
机械臂自动定位方法、装置、终端设备和可读存储介质.pdf

悠柔****找我

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

机械臂自动定位方法、装置、终端设备和可读存储介质.pdf
本申请公开了一种机械臂自动定位方法、装置、终端设备和可读存储介质,该方法应用于种植牙手术,包括在接收到第一指令时,根据所述机械臂的各个关节角的当前角度确定种植工具的当前位姿,所述种植工具安装于所述机械臂的末端;根据所述当前位姿确定I个变化位姿,其中,第i个变化位姿的目标坐标轴对应的角度与所述当前位姿的目标坐标轴对应的角度之差等于i与预定角度的乘积,I等于360除以所述预定角度,1≤i≤I;根据目标种植位对应的目标位姿从所述I个变化位姿中确定最优变化位姿;根据所述最优变化位姿控制所述机械臂将所述种植工具从所
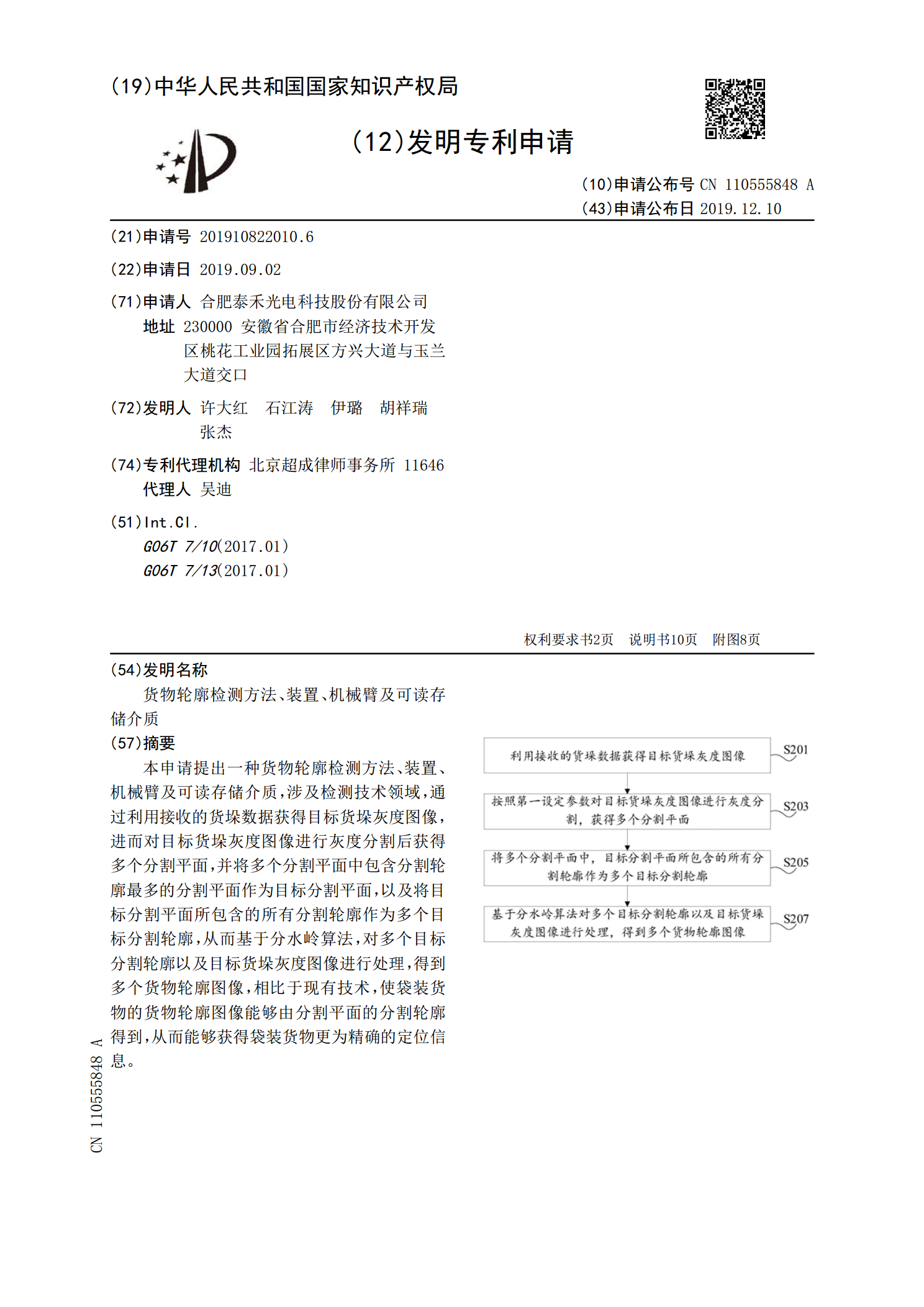
货物轮廓检测方法、装置、机械臂及可读存储介质.pdf
