
一种基于单目摄像头的移动目标距离与高度的测量方法.pdf

是你****馨呀

1/9
2/9

3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于单目摄像头的移动目标距离与高度的测量方法.pdf
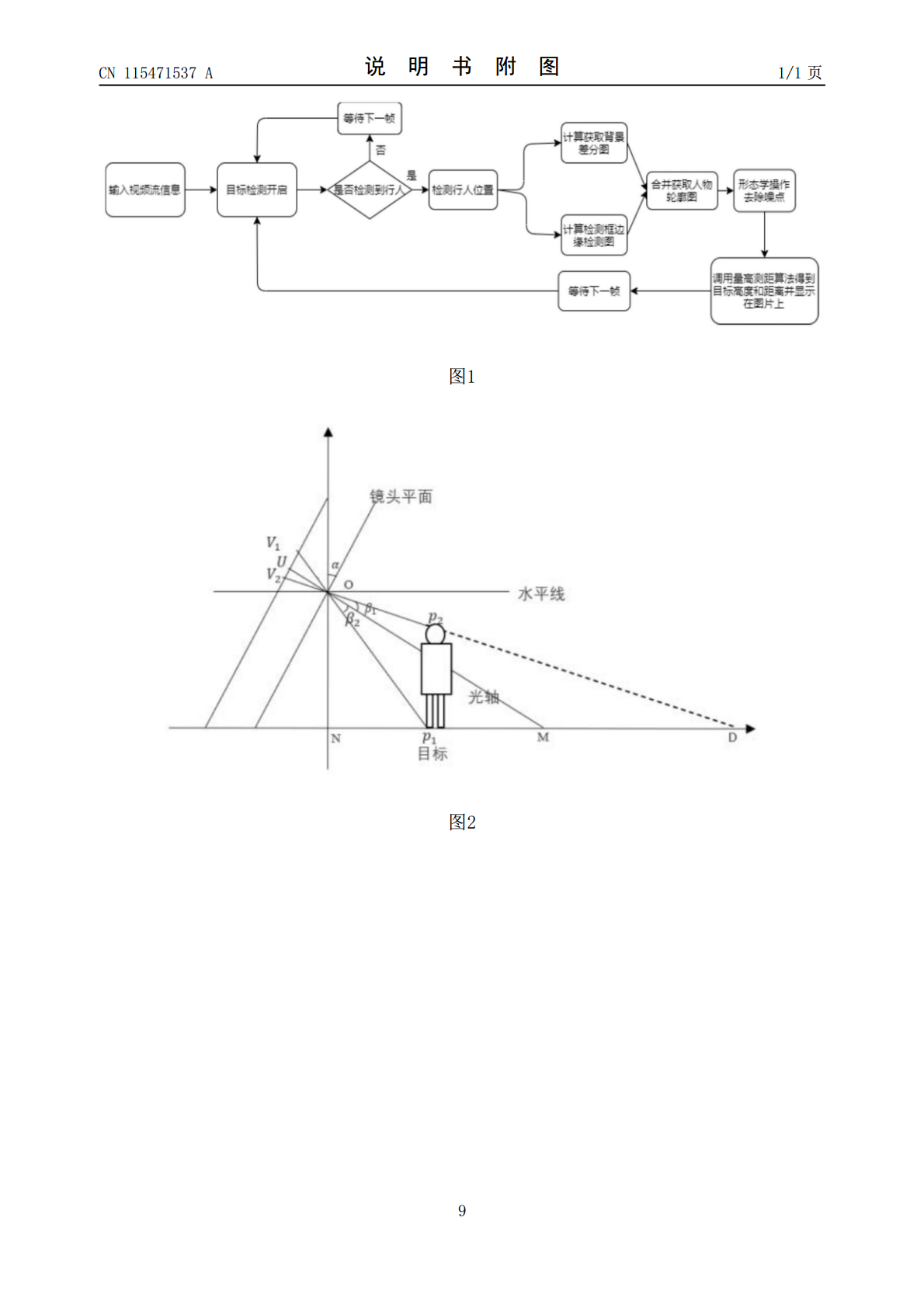
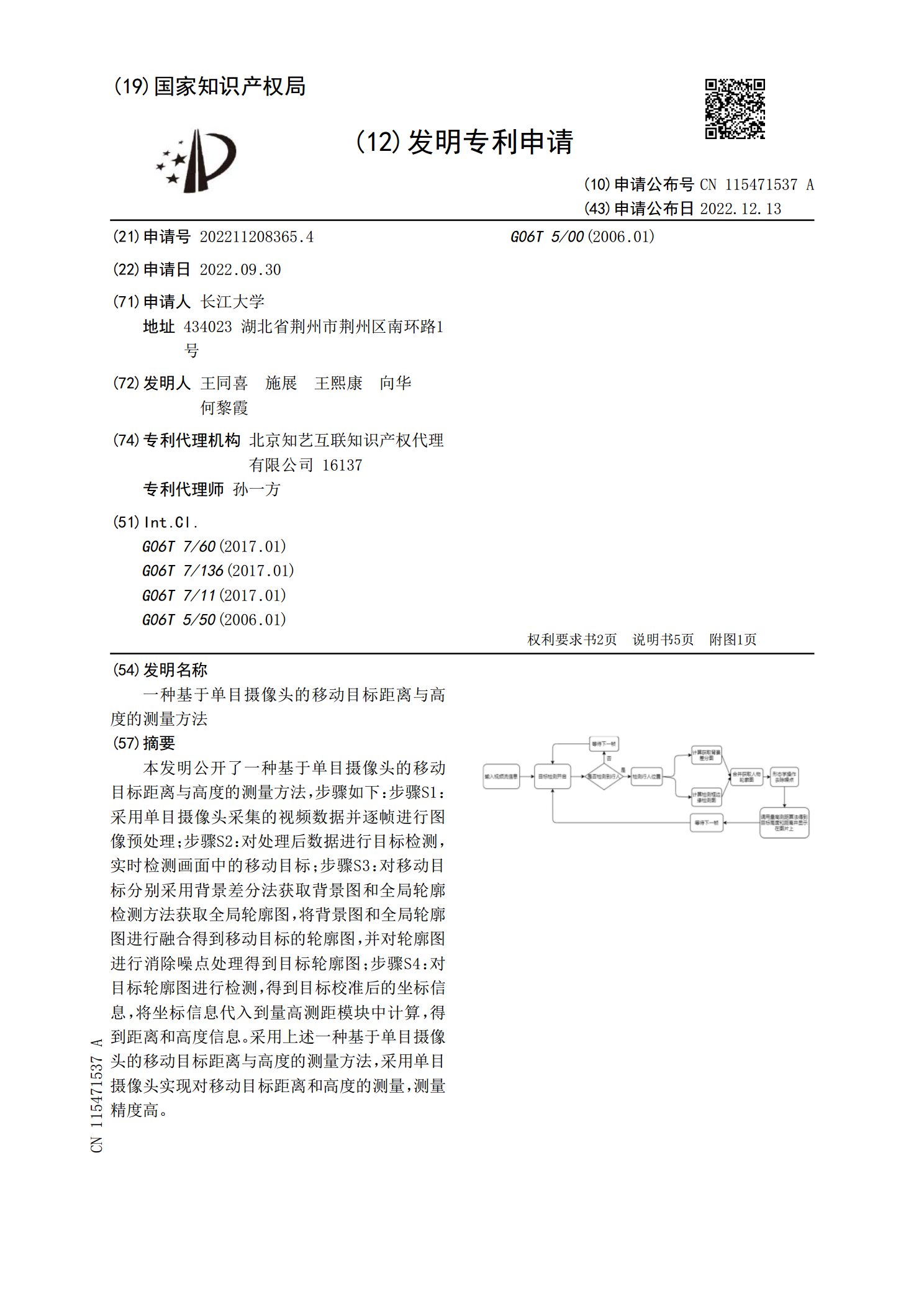
本发明公开了一种基于单目摄像头的移动目标距离与高度的测量方法,步骤如下:步骤S1:采用单目摄像头采集的视频数据并逐帧进行图像预处理;步骤S2:对处理后数据进行目标检测,实时检测画面中的移动目标;步骤