
用于识别车道线的方法、装置、设备、介质和产品.pdf

是你****馨呀

1/10
2/10
3/10

4/10
5/10
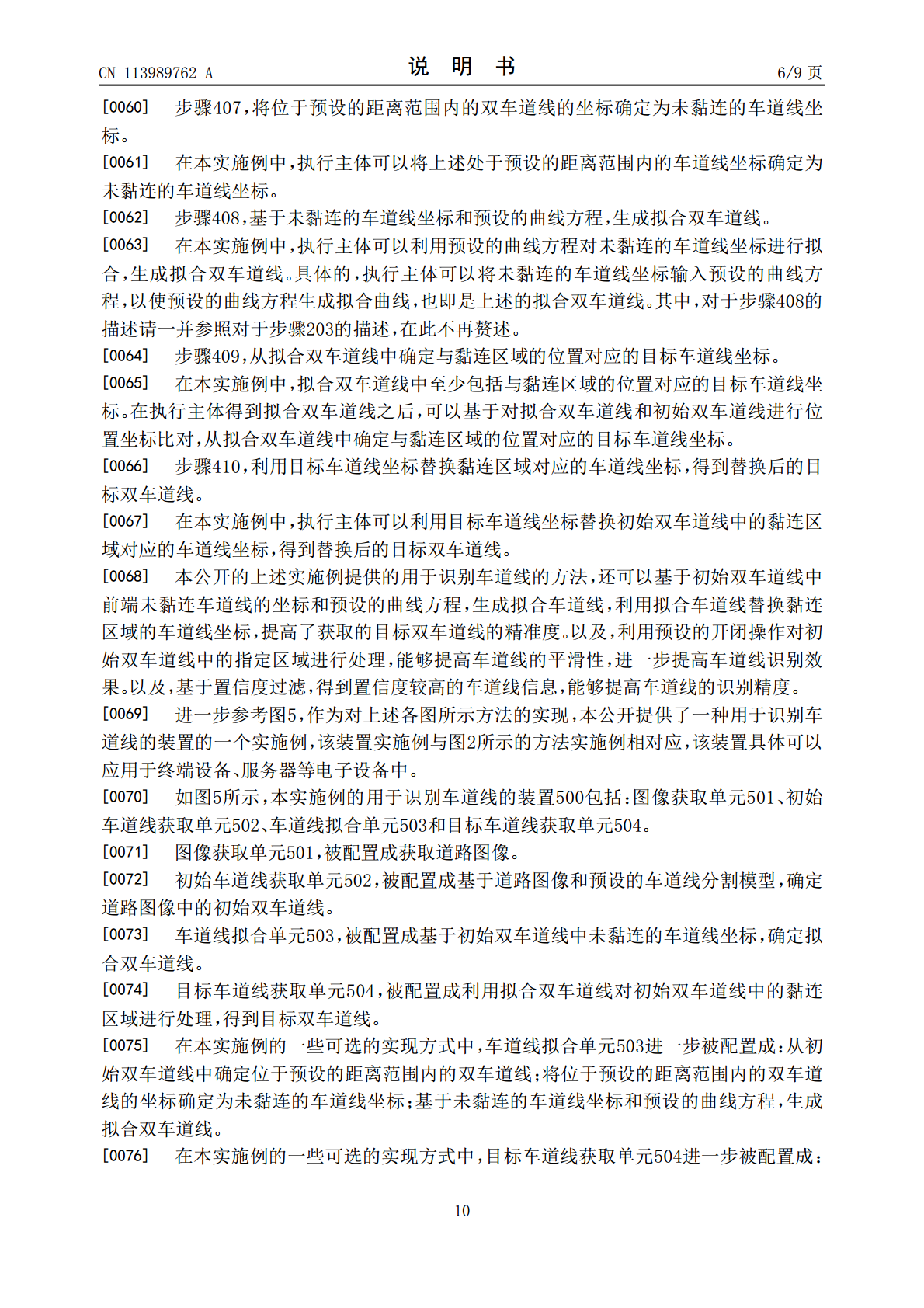
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于识别车道线的方法、装置、设备、介质和产品.pdf
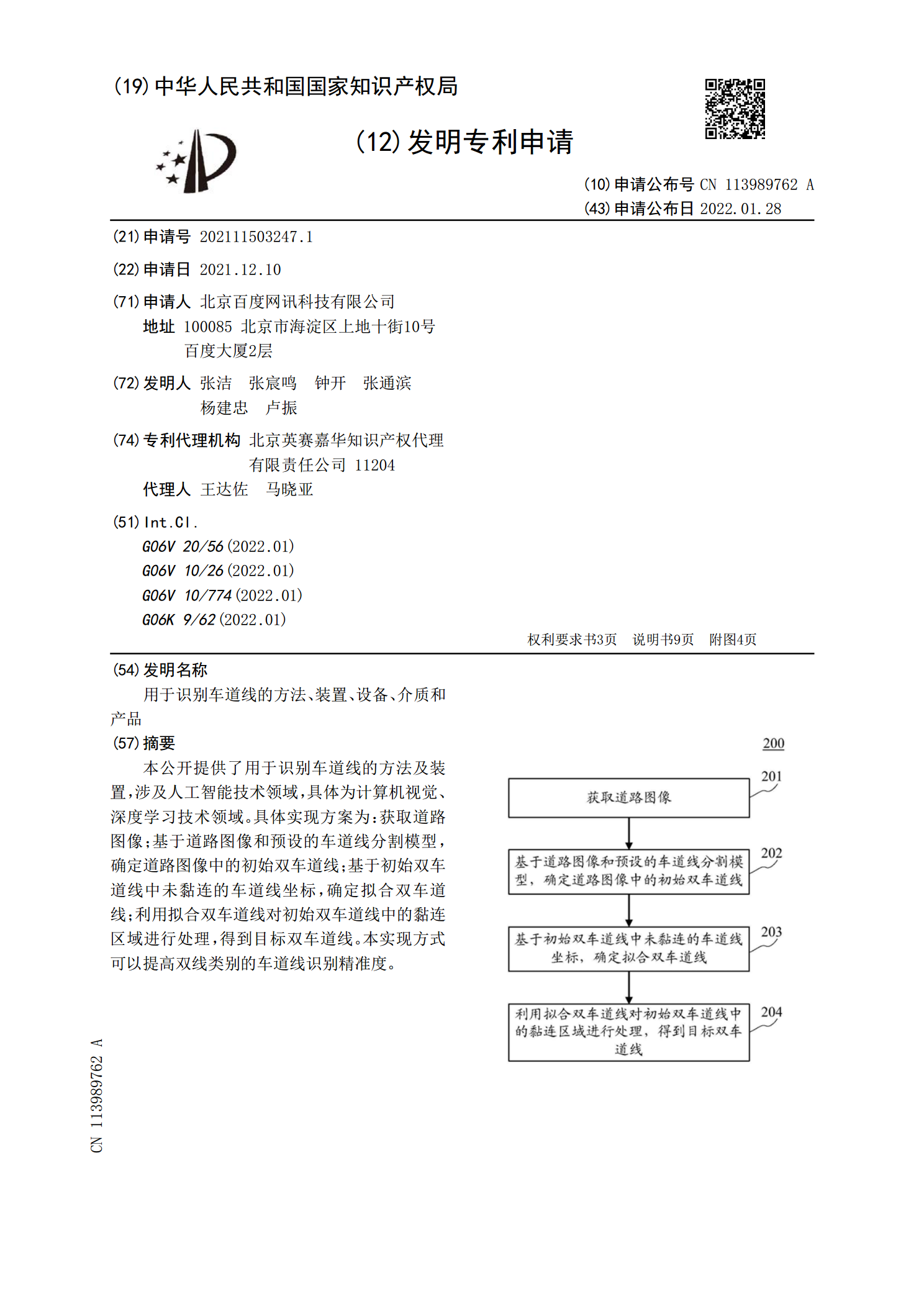
本公开提供了用于识别车道线的方法及装置,涉及人工智能技术领域,具体为计算机视觉、深度学习技术领域。具体实现方案为:获取道路图像;基于道路图像和预设的车道线分割模型,确定道路图像中的初始双车道线;基于初始双车道线中未黏连的车道线坐标,确定拟合双车道线;利用拟合双车道线对初始双车道线中的黏连区域进行处理,得到目标双车道线。本实现方式可以提高双线类别的车道线识别精准度。

