
一种基于车载单目摄像机的行人距离测量方法.pdf

Ke****67

1/7
2/7
3/7
4/7
5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于车载单目摄像机的行人距离测量方法.pdf
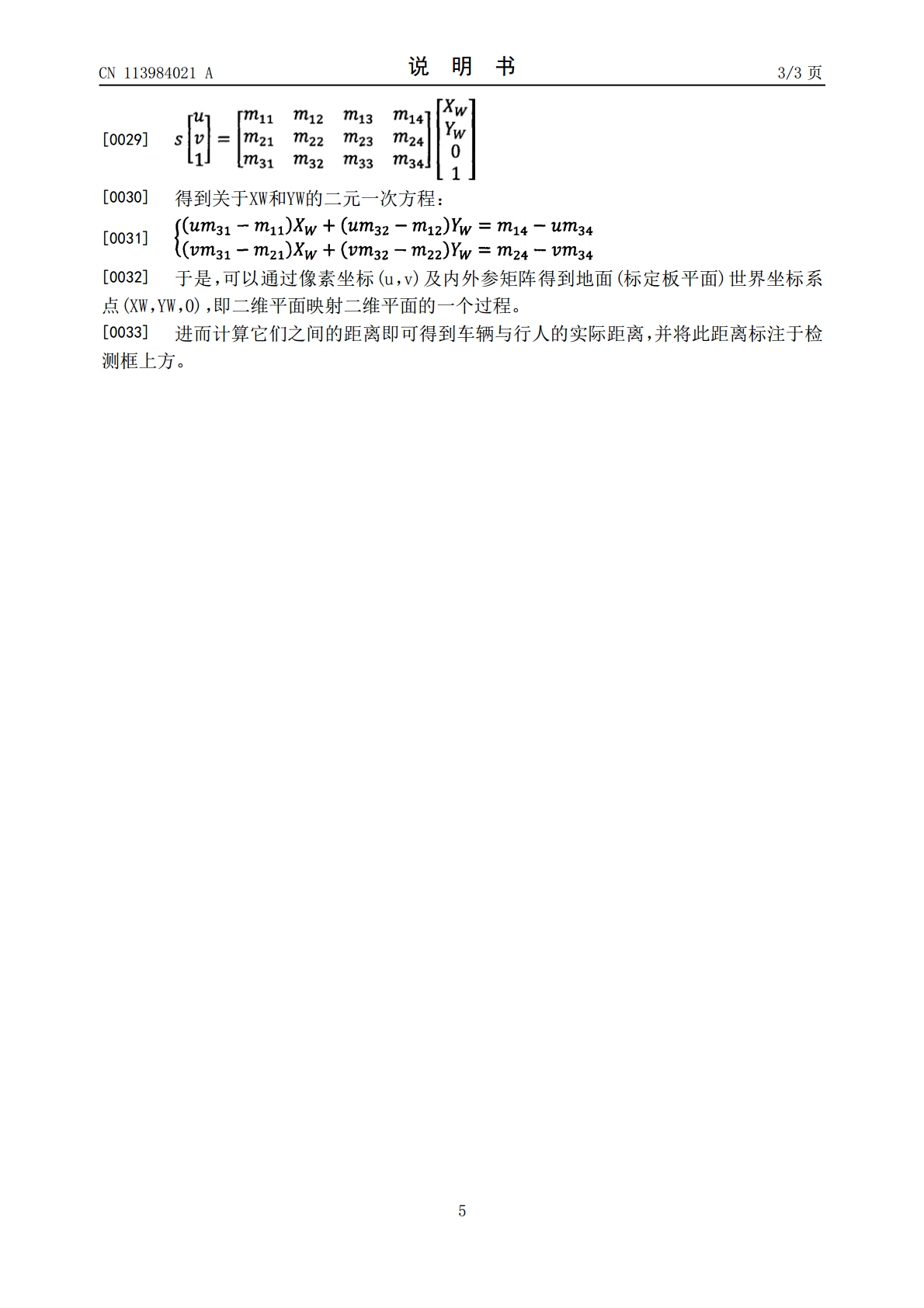
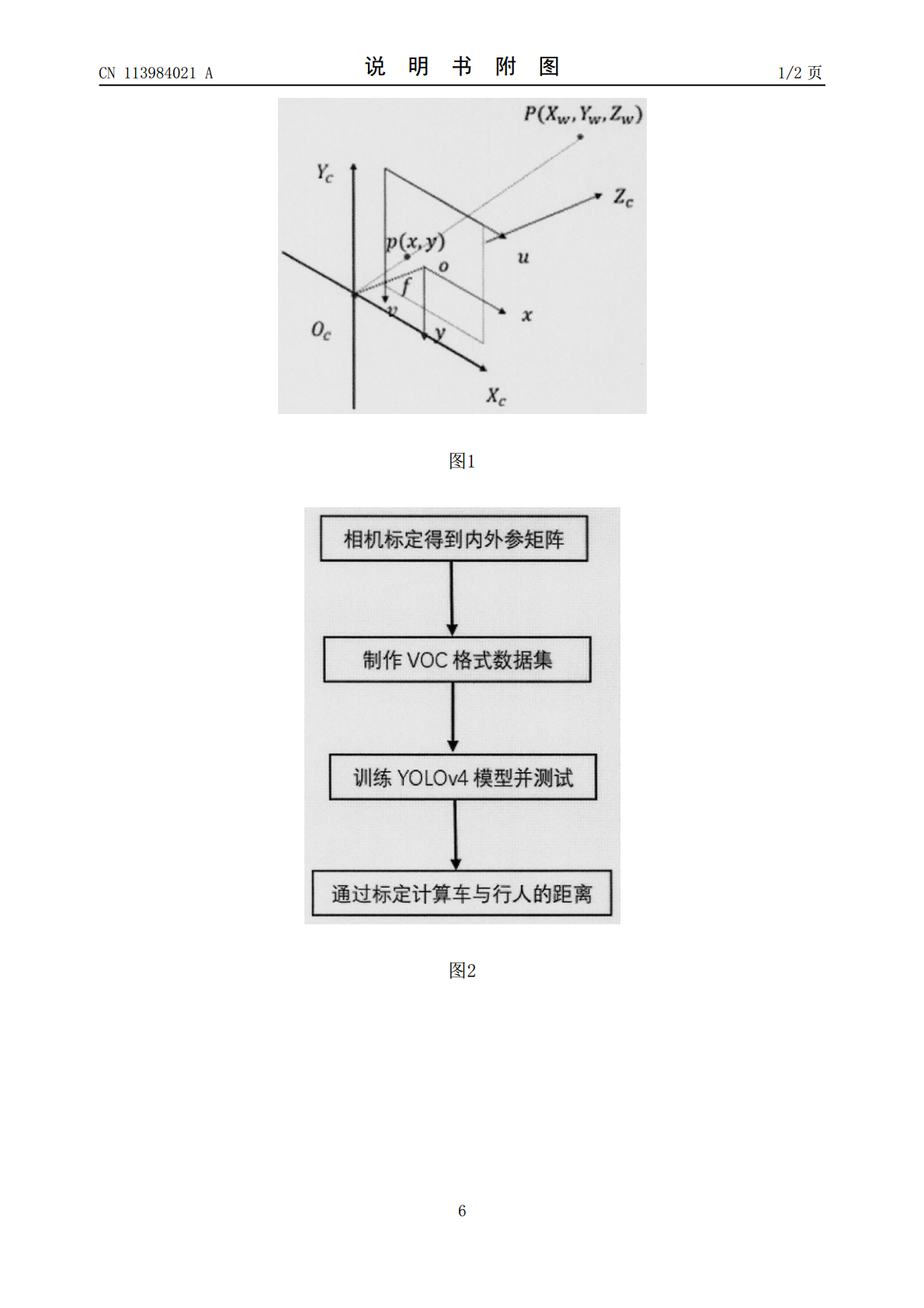
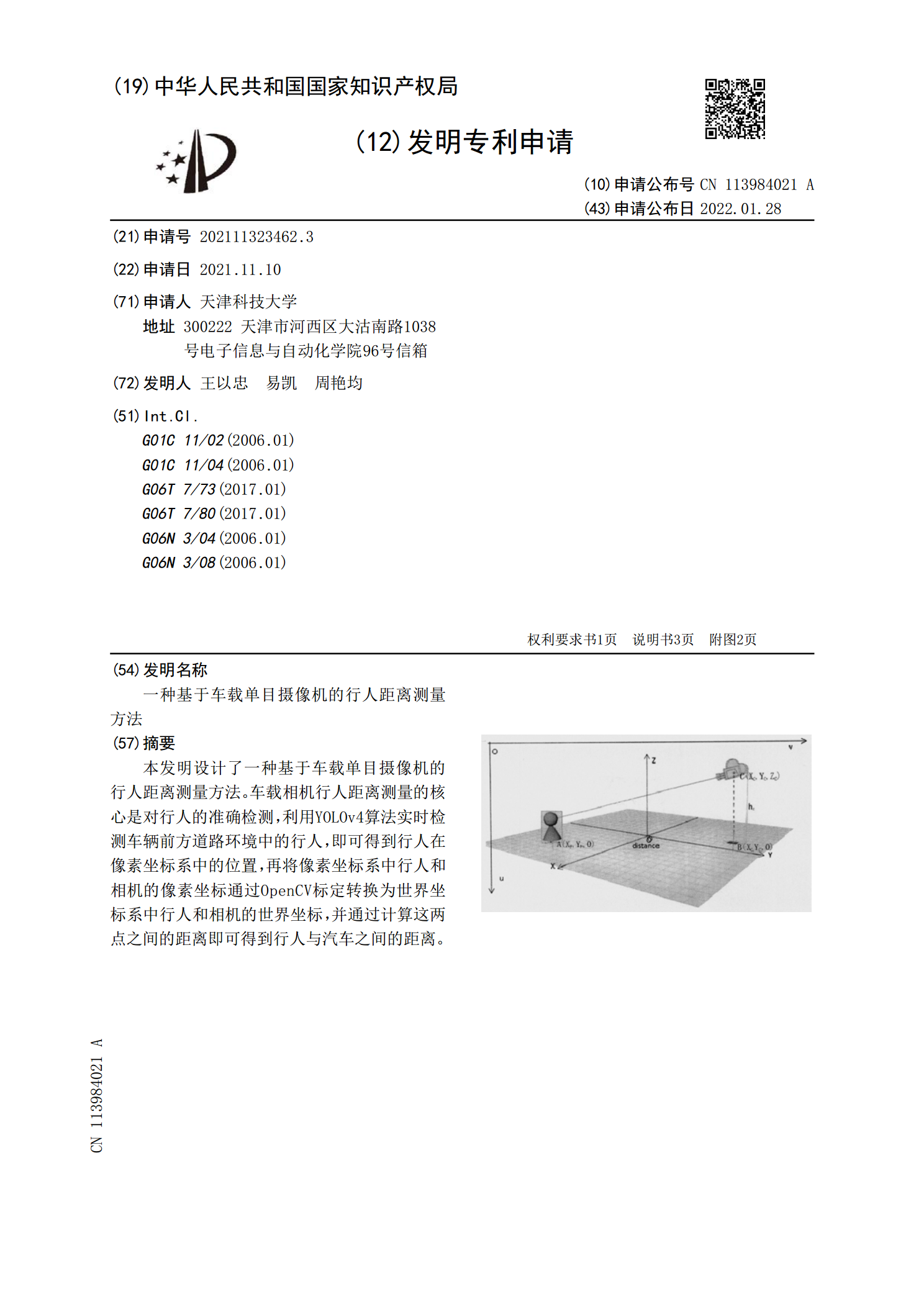
