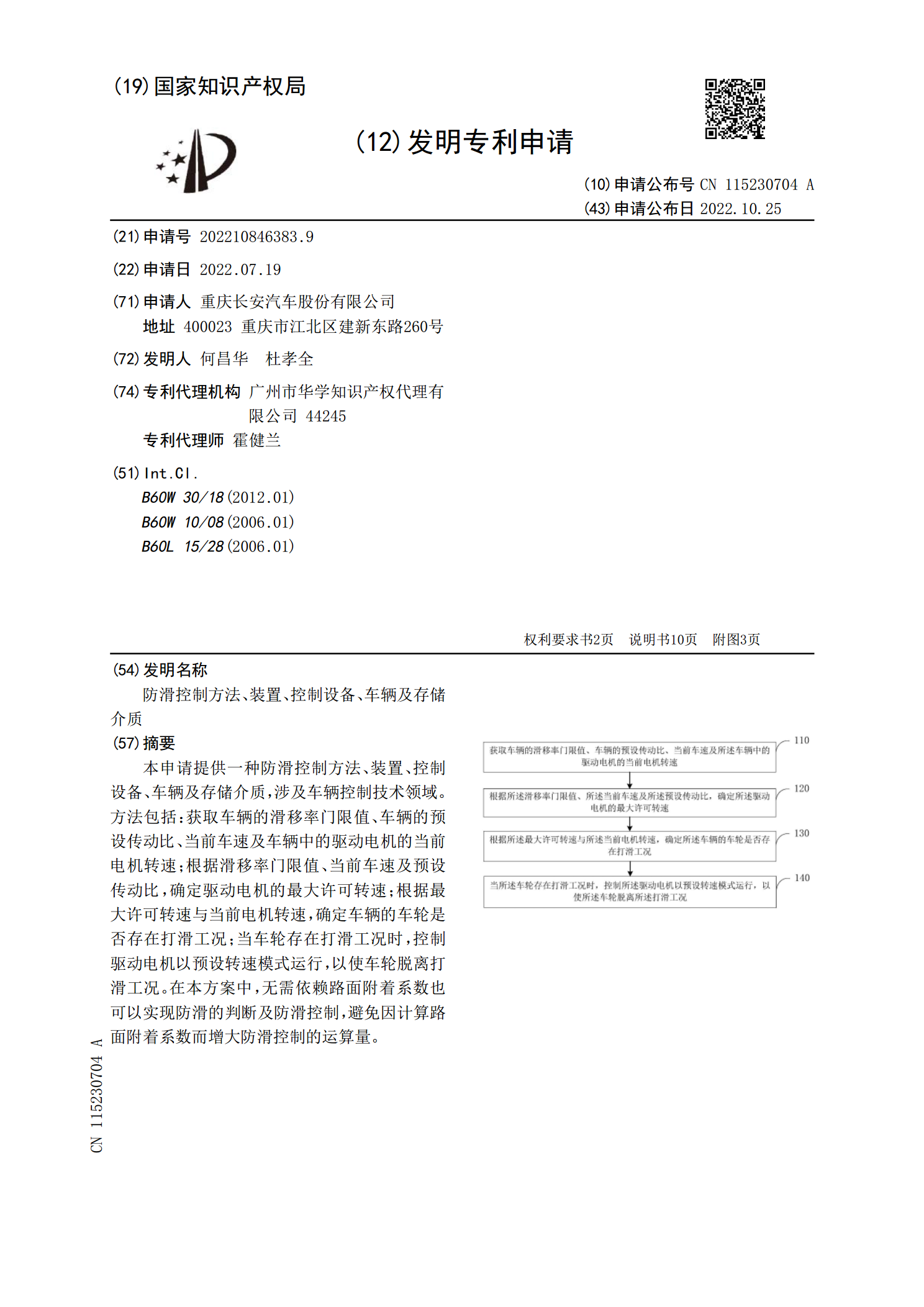
本申请提供一种防滑控制方法、装置、控制设备、车辆及存储介质,涉及车辆控制技术领域。方法包括:获取车辆的滑移率门限值、车辆的预设传动比、当前车速及车辆中的驱动电机的当前电机转速;根据滑移率门限值、当前车速及预设传动比,确定驱动电机的最大许可转速;根据最大许可转速与当前电机转速,确定车辆的车轮是否存在打滑工况;当车轮存在打滑工况时,控制驱动电机以预设转速模式运行,以使车轮脱离打滑工况。在本方案中,无需依赖路面附着系数也可以实现防滑的判断及防滑控制,避免因计算路面附着系数而增大防滑控制的运算量。
车辆驱动状态的控制方法、系统、装置、设备及存储介质.pdf
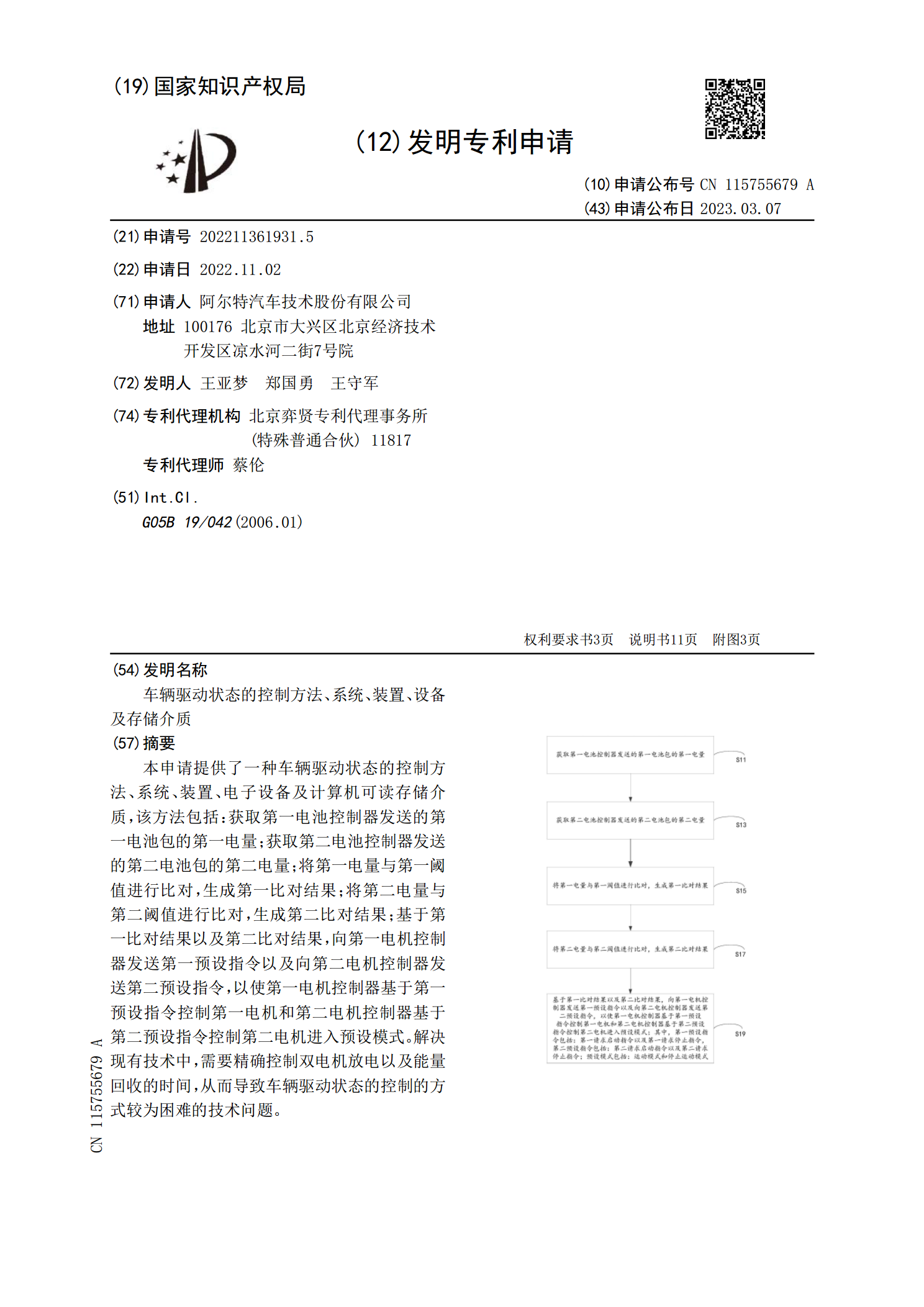
