
清洁控制方法、装置、清洁机器人以及存储介质.pdf

猫巷****志敏

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共37页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
清洁控制方法、装置、清洁机器人以及存储介质.pdf
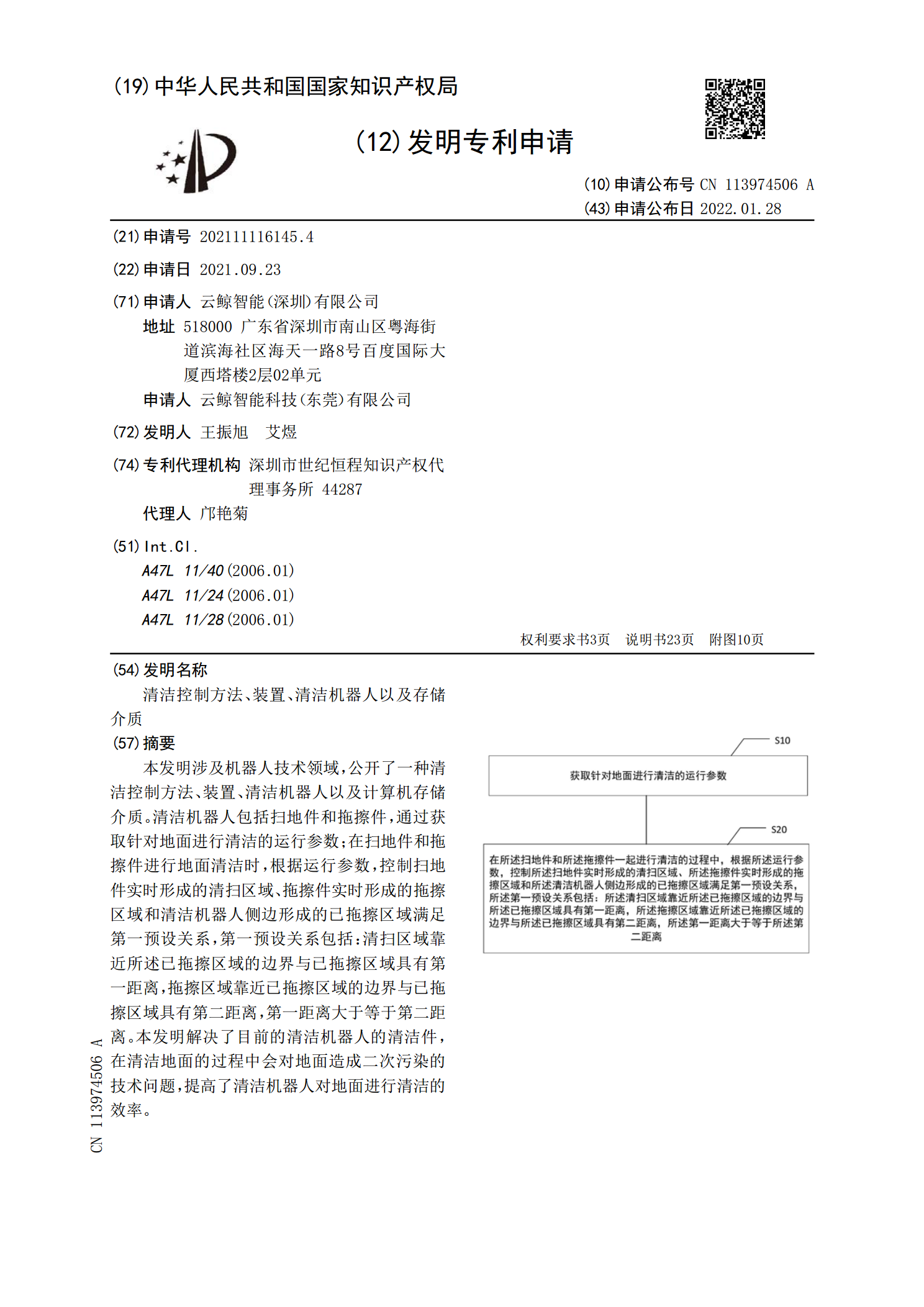
本发明涉及机器人技术领域,公开了一种清洁控制方法、装置、清洁机器人以及计算机存储介质。清洁机器人包括扫地件和拖擦件,通过获取针对地面进行清洁的运行参数;在扫地件和拖擦件进行地面清洁时,根据运行参数,控制扫地件实时形成的清扫区域、拖擦件实时形成的拖擦区域和清洁