本发明设计了一种基于车载单目摄像机的行人距离测量方法。车载相机行人距离测量的核心是对行人的准确检测,利用YOLOv4算法实时检测车辆前方道路环境中的行人,即可得到行人在像素坐标系中的位置,再将像素坐标系中行人和相机的像素坐标通过OpenCV标定转换为世界坐标系中行人和相机的世界坐标,并通过计算这两点之间的距离即可得到行人与汽车之间的距离。
一种基于单目摄像机的高精度行人流量统计方法.pdf
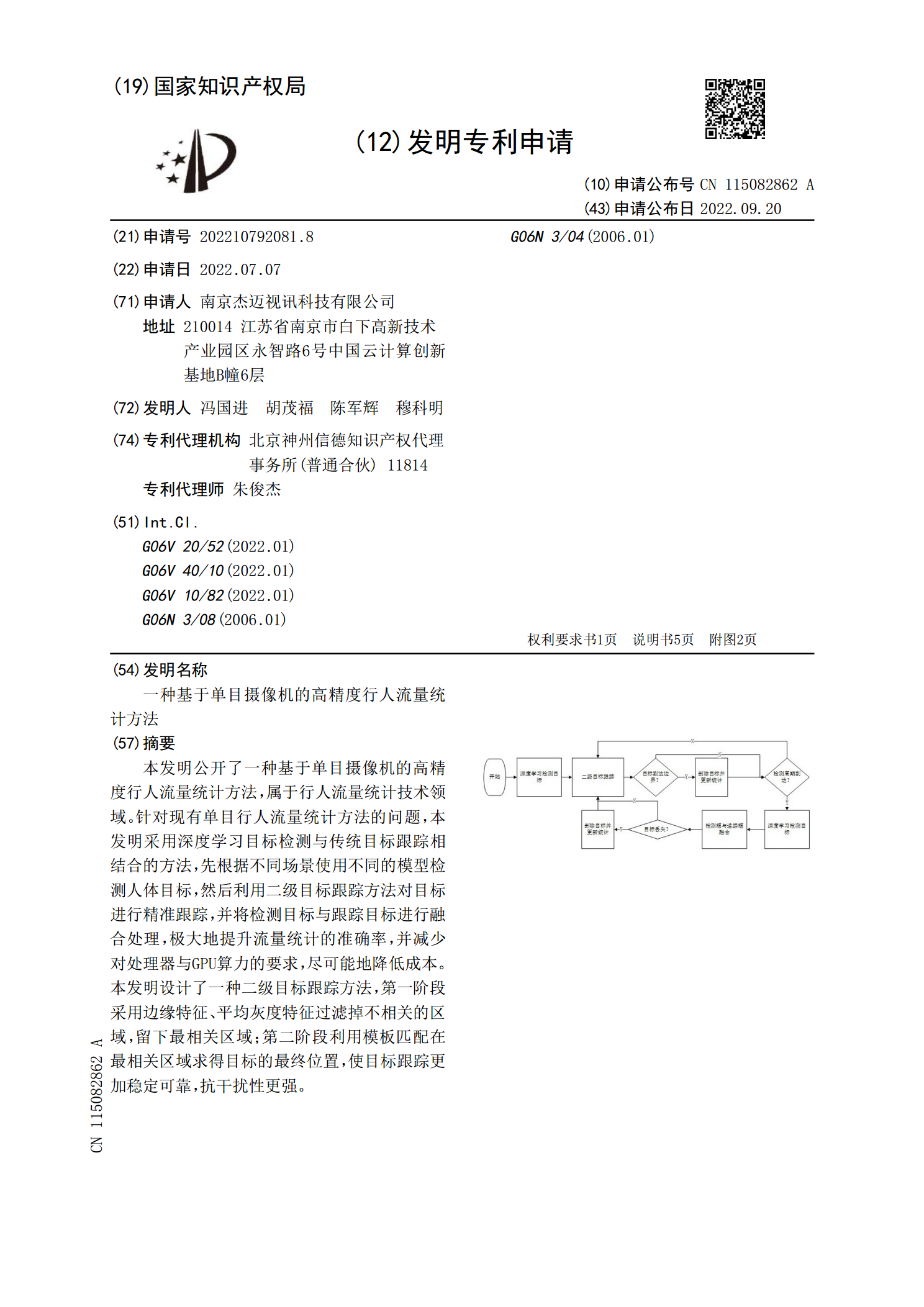
