
总平图中车道线的识别方法、装置、设备及存储介质.pdf

一条****杉淑

1/10

2/10

3/10

4/10
5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
总平图中车道线的识别方法、装置、设备及存储介质.pdf
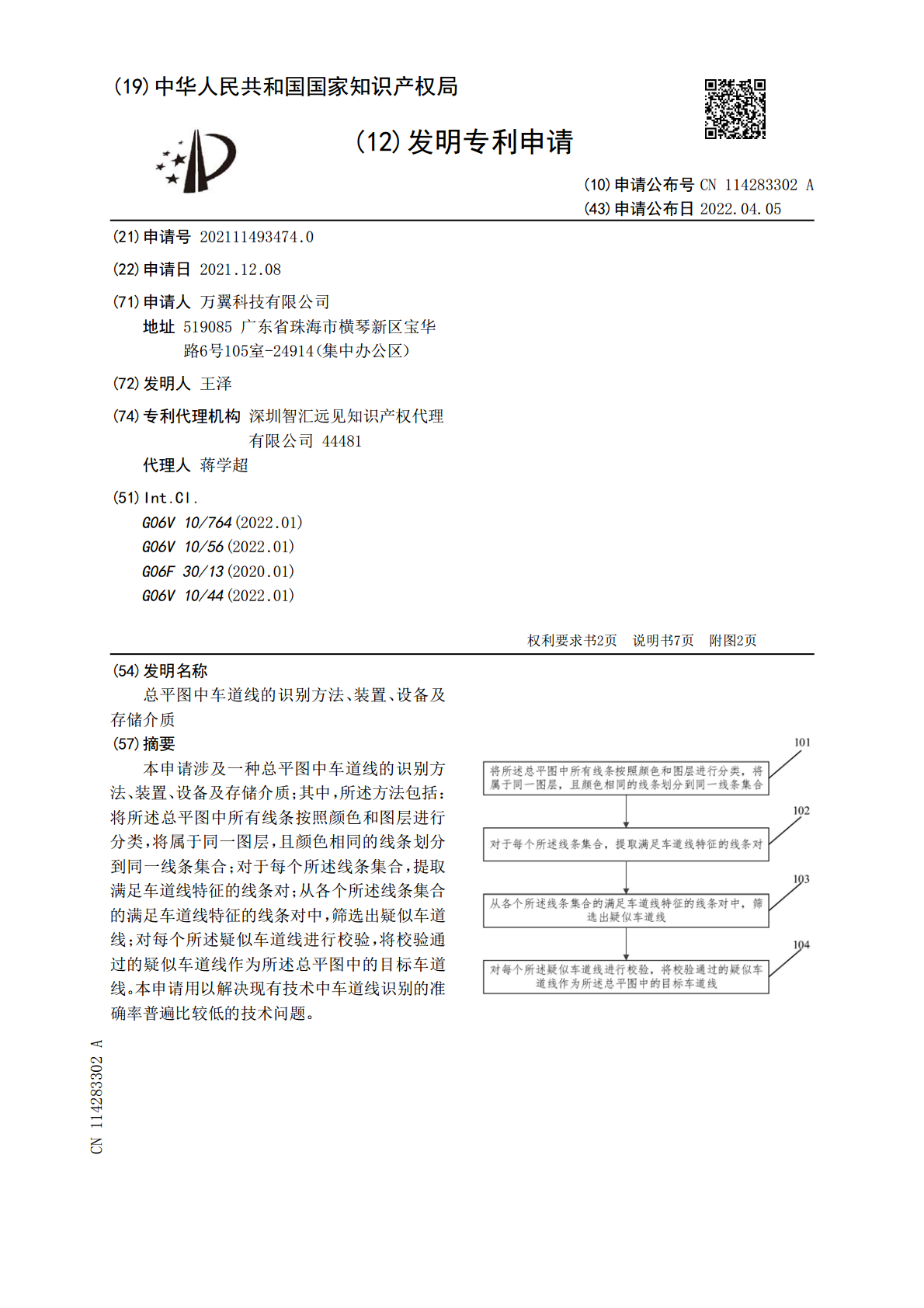
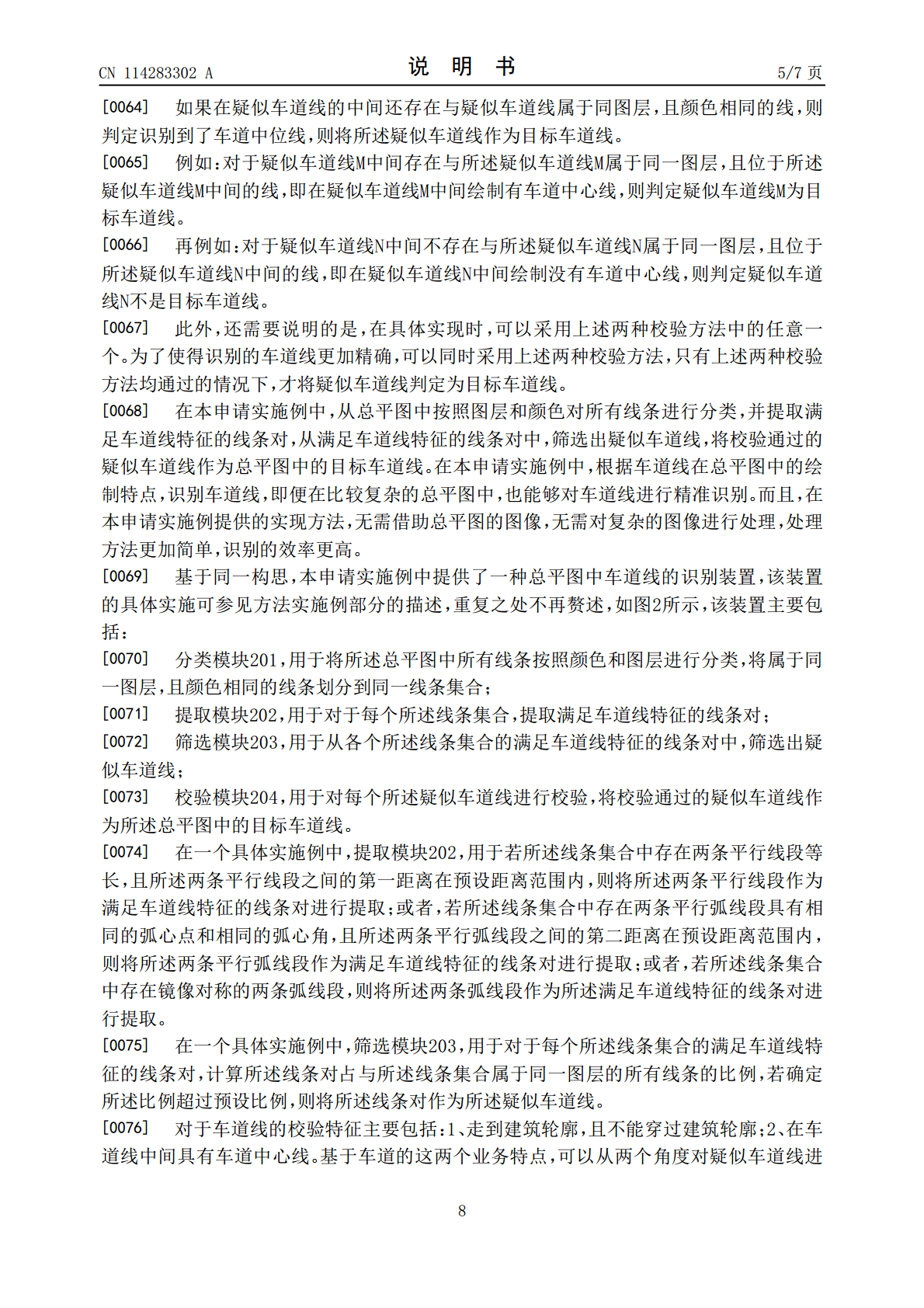
本申请涉及一种总平图中车道线的识别方法、装置、设备及存储介质;其中,所述方法包括:将所述总平图中所有线条按