本申请提出一种货物轮廓检测方法、装置、机械臂及可读存储介质,涉及检测技术领域,通过利用接收的货垛数据获得目标货垛灰度图像,进而对目标货垛灰度图像进行灰度分割后获得多个分割平面,并将多个分割平面中包含分割轮廓最多的分割平面作为目标分割平面,以及将目标分割平面所包含的所有分割轮廓作为多个目标分割轮廓,从而基于分水岭算法,对多个目标分割轮廓以及目标货垛灰度图像进行处理,得到多个货物轮廓图像,相比于现有技术,使袋装货物的货物轮廓图像能够由分割平面的分割轮廓得到,从而能够获得袋装货物更为精确的定位信息。

地图定位方法、装置、计算机可读存储介质及终端设备.pdf
本申请属于定位技术领域,尤其涉及一种地图定位方法、装置、计算机可读存储介质及终端设备。所述方法包括:通过摄像装置获取目标运动装置在地图上行进的全局图像;在全局图像中对地图的标识码进行检测,并根据地图的标识码检测结果确定摄像装置距离地图的高度;在全局图像中确定地图的轮廓的角点位置,并根据角点位置和预设的实际地图尺寸确定全局图像的比例尺;在全局图像中对目标运动装置的标识码进行检测,并根据目标运动装置的标识码检测结果确定目标运动装置的标识码中心点;根据目标运动装置的标识码中心点、地图的轮廓的角点位置、摄像装置距
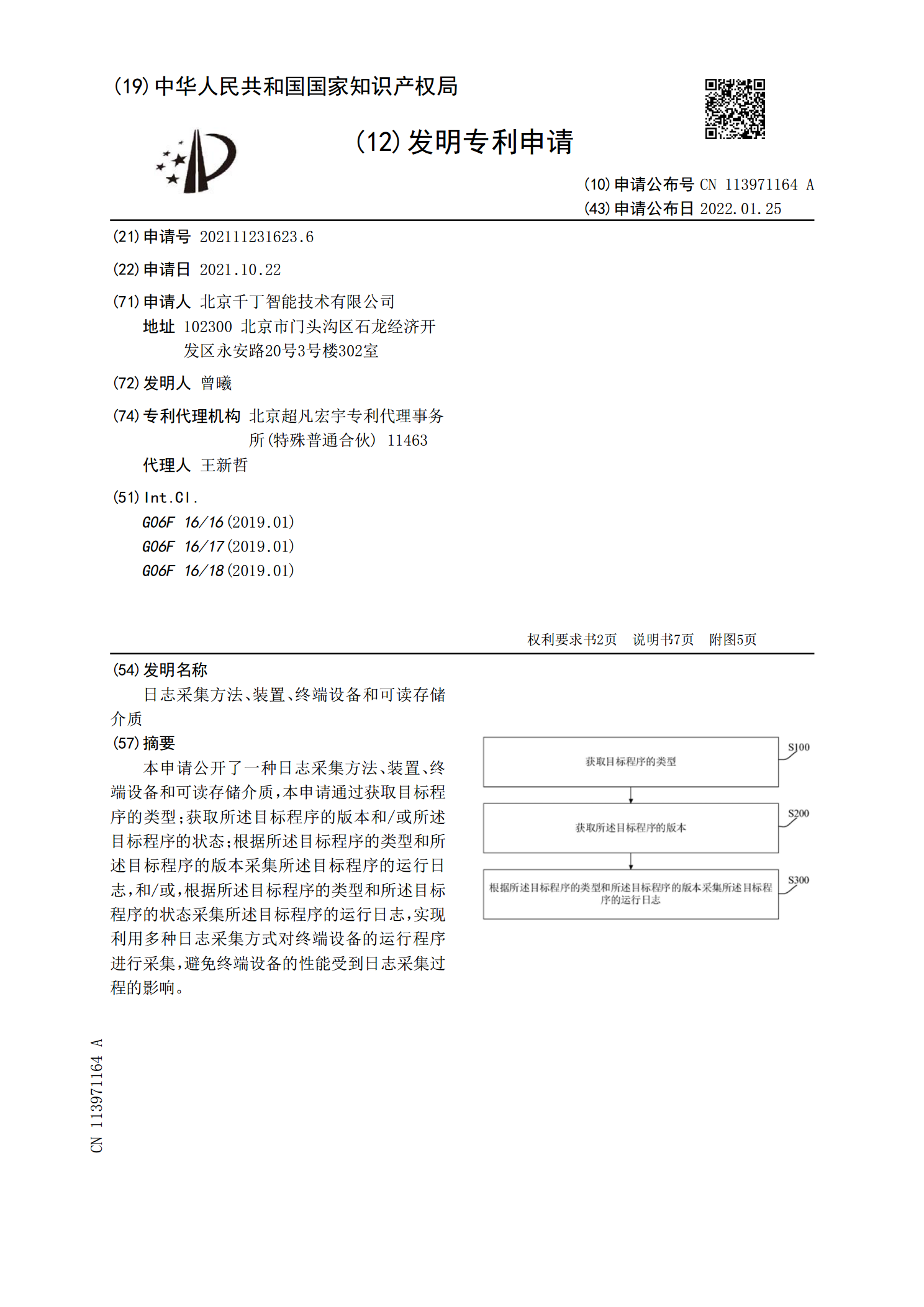
日志采集方法、装置、终端设备和可读存储介质.pdf