本发明公开了一种基于单目摄像机的高精度行人流量统计方法,属于行人流量统计技术领域。针对现有单目行人流量统计方法的问题,本发明采用深度学习目标检测与传统目标跟踪相结合的方法,先根据不同场景使用不同的模型检测人体目标,然后利用二级目标跟踪方法对目标进行精准跟踪,并将检测目标与跟踪目标进行融合处理,极大地提升流量统计的准确率,并减少对处理器与GPU算力的要求,尽可能地降低成本。本发明设计了一种二级目标跟踪方法,第一阶段采用边缘特征、平均灰度特征过滤掉不相关的区域,留下最相关区域;第二阶段利用模板匹配在最相关区域
一种基于单目摄像头的移动目标距离与高度的测量方法.pdf
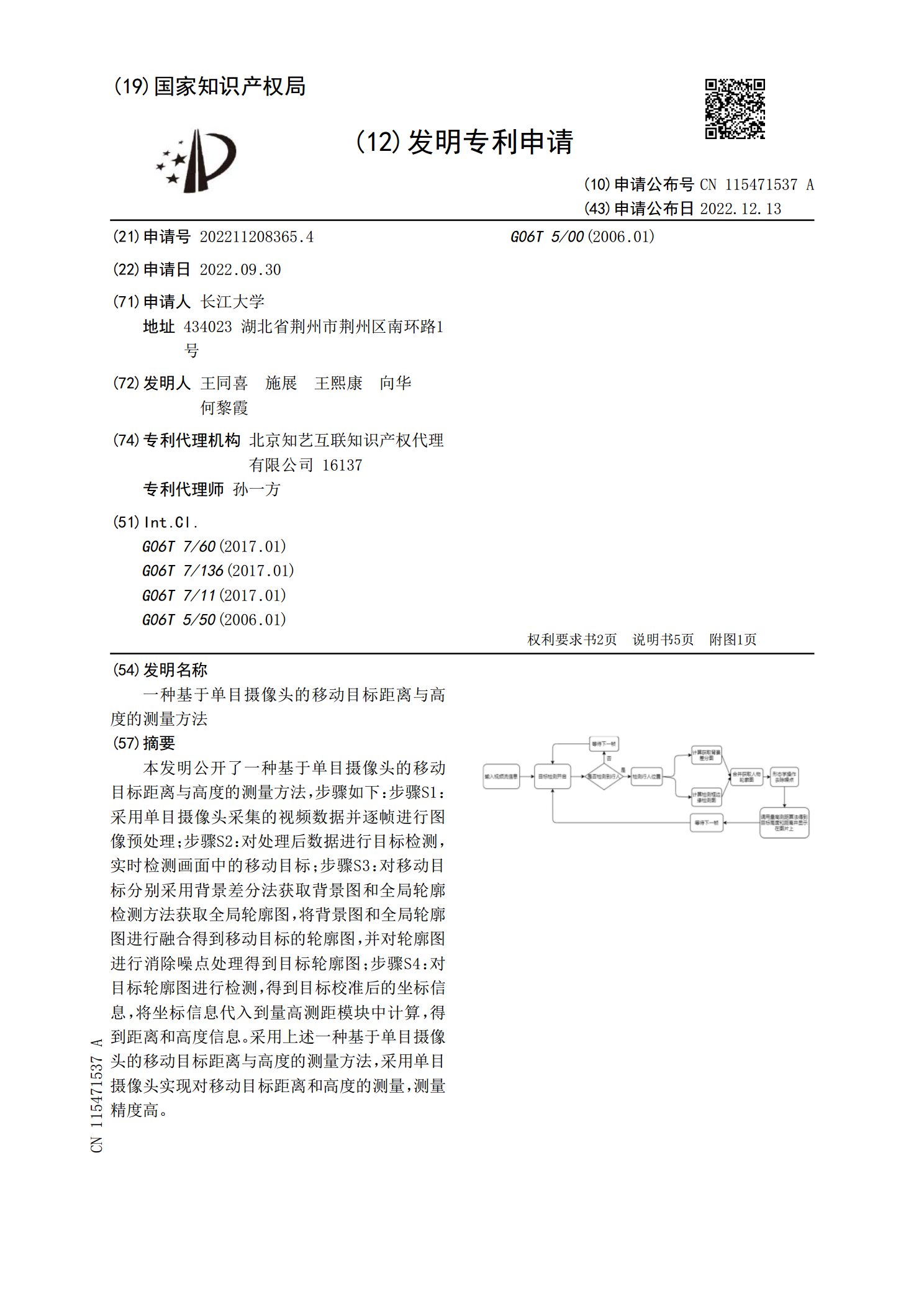
本发明公开了一种基于单目摄像头的移动目标距离与高度的测量方法,步骤如下:步骤S1:采用单目摄像头采集的视频数据并逐帧进行图像预处理;步骤S2:对处理后数据进行目标检测,实时检测画面中的移动目标;步骤S3:对移动目标分别采用背景差分法获取背景图和全局轮廓检测方法获取全局轮廓图,将背景图和全局轮廓图进行融合得到移动目标的轮廓图,并对轮廓图进行消除噪点处理得到目标轮廓图;步骤S4:对目标轮廓图进行检测,得到目标校准后的坐标信息,将坐标信息代入到量高测距模块中计算,得到距离和高度信息。采用上述一种基于单目摄像头的