用于识别语音的方法、装置、设备、介质和产品.pdf
本公开提供了用于识别语音的方法、装置、设备、介质和产品,涉及人工智能技术领域,尤其涉及语音技术领域。具体实现方案为:获取目标语音;基于目标语音和预设的语音识别模型,确定目标语音对应的用户特征向量集合;将用户特征向量集合中的各个用户特征向量拼接,得到目标特征向量;基于目标特征向量,确定目标语音对应的用户特征信息。本实现方式可以提高对用户特征的识别准确度。
车道线的识别方法和装置、存储介质及电子装置.pdf
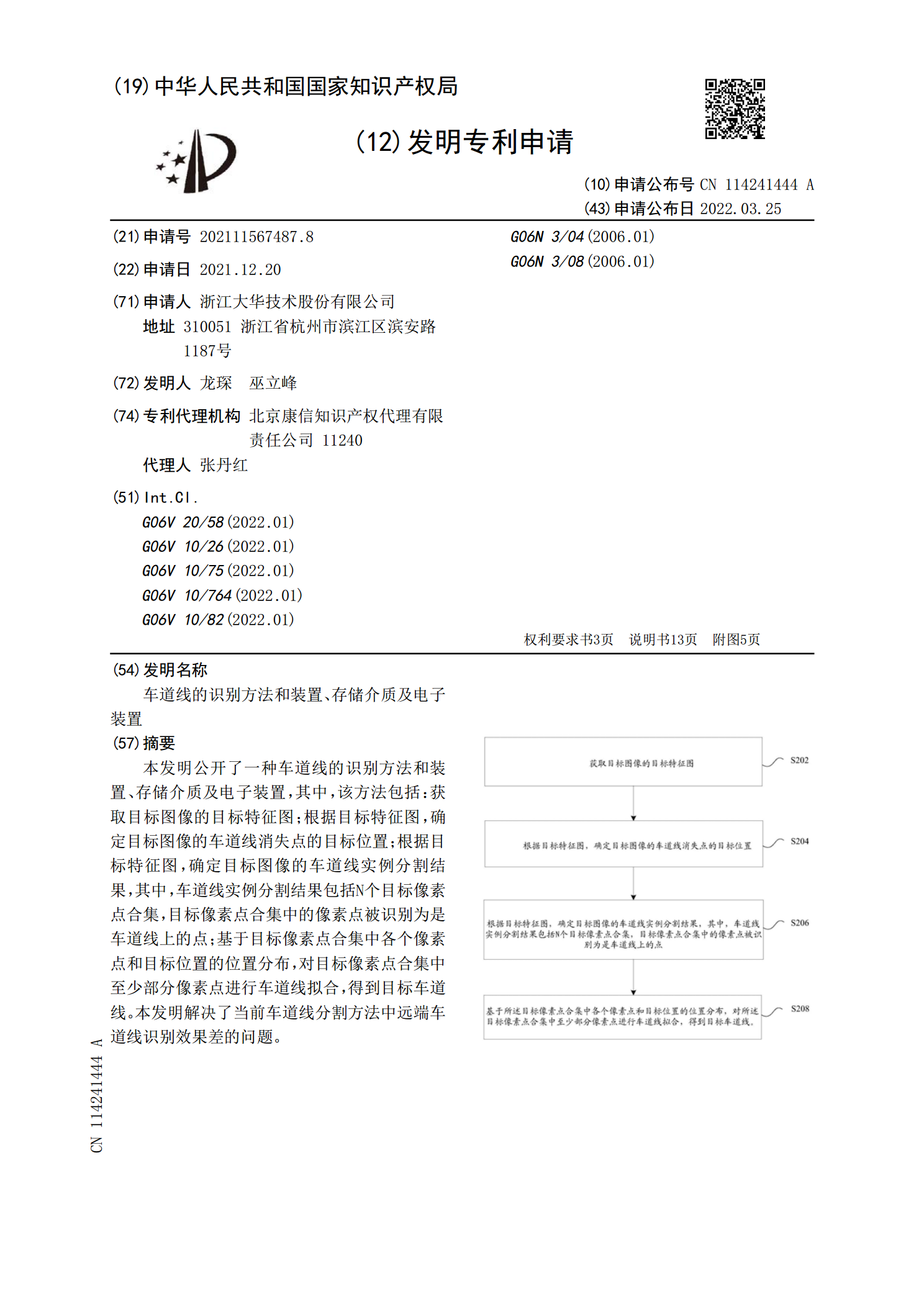
本发明公开了一种车道线的识别方法和装置、存储介质及电子装置,其中,该方法包括:获取目标图像的目标特征图;根据目标特征图,确定目标图像