照颜色和图层进行分类,将属于同一图层,且颜色相同的线条划分到同一线条集合;对于每个所述线条集合,提取满足车道线特征的线条对;从各个所述线条集合的满足车道线特征的线条对中,筛选出疑似车道线;对每个所述疑似车道线进行校验,将校验通过的疑似车道线作为所述总平图中的目标车道线。本申请用以解决现有技术中车道线识别的准确率普遍比较低的技术问题。

地下车库图中车道线的识别方法、装置、设备及存储介质.pdf
本申请涉及一种地下车库图中车道线的识别方法、装置、设备及存储介质;其中,所述方法包括:将所述地下车库图中所有线条按照颜色和图层进行分类,将属于同一图层,且颜色相同的线条划分到同一线条集合;从所述地下车库图中,提取至少一个车道空间;其中,所述车道空间为包含有车道线的两个车位之间的空间或车位与墙之间的空间;根据每个所述线条集合中各线条穿过的车道空间的数量,筛选出疑似车道线集合;对所述疑似车道线集合中的每个疑似车道线进行校验,将校验通过的疑似车道线作为所述地下车库图中的目标车道线。本申请用以解决现有技术中车道线
车道线的识别方法和装置、存储介质及电子装置.pdf
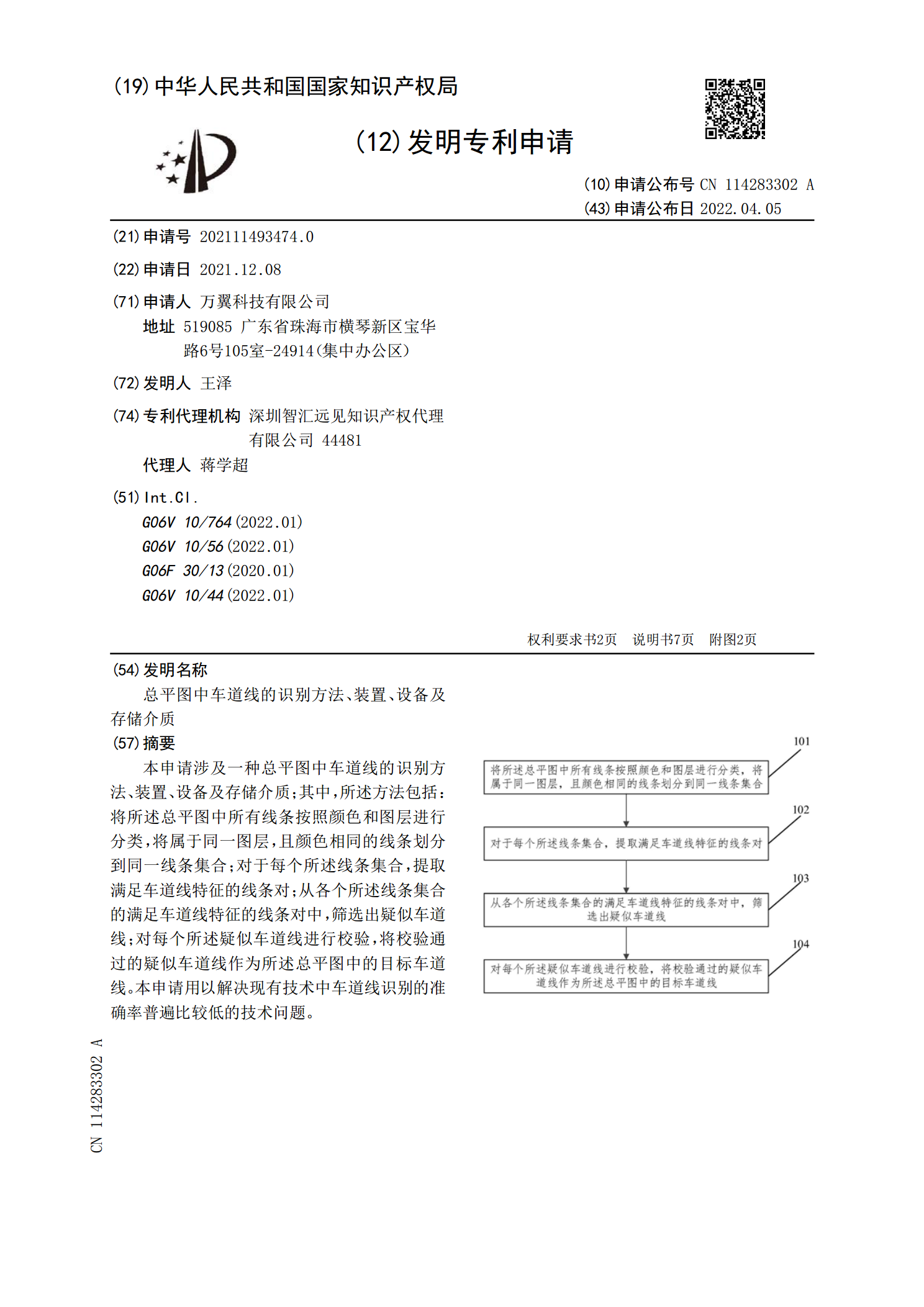