一种基于单目摄像机的光照估计方法.pdf
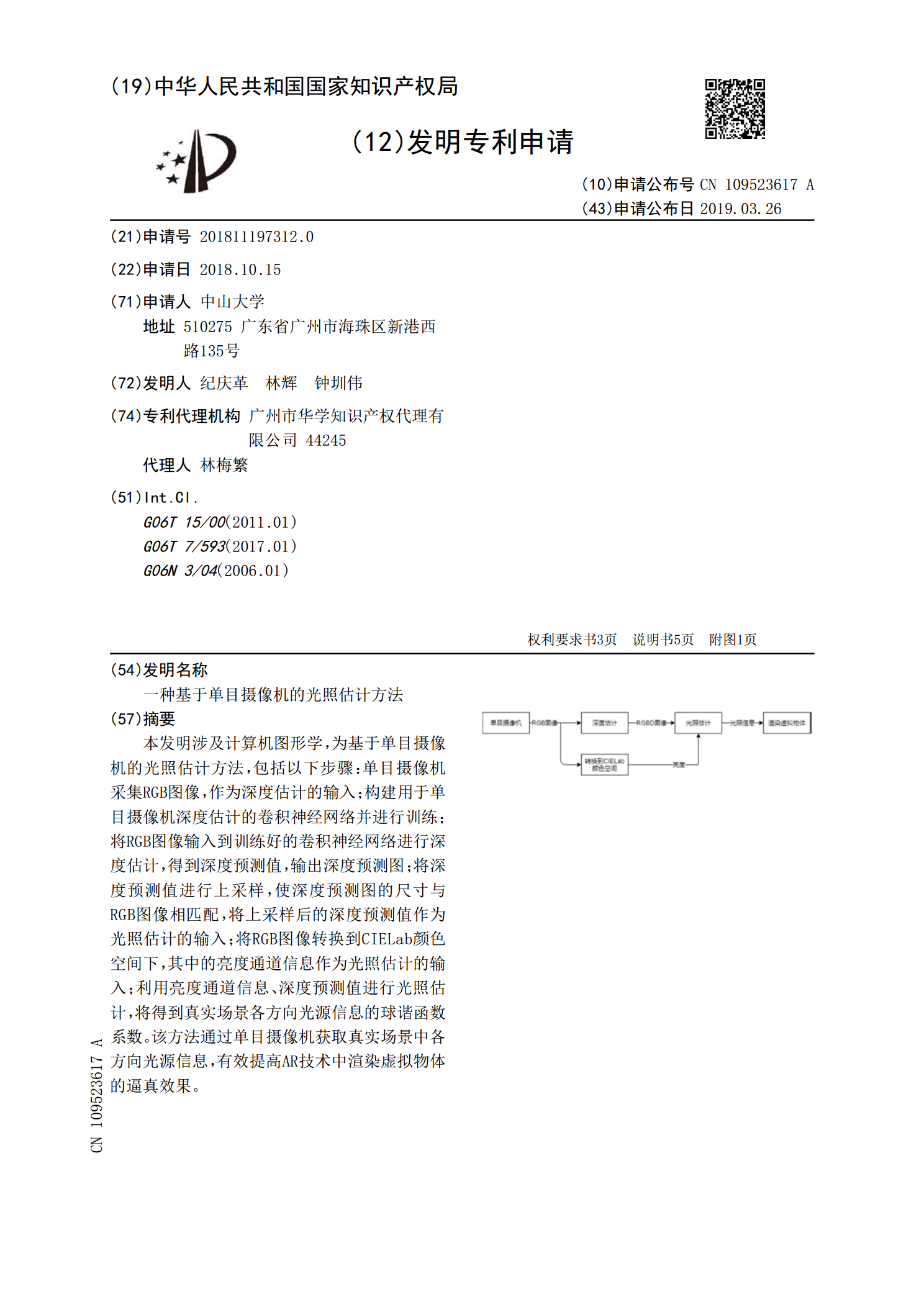
本发明涉及计算机图形学,为基于单目摄像机的光照估计方法,包括以下步骤:单目摄像机采集RGB图像,作为深度估计的输入;构建用于单目摄像机深度估计的卷积神经网络并进行训练;将RGB图像输入到训练好的卷积神经网络进行深度估计,得到深度预测值,输出深度预测图;将深度预测值进行上采样,使深度预测图的尺寸与RGB图像相匹配,将上采样后的深度预测值作为光照估计的输入;将RGB图像转换到CIELab颜色空间下,其中的亮度通道信息作为光照估计的输入;利用亮度通道信息、深度预测值进行光照估计,将得到真实场景各方向光源信息的球

一种基于单目相机的AGV行人跟随方法.pdf
本发明涉及一种基于单目相机的AGV行人跟随方法,包括以下步骤:1)检测行人目标:根据部署在上位机的行人检测模型得到行人目标检测框;2)利用单目相机标定单应矩阵:获取三维世界坐标系到二维像素坐标系的单应矩阵H;3)行人坐标解算:计算三维世界坐标系下行人与地面接触点的坐标,即行人目标的世界坐标(x