本申请提供了一种车辆驱动状态的控制方法、系统、装置、电子设备及计算机可读存储介质,该方法包括:获取第一电池控制器发送的第一电池包的第一电量;获取第二电池控制器发送的第二电池包的第二电量;将第一电量与第一阈值进行比对,生成第一比对结果;将第二电量与第二阈值进行比对,生成第二比对结果;基于第一比对结果以及第二比对结果,向第一电机控制器发送第一预设指令以及向第二电机控制器发送第二预设指令,以使第一电机控制器基于第一预设指令控制第一电机和第二电机控制器基于第二预设指令控制第二电机进入预设模式。解决现有技术中,需要

驱动控制方法、装置、电动车辆、电子设备及存储介质.pdf
本申请公开了一种驱动控制方法、装置、电动车辆、电子设备及存储介质,其中方法包括:在车辆处于第一驾驶模式的情况下,接收第一加速请求;根据所述第一加速请求,生成转速目标值,其中,所述转速目标值小于在第二驾驶模式下所述第一加速请求对应的转速;响应于所述第一加速请求,控制所述车辆的电机的转速增大,直至所述电机的转速达到所述转速目标值。本申请实施例能够解决车辆较难脱困的问题。
驱动控制方法、装置、电动车辆、电子设备及存储介质.pdf
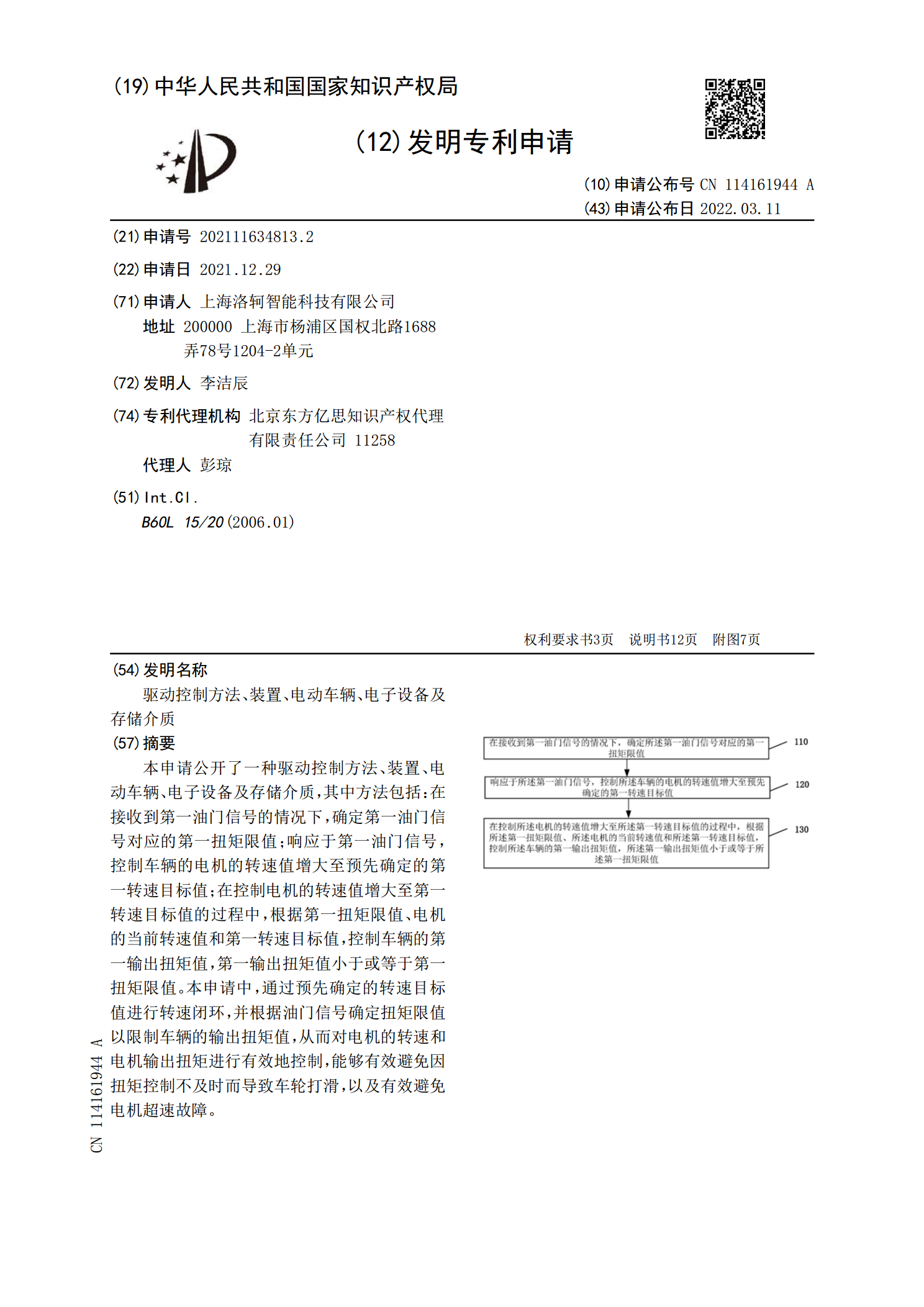
本申请公开了一种驱动控制方法、装置、电动车辆、电子设备及存储介质,其中方法包括:在接收到第一油门信号的情况下,确定第一油门信号对应的第一扭矩限值;响应于第一油门信号,控制车辆的电机的转速值增大至预先确定的第一转速目标值;在控制电机的转速值增大至第一转速目标值的过程中,根据第一扭矩限值、电机的当前转速值和第一转速目标值,控制车辆的第一输出扭矩值,第一输出扭矩值小于或等于第一扭矩限值。本申请中,通过预先确定的转速目标值进行转速闭环,并根据油门信号确定扭矩限值以限制车辆的输出扭矩值,从而对电机的转速和电机输出扭