
操舵控制装置、操舵控制方法以及操舵控制系统.pdf

一吃****书竹

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共46页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
操舵控制装置、操舵控制方法以及操舵控制系统.pdf
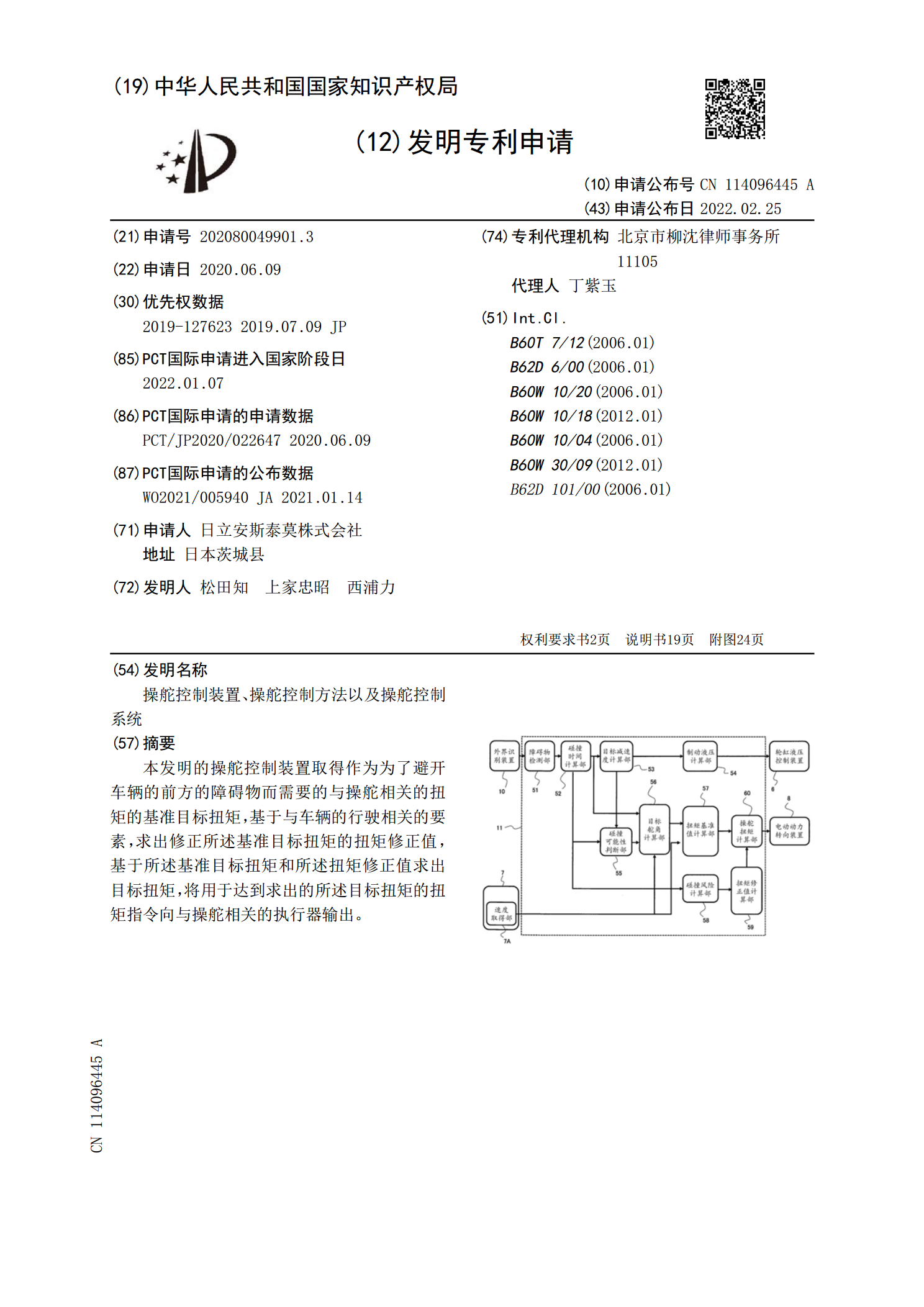
本发明的操舵控制装置取得作为为了避开车辆的前方的障碍物而需要的与操舵相关的扭矩的基准目标扭矩,基于与车辆的行驶相关的要素,求出修正所述基准目标扭矩的扭矩修正值,基于所述基准目标扭矩和所述扭矩修正值求出目标扭矩,将用于达到求出的所述目标扭矩的扭矩指令向与操舵相关的执行器输出。
操舵装置.pdf