机器人侧边形成的已拖擦区域满足第一预设关系,第一预设关系包括:清扫区域靠近所述已拖擦区域的边界与已拖擦区域具有第一距离,拖擦区域靠近已拖擦区域的边界与已拖擦区域具有第二距离,第一距离大于等于第二距离。本发明解决了目前的清洁机器人的清洁件,在清洁地面的过
清洁机器人的清洁控制方法、清洁机器人以及存储介质.pdf
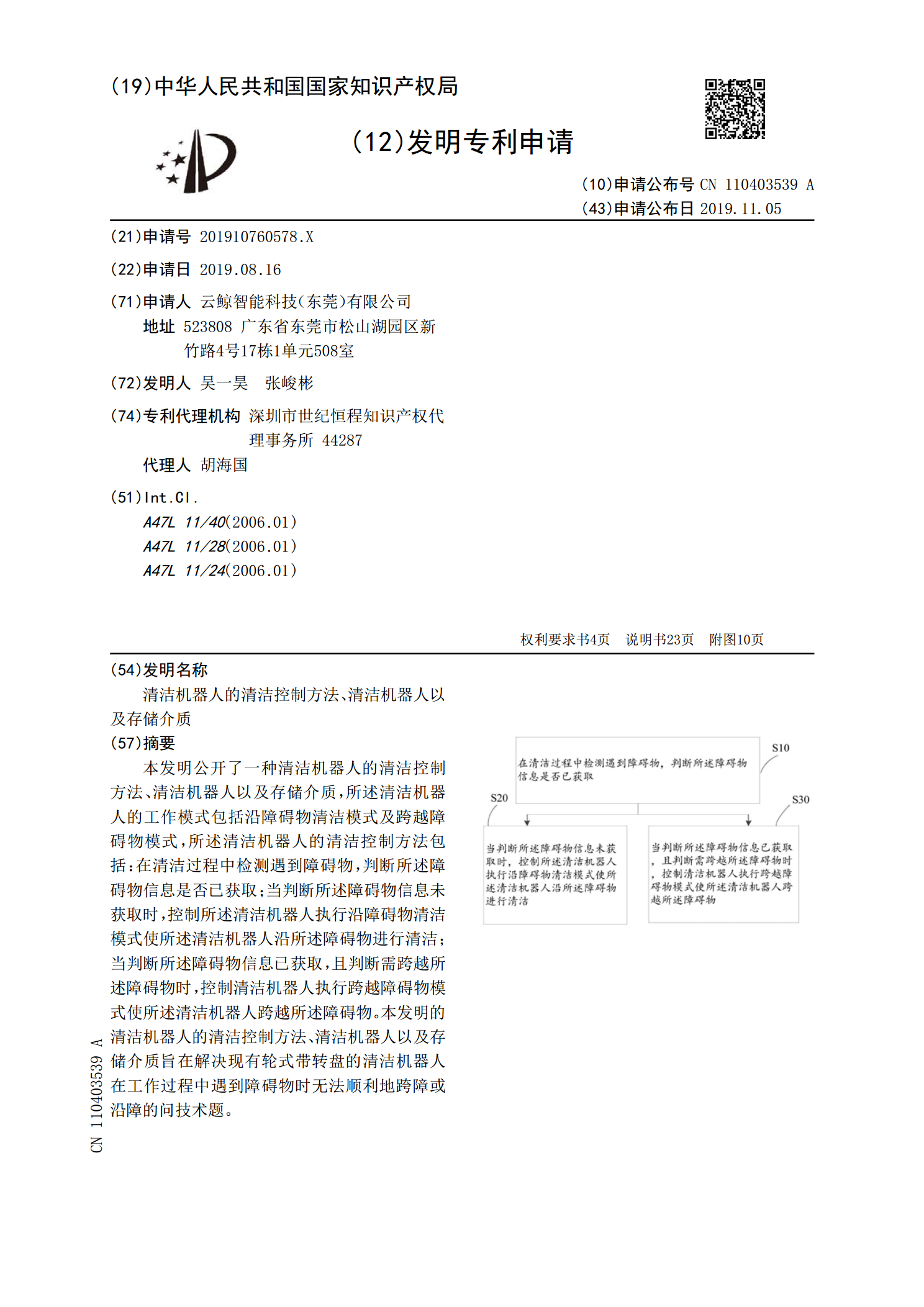
本发明公开了一种清洁机器人的清洁控制方法、清洁机器人以及存储介质,所述清洁机器人的工作模式包括沿障碍物清洁模式及跨越障碍物模式,所述清洁机器人的清洁控制方法包括:在清洁过程中检测遇到障碍物,判断所述障碍物信息是否已获取;当判断所述障碍物信息未获取时,控制所述清洁机器人执行沿障碍物清洁模式使所述