的车道线消失点的目标位置;根据目标特征图,确定目标图像的车道线实例分割结果,其中,车道线实例分割结果包括N个目标像素点合集,目标像素点合集中的像素点被识别为是车道线上的点;基于目标像素点合集中各个像素点和目标位置的位置分布,对目标像素点合集中至少部分像素点进行车道线拟合,得到目标车道线。本发明解决了当前车道线分割方法中远端车道线识别效果差的问题。

场地车道线识别测试方法、装置、设备及存储介质.pdf
本发明公开了一种场地车道线识别测试方法、装置、设备及存储介质,所述方法通过将传送带卷收装置安装在地面以下,获取当前测试场景,根据所述当前测试场景确定所需布设的车道线形式;根据所述车道线形式对所述传送带卷收装置的传送带进行调节,获得布设完成的测试车道线;控制所述传送带卷收装置的电机带动所述测试车道线运动至车辆测试的目标位置,控制试验车辆驾驶至所述测试车道线,基于高级驾驶辅助系统ADAS获得车道线识别测试结果,能够在同一路段实现不同车道线类型的模拟,实现不同车道线相关场景的测试,提升了车道线测试的准确性,节省
总平图中车道线的识别方法、装置、设备及存储介质.pdf
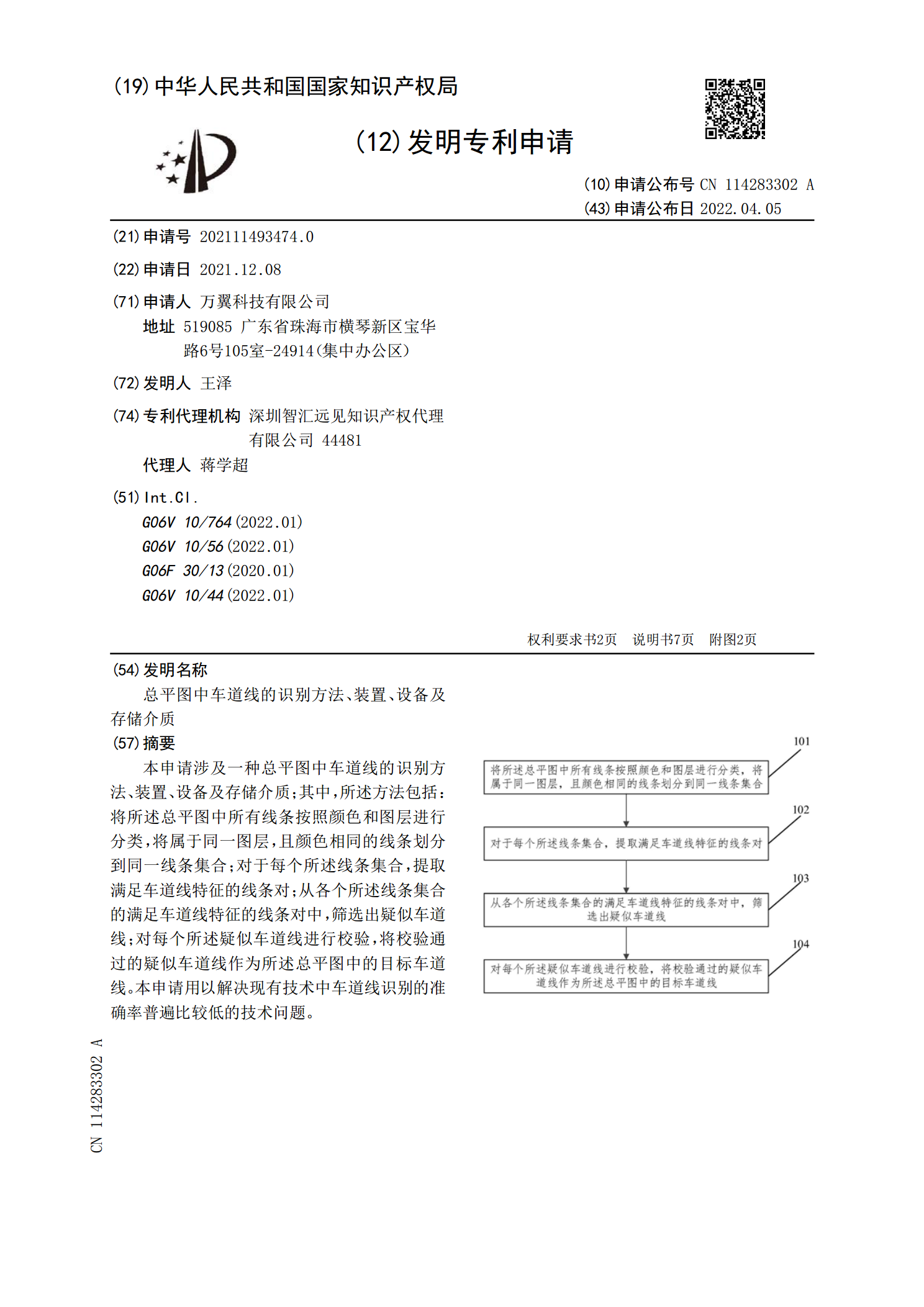
本申请涉及一种总平图中车道线的识别方法、装置、设备及存储介质;其中,所述方法包括:将所述总平图中所有线条按照颜色和图层进行分类,将属于同一图层,且颜色相同的线条划分到同一线条集合;对于每个所述线条集合,提取满足车道线特征的线条对;从各个所述线条集合的满足车道线特征的线条对中,筛选出疑似车道线;对每个所述疑似车道线进行校验,将校验通过的疑似车道线作为所述总平图中的目标车道线。本申请用以解决现有技术中车道线识别的准确率普遍比较低的技术问题。