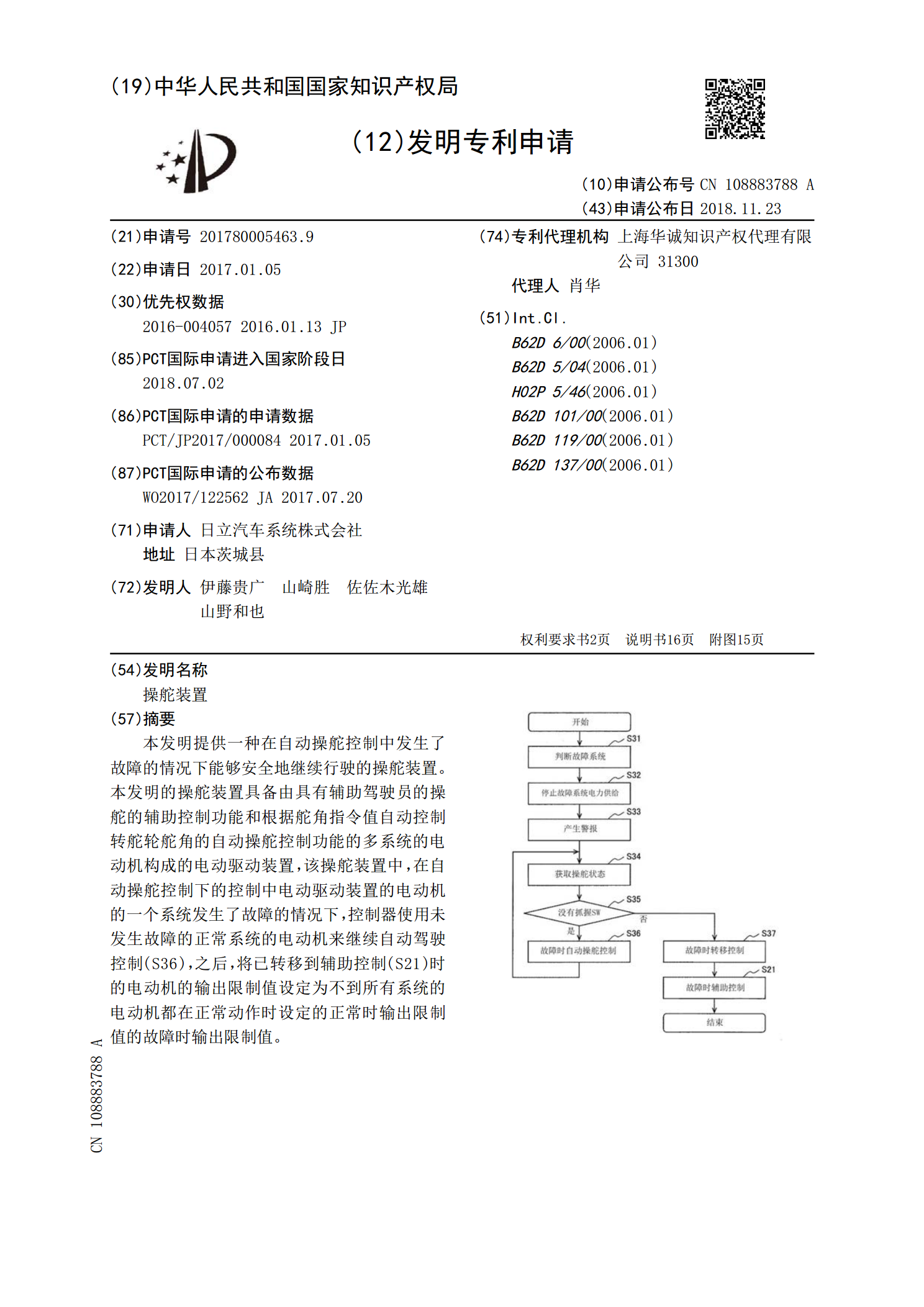
本发明提供一种在自动操舵控制中发生了故障的情况下能够安全地继续行驶的操舵装置。本发明的操舵装置具备由具有辅助驾驶员的操舵的辅助控制功能和根据舵角指令值自动控制转舵轮舵角的自动操舵控制功能的多系统的电动机构成的电动驱动装置,该操舵装置中,在自动操舵控制下的控制中电动驱动装置的电动机的一个系统发生了故障的情况下,控制器使用未发生故障的正常系统的电动机来继续自动驾驶控制(S36),之后,将已转移到辅助控制(S21)时的电动机的输出限制值设定为不到所有系统的电动机都在正常动作时设定的正常时输出限制值的故障时输出限
操舵装置.pdf
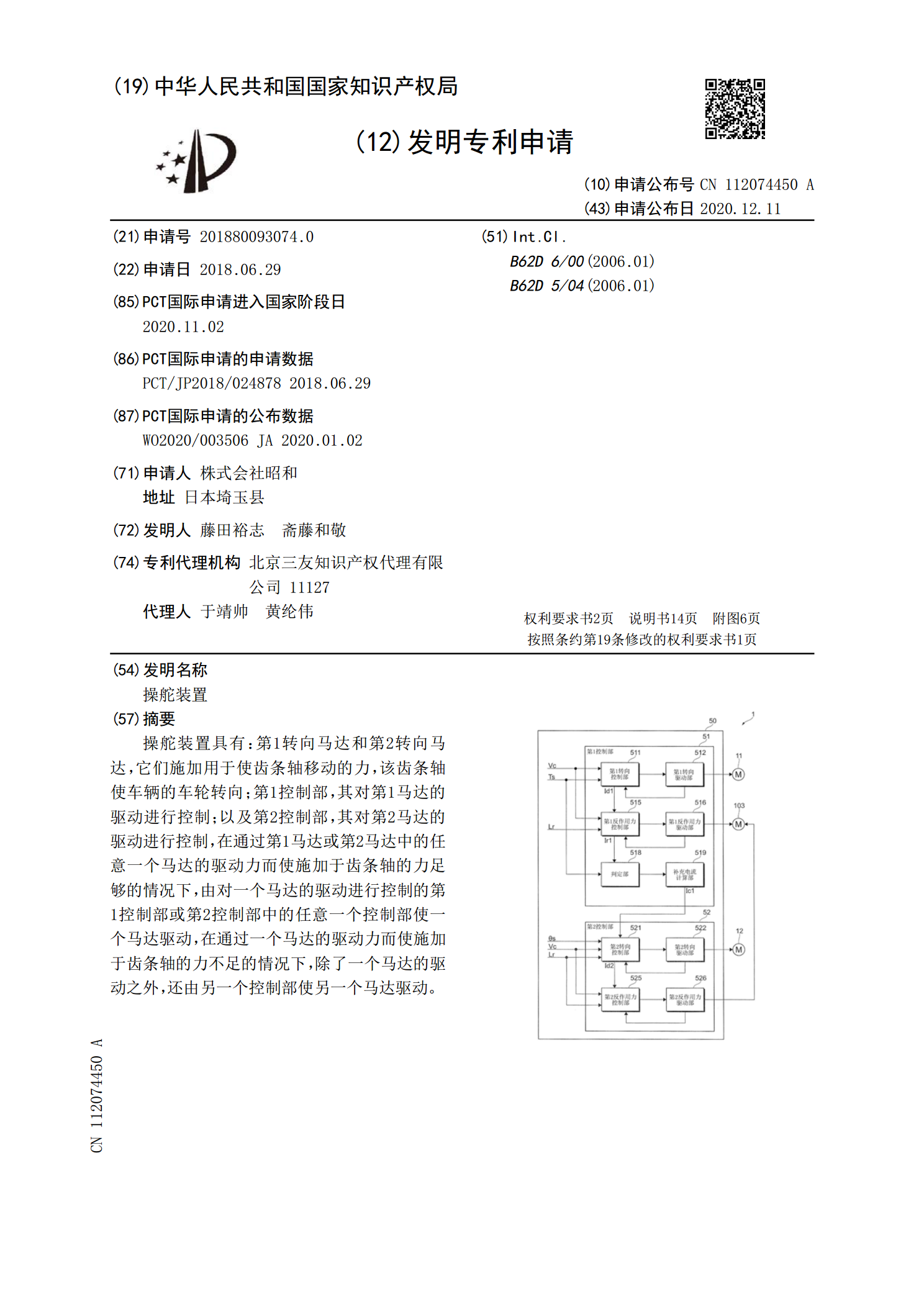