清洁机器人沿所述障碍物进行清洁;当判断所述障碍物信息已获取,且判断需跨越所述障碍物时,控制清洁机器人执行跨越障碍物模式使所述清洁机器人跨越所述障碍物。本发明的清洁机器人的清洁控制方法、清洁机器人以及存储介质旨在解决现
清洁设备的控制方法、清洁设备以及存储介质.pdf
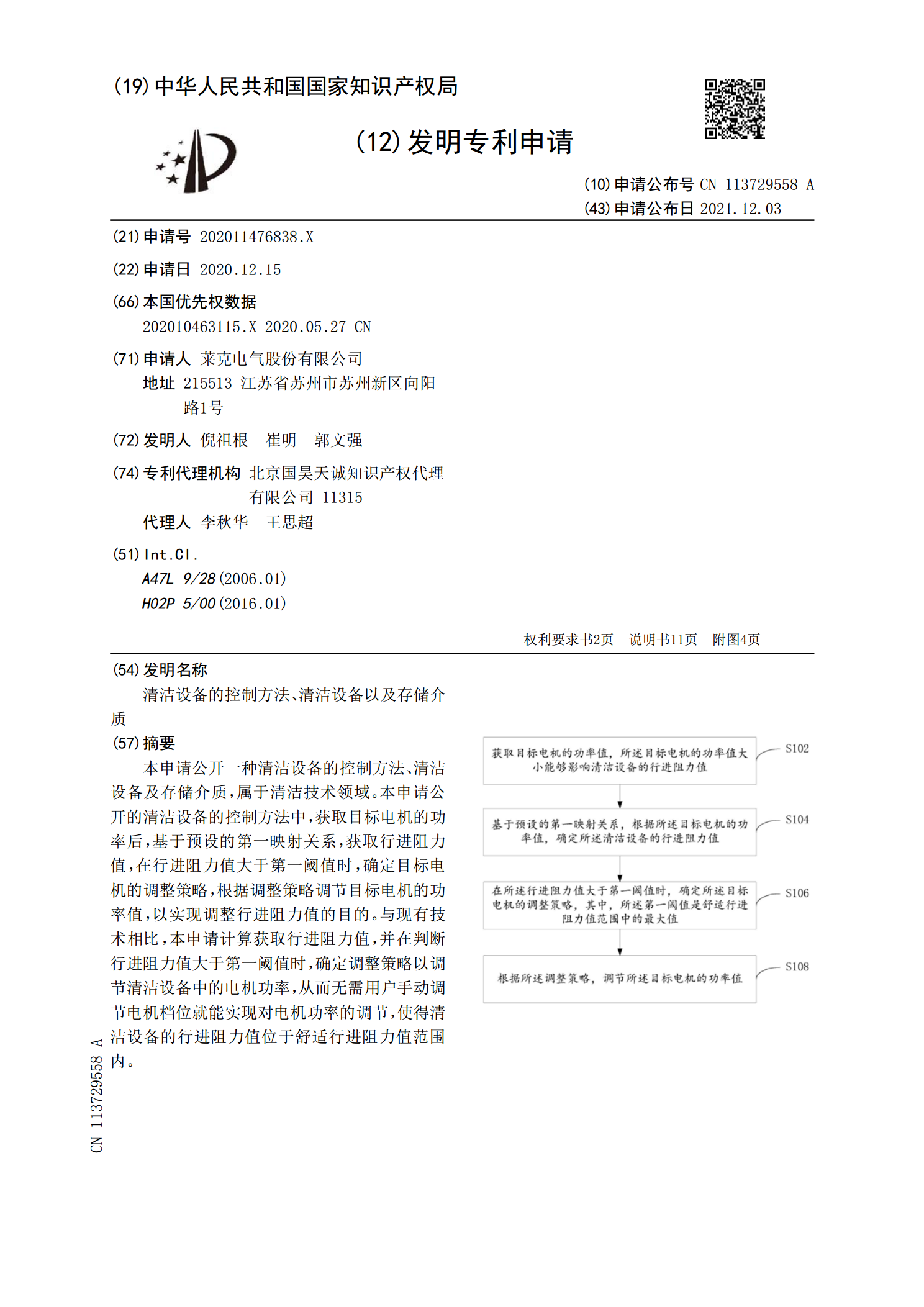
本申请公开一种清洁设备的控制方法、清洁设备及存储介质,属于清洁技术领域。本申请公开的清洁设备的控制方法中,获取目标电机的功率后,基于预设的第一映射关系,获取行进阻力值,在行进阻力值大于第一阈值时,确定目标电机的调整策略,根据调整策略调节目标电机的功率值,以实现调整行进阻力值的目的。