本申请公开了一种日志采集方法、装置、终端设备和可读存储介质,本申请通过获取目标程序的类型;获取所述目标程序的版本和/或所述目标程序的状态;根据所述目标程序的类型和所述目标程序的版本采集所述目标程序的运行日志,和/或,根据所述目标程序的类型和所述目标程序的状态采集所述目标程序的运行日志,实现利用多种日志采集方式对终端设备的运行程序进行采集,避免终端设备的性能受到日志采集过程的影响。
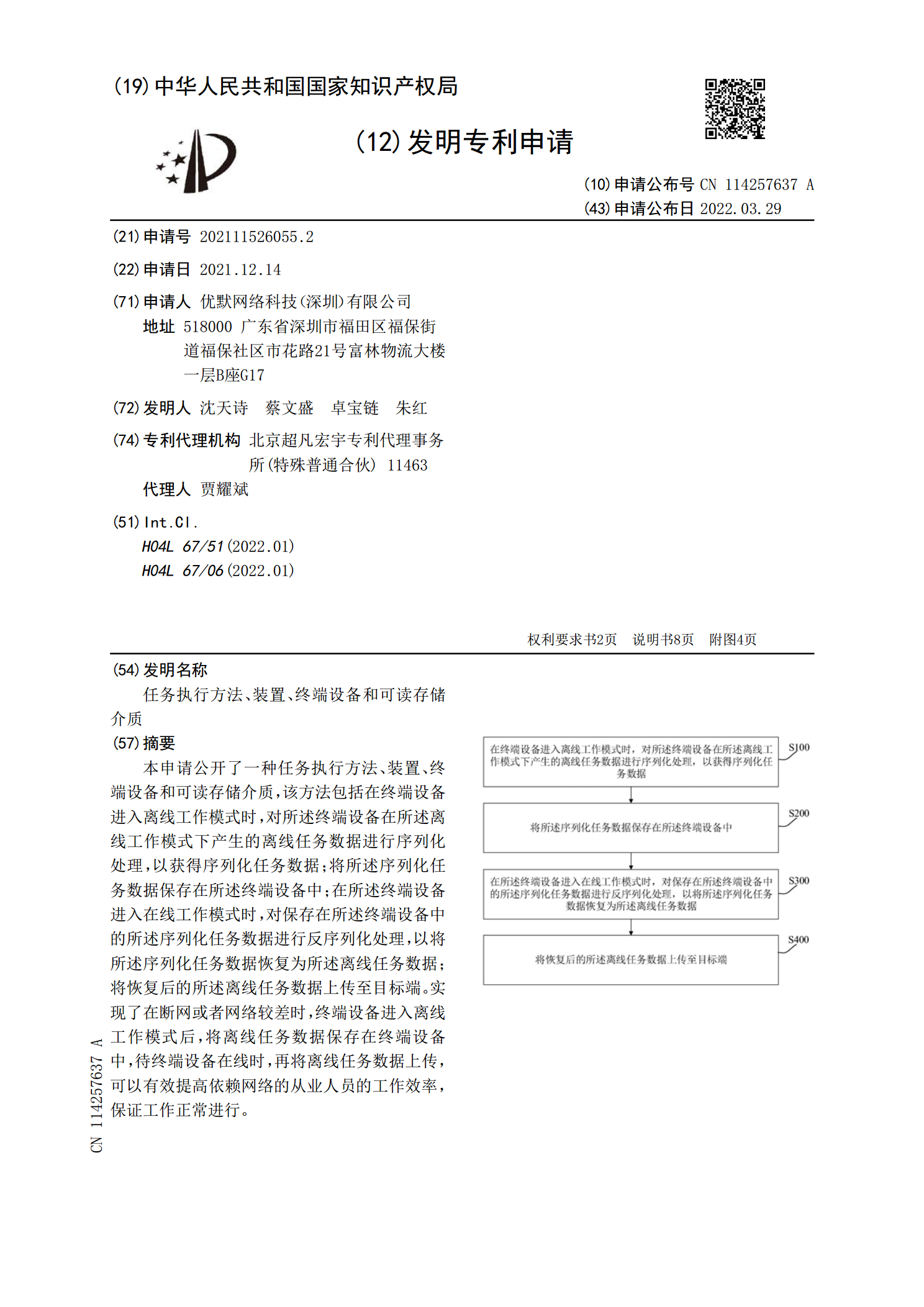
任务执行方法、装置、终端设备和可读存储介质.pdf
本申请公开了一种任务执行方法、装置、终端设备和可读存储介质,该方法包括在终端设备进入离线工作模式时,对所述终端设备在所述离线工作模式下产生的离线任务数据进行序列化处理,以获得序列化任务数据;将所述序列化任务数据保存在所述终端设备中;在所述终端设备进入在线工作模式时,对保存在所述终端设备中的所述序列化任务数据进行反序列化处理,以将所述序列化任务数据恢复为所述离线任务数据;将恢复后的所述离线任务数据上传至目标端。实现了在断网或者网络较差时,终端设备进入离线工作模式后,将离线任务数据保存在终端设备中,待终端设备