S3:对移动目标分别采用背景差分法获取背景图和全局轮廓检测方法获取全局轮廓图,将背景图和全局轮廓图进行融合得到移动目标的轮廓图,并对轮廓图进行消除噪点处理得到目标轮廓图;步骤S4:对目标轮廓图进行检测,得到目标校准后的坐标信息,将坐标信息代入到量高测距模块中计算,得到距离和高度信息。采用上述一种基于单目摄像头的
一种基于车载单目摄像机的行人距离测量方法.pdf
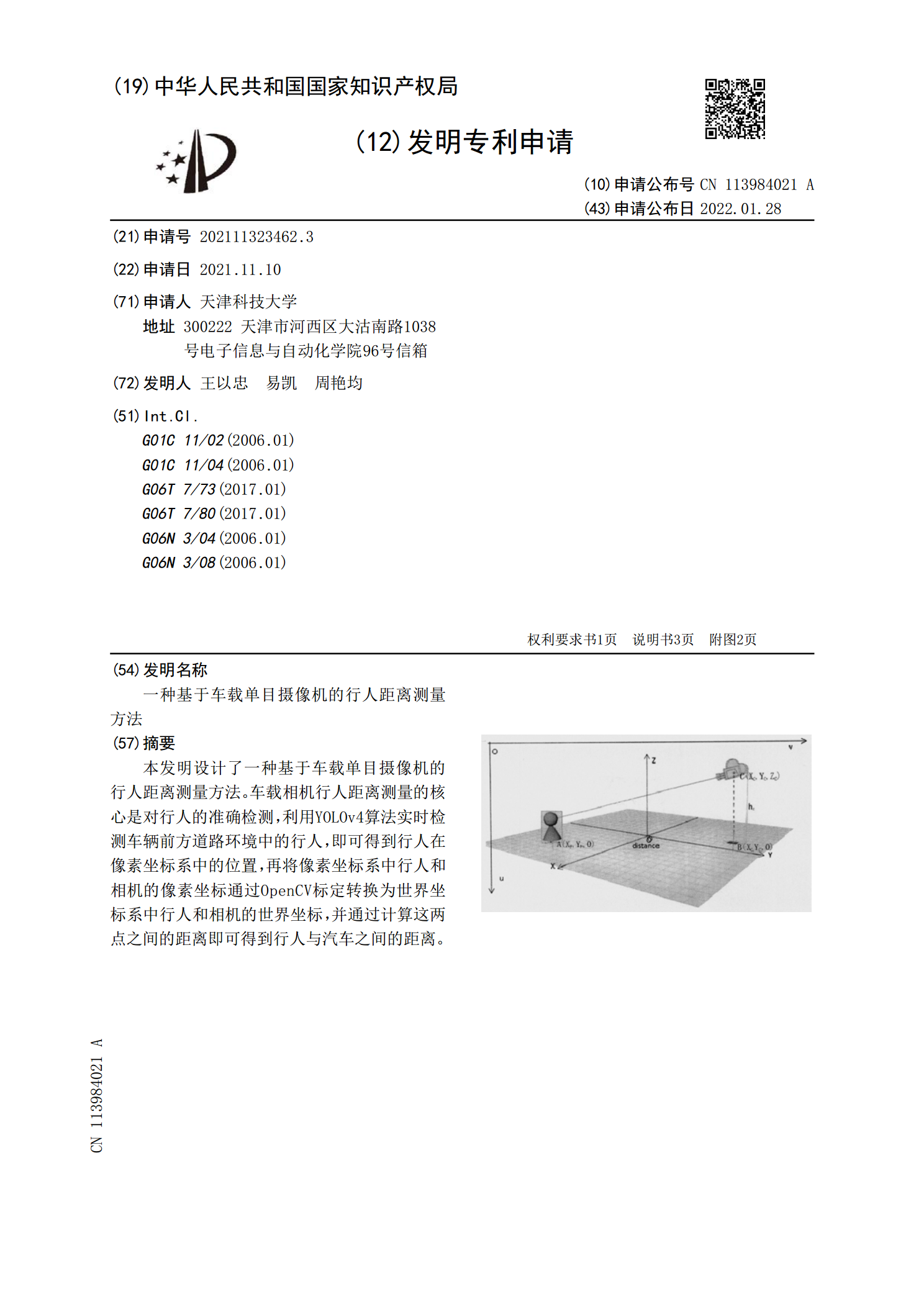
本发明设计了一种基于车载单目摄像机的行人距离测量方法。车载相机行人距离测量的核心是对行人的准确检测,利用YOLOv4算法实时检测车辆前方道路环境中的行人,即可得到行人在像素坐标