操舵装置具有:第1转向马达和第2转向马达,它们施加用于使齿条轴移动的力,该齿条轴使车辆的车轮转向;第1控制部,其对第1马达的驱动进行控制;以及第2控制部,其对第2马达的驱动进行控制,在通过第1马达或第2马达中的任意一个马达的驱动力而使施加于齿条轴的力足够的情况下,由对一个马达的驱动进行控制的第1控制部或第2控制部中的任意一个控制部使一个马达驱动,在通过一个马达的驱动力而使施加于齿条轴的力不足的情况下,除了一个马达的驱动之外,还由另一个控制部使另一个马达驱动。

车辆的操舵反力控制装置.pdf
本发明提供具备以使转向轮(20FL、20FR)的转向角成为目标转向角的方式经由控制装置(14)控制电动助力转向装置的驾驶辅助装置(16)的车辆(18)的操舵反力控制装置(10)。在驾驶辅助装置(16)正在工作时(S20),控制装置(14)基于作为操舵角(θ)的时间微分值或利用驾驶辅助控制的目标操舵角(θt)修正后的操舵角(θ)的时间微分值的操舵角速度(dθ)来运算目标操舵衰减转矩(Td)(S50、70)。在操舵角速度(dθ)的大小小于基准值(θdc)的情况下,目标操舵衰减转矩(Td)以在驾驶辅助装置的工作
车辆的操舵反力控制装置.pdf
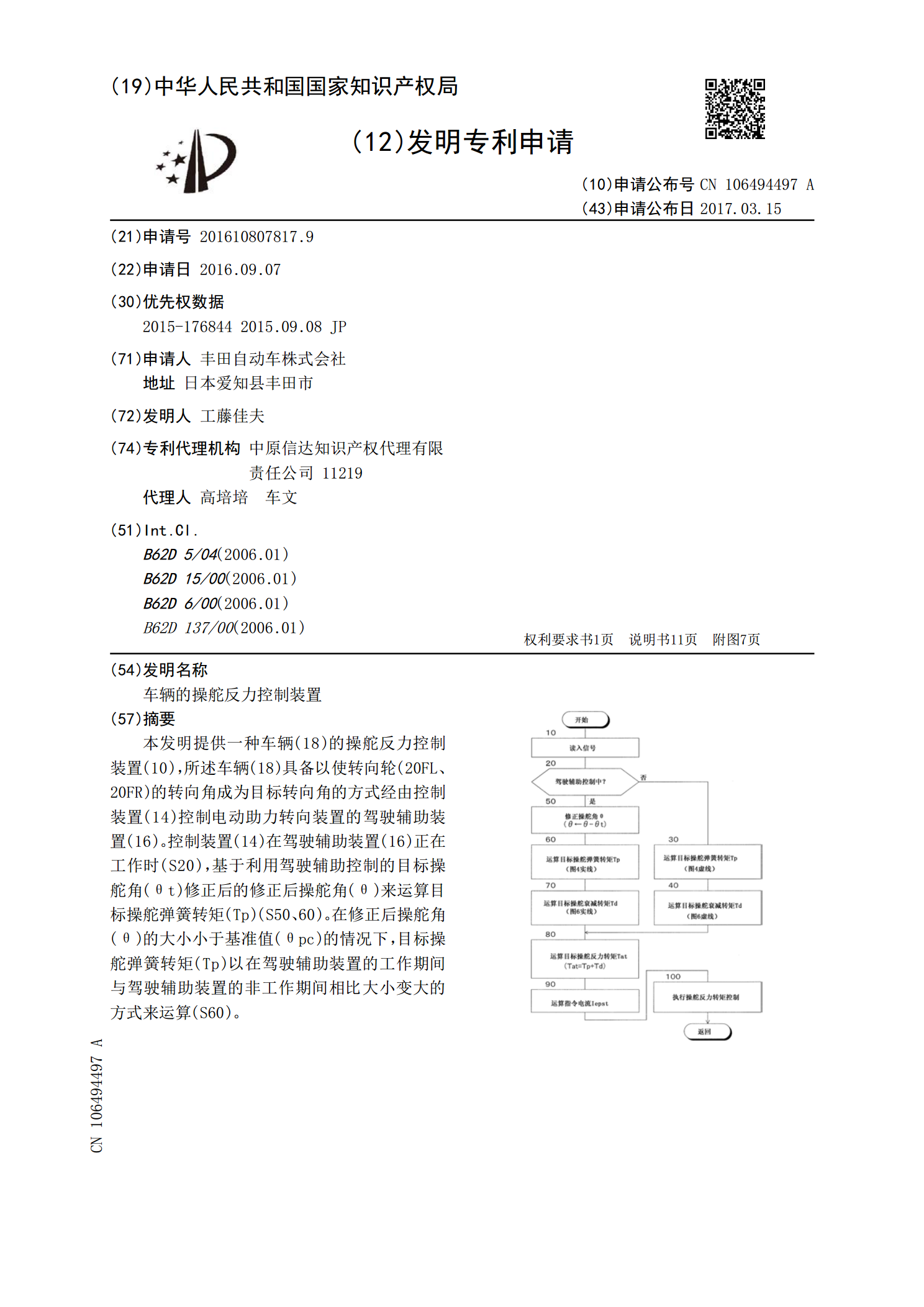
本发明提供一种车辆(18)的操舵反力控制装置(10),所述车辆(18)具备以使转向轮(20FL、20FR)的转向角成为目标转向角的方式经由控制装置(14)控制电动助力转向装置的驾驶辅助装置(16)。控制装置(14)在驾驶辅助装置(16)正在工作时(S20),基于利用驾驶辅助控制的目标操舵角(θt)修正后的修正后操舵角(θ)来运算目标操舵弹簧转矩(Tp)(S50、60)。在修正后操舵角(θ)的大小小于基准值(θpc)的情况下,目标操舵弹簧转矩(Tp)以在驾驶辅助装置的工作期间与驾驶辅助装置的非工作期间相比大