本发明公开了一种车道线的识别方法和装置、存储介质及电子装置,其中,该方法包括:获取目标图像的目标特征图;根据目标特征图,确定目标图像的车道线消失点的目标位置;根据目标特征图,确定目标图像的车道线实例分割结果,其中,车道线实例分割结果包括N个目标像素点合集,目标像素点合集中的像素点被识别为是车道线上的点;基于目标像素点合集中各个像素点和目标位置的位置分布,对目标像素点合集中至少部分像素点进行车道线拟合,得到目标车道线。本发明解决了当前车道线分割方法中远端车道线识别效果差的问题。
车道线的检测方法、装置、设备及存储介质.pdf
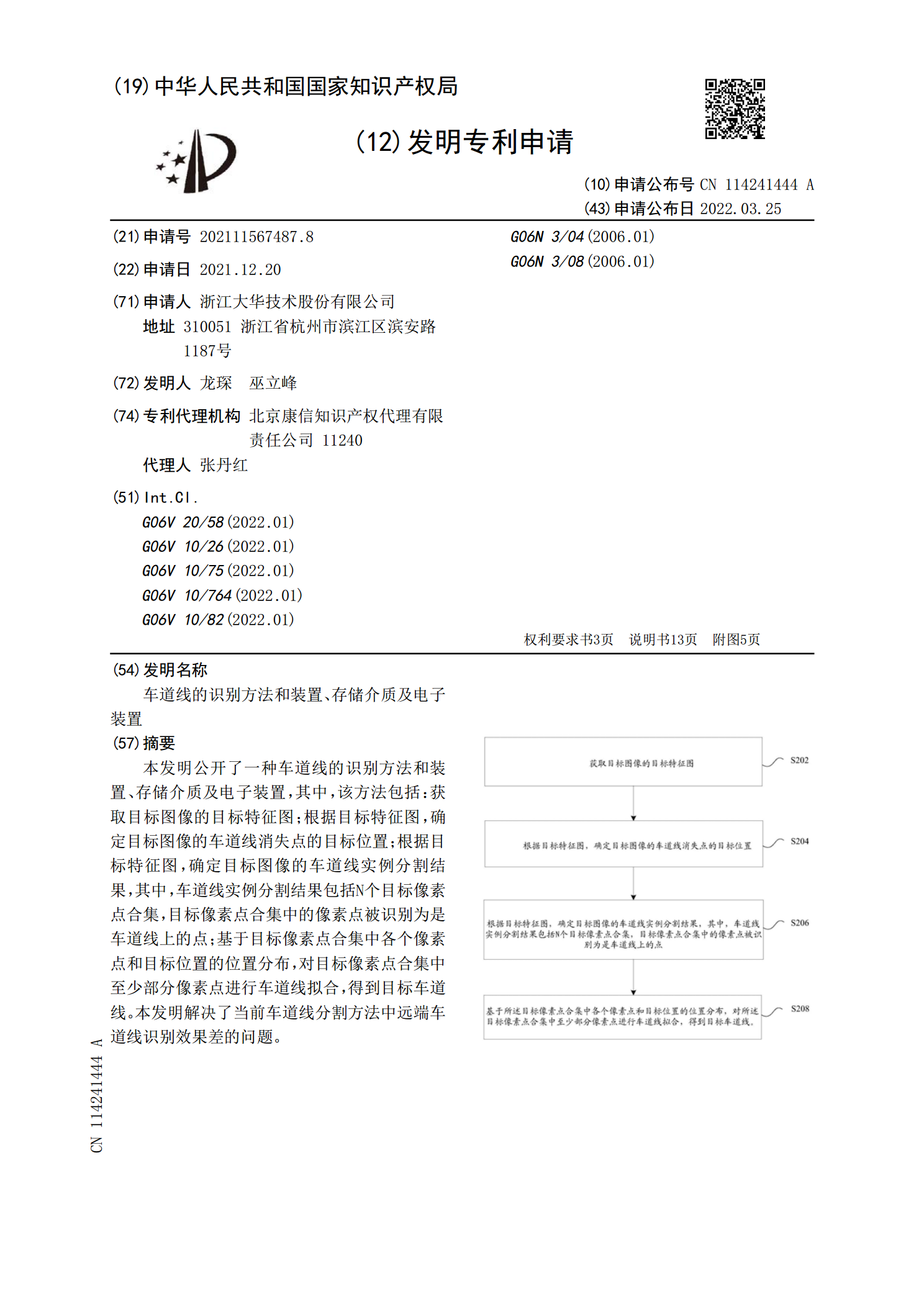