系中的位置,再将像素坐标系中行人和相机的像素坐标通过OpenCV标定转换为世界坐标系中行人和相机的世界坐标,并通过计算这两点之间的距离即可得到行人与汽车之间的距离。
基于单目摄像头与距离传感器的透明A柱系统及实现方法.pdf
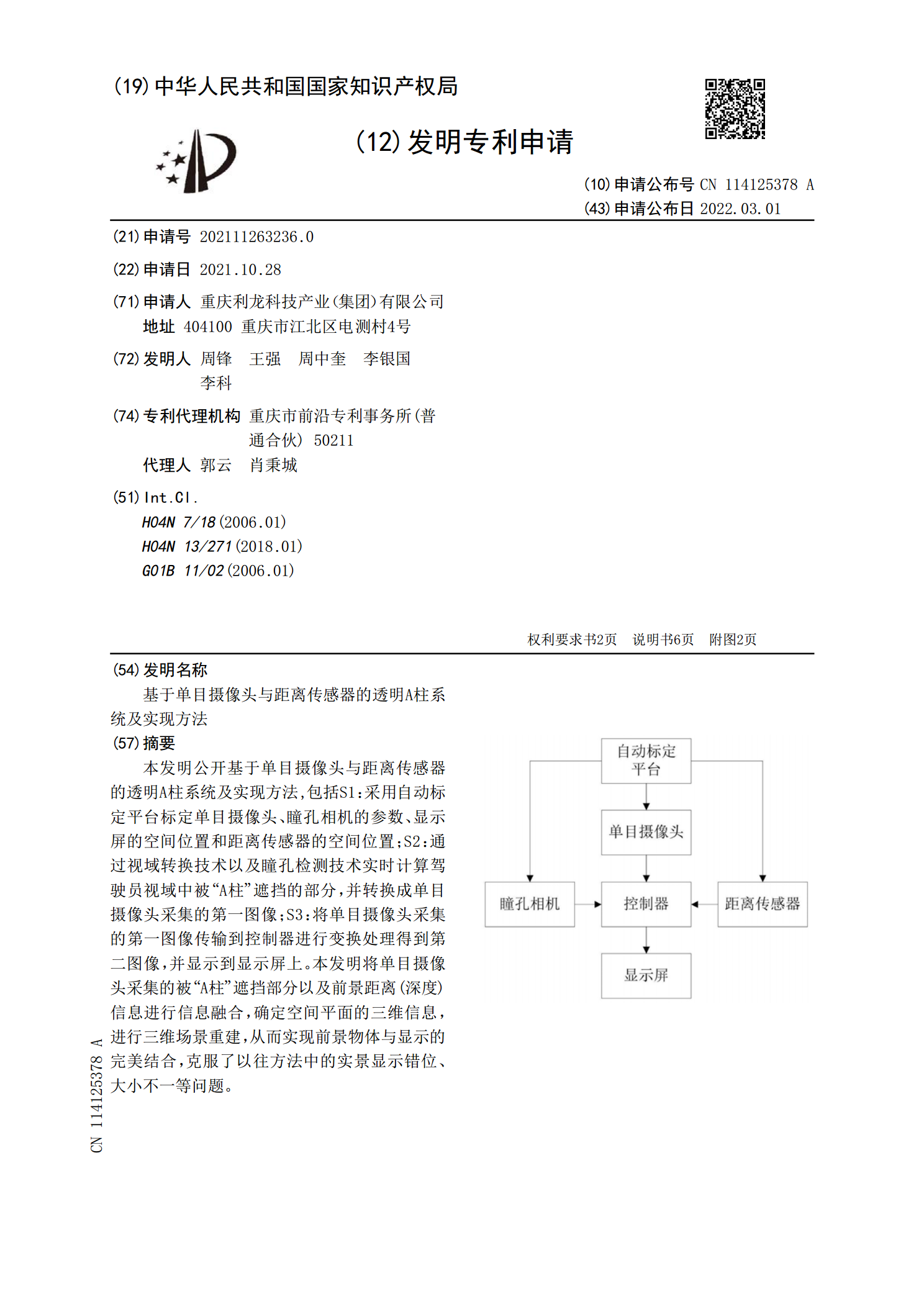
本发明公开基于单目摄像头与距离传感器的透明A柱系统及实现方法,包括S1:采用自动标定平台标定单目摄像头、瞳孔相机的参数、显示屏的空间位置和距离传感器的空间位置;S2:通过视域转换技术以及瞳孔检测技术实时计算驾驶员视域中被“A柱”遮挡的部分,并转换成单目摄像头采集的第一图像;S3:将单目摄像头采集的第一图像传输到控制器进行变换处理得到第二图像,并显示到显示屏上。