与现有技术相比,本申请计算获取行进阻力值,并在判断行进阻力值大于第一阈值时,确定调整策略以调节清洁设备中的电机功率,从而无需用户手动调节电机档位就能实现对电机功率的调节,使得清洁设备的行进阻力值位于舒适行进阻力值范围内。

清洁设备的控制方法、清洁设备以及存储介质.pdf
本发明公开一种清洁设备的控制方法、清洁设备及存储介质,属于清洁技术领域。本发明公开的清洁设备的控制方法中,通过获取清洁设备的行进阻力值,在行进阻力值大于第一阈值时,根据行进阻力值,调整目标参数至目标值,以使得行进阻力值位于舒适行进阻力值范围内,以避免由于行进阻力值过大而导致清洁设备难以行进。其中,第一阈值是舒适行进阻力值范围内的最大值,目标参数是影响地刷口真空度的参数中的至少一种,目标值对应的地刷口真空度与行进阻力负相关,由此在第一行进阻力值大于第一阈值时,通过调整目标参数至目标值来降低地刷口的真空度,以
清洁机器人的控制方法、装置、清洁机器人及存储介质.pdf
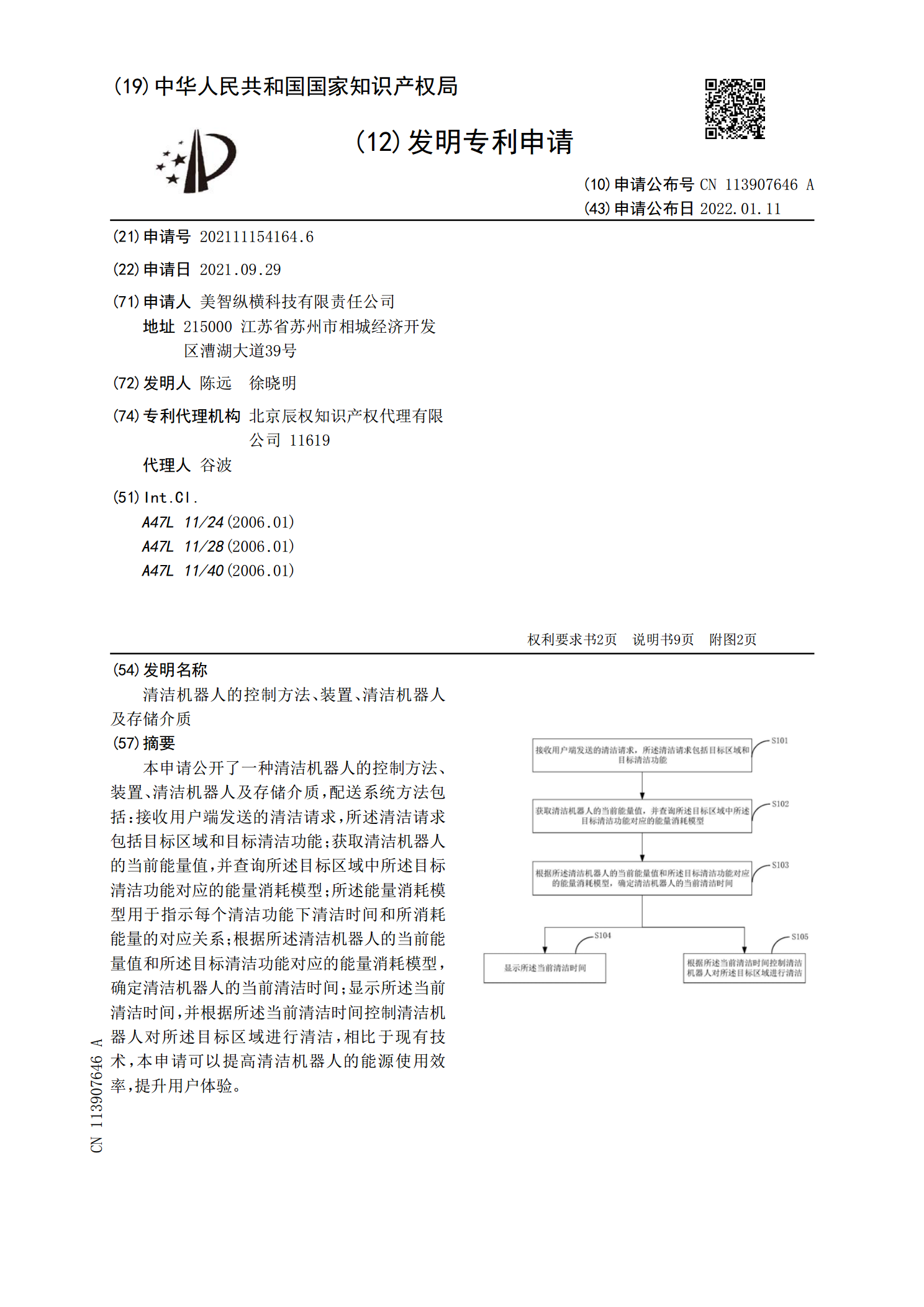
本申请公开了一种清洁机器人的控制方法、装置、清洁机器人及存储介质,配送系统方法包括:接收用户端发送的清洁请求,所述清洁请求包括目标区域和目标清洁功能;获取清洁机器人的当前能量值,并查询所述目标区域中所述目标清洁功能对应的能量消耗模型;所述能量消耗模型用于指示每个清洁功能下清洁时间和所消耗能量的对应关系;根据所述清洁机器人的当前能量值和所述目标清洁功能对应的能量消耗模型,确定清洁机器人的当前清洁时间;显示所述当前清洁时间,并根据所述当前清洁时间控制清洁机器人对所述目标区域进行清洁,相比于现有技术,本申请可以