本发明涉及自动驾驶技术领域,公开了一种车道线的检测方法、装置、设备及存储介质,用于提高车道线检测的完整性。所述车道线的检测方法包括:获取至少一个角度相机拍摄的原始图像,并对原始图像进行图像特征抽取,得到目标图像特征信息;确定多个第一采样点,并通过目标图像特征信息进行每个第一采样点的特征收集,得到每个第一采样点对应的采样点特征信息;对每个第一采样点对应的采样点特征信息进行车道线相关性分值预测,得到每个第一采样点对应的车道线相关性分值,并通过每个第一采样点对应的车道线相关性分值确定多个第一采样点中的多个第二采
车道线的检测方法、装置、设备及存储介质.pdf
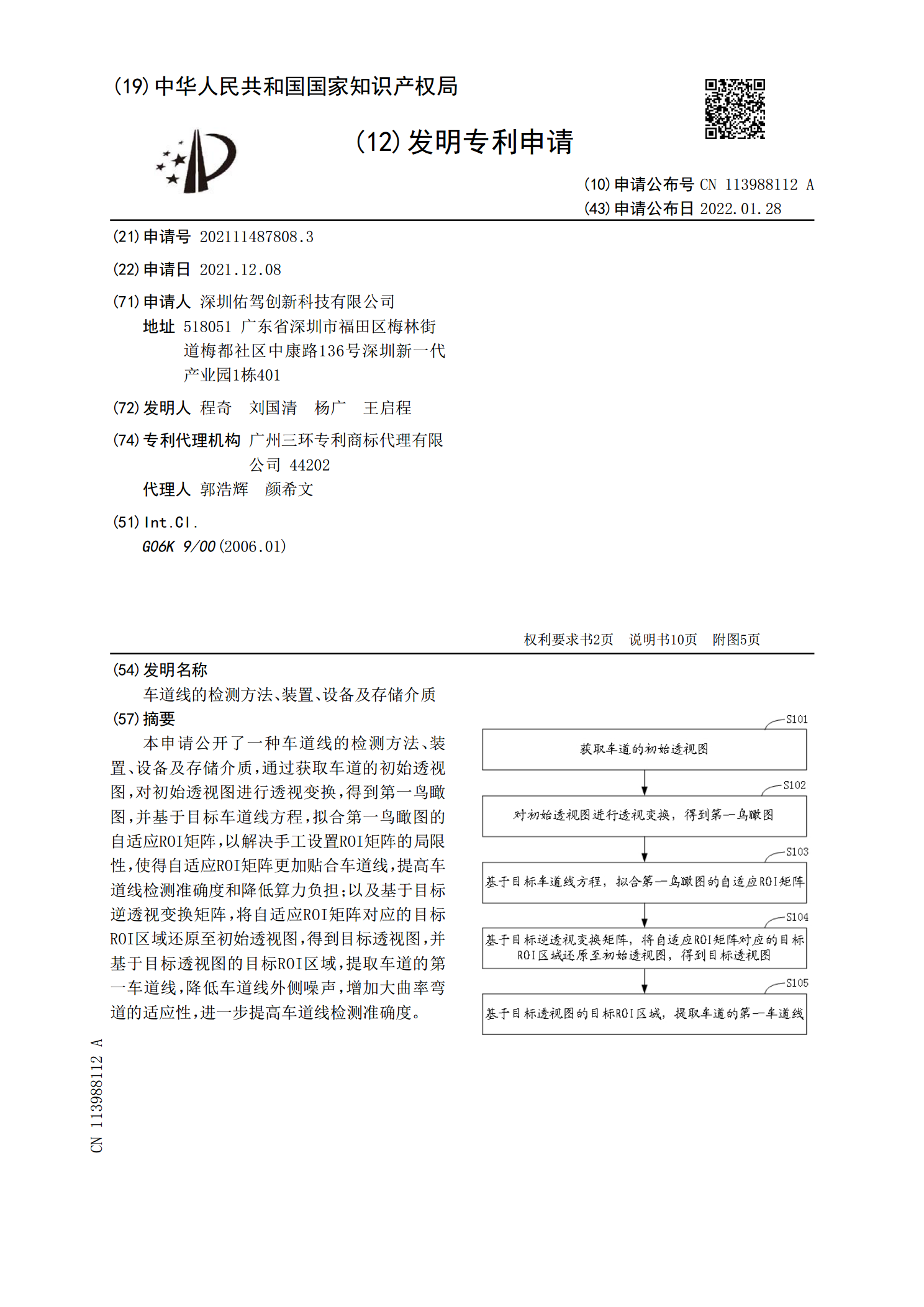
本申请公开了一种车道线的检测方法、装置、设备及存储介质,通过获取车道的初始透视图,对初始透视图进行透视变换,得到第一鸟瞰图,并基于目标车道线方程,拟合第一鸟瞰图的自适应ROI矩阵,以解决手工设置ROI矩阵的局限性,使得自适应ROI矩阵更加贴合车道线,提高车道线检测准确度和降低算力负担;以及基于目标逆透视变换矩阵,将自适应ROI矩阵对应的目标ROI区域还原至初始透视图,得到目标透视图,并基于目标透视图的目标ROI区域,提取车道的第一车道线,降低车道线外侧噪声,增加大曲率弯道的适应性,进一步提高车道线检测准确