本发明将单目摄像头采集的被“A柱”遮挡部分以及前景距离(深度)信息进行信息融合,确定空间平面的三维信息,进行三维场景重建,从而实现前景物体与显示的完

一种基于动态长基线的多目相机船舶高度测量方法.pdf
本发明公开了一种基于动态长基线的多目相机船舶高度测量方法,包括:S1:将河道划分为三个等宽度区域;S2:将三台并排的相机中不同基线值下的两台相机组成双目拍摄系统,在三个等宽度区域内进行拍摄,获得三组不同的左视图图像和右视图图像;S3:获取每个河道下双目拍摄系统的预标定参数阈值范围;S4:将测量的距离与预标定参数阈值范围进行比较,从而动态调整拍摄系统的组合情况;S5:在多目相机系统中动态调整不同基线距离下与该距离值相符合的两台相机组合成的拍摄系统,对航行船舶进行拍摄获得图像数据;S6:将双目拍摄系统得到的图
一种基于红外激光的距离测量方法及其移动终端.pdf
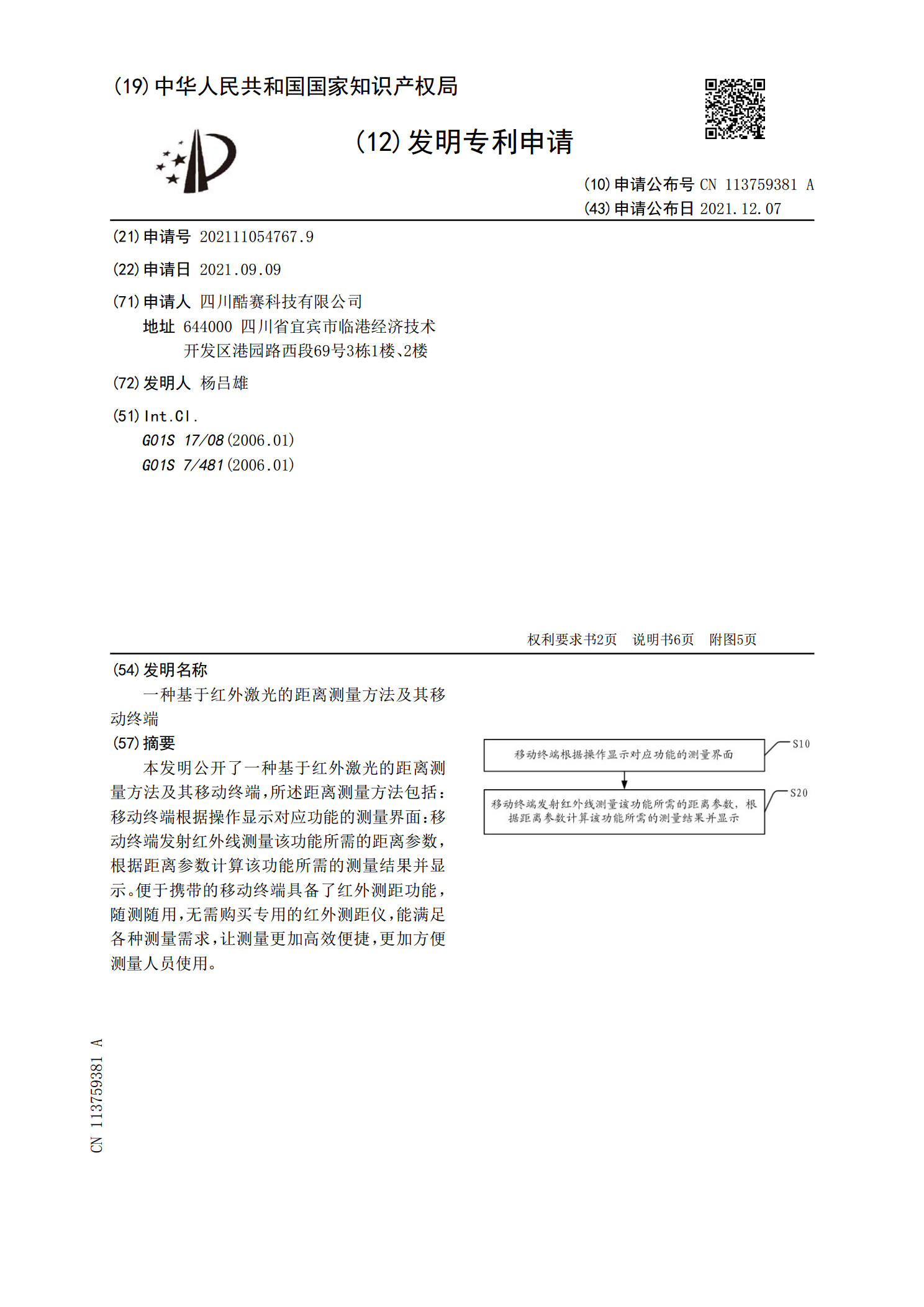
本发明公开了一种基于红外激光的距离测量方法及其移动终端,所述距离测量方法包括:移动终端根据操作显示对应功能的测量界面:移动终端发射红外线测量该功能所需的距离参数,根据距离参数计算该功能所需的测量结果并显示。便于携带的移动终端具备了红外测距功能,随测随用,无需购买专用的红外测距仪,能满足各种测量需求,让测量更加高效便捷,更加方便测量人员使用。