
车辆的操舵反力控制装置.pdf

努力****骞北

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车辆的操舵反力控制装置.pdf
本发明提供具备以使转向轮(20FL、20FR)的转向角成为目标转向角的方式经由控制装置(14)控制电动助力转向装置的驾驶辅助装置(16)的车辆(18)的操舵反力控制装置(10)。在驾驶辅助装置(16)正在工作时(S20),控制装置(14)基于作为操舵角(θ)的时间微分值或利用驾驶辅助控制的目标操舵角(θt)修正后的操舵角(θ)的时间微分值的操舵角速度(dθ)来运算目标操舵衰减转矩(Td)(S50、70)。在操舵角速度(dθ)的大小小于基准值(θdc)的情况下,目标操舵衰减转矩(Td)以在驾驶辅助装置的工作
车辆的操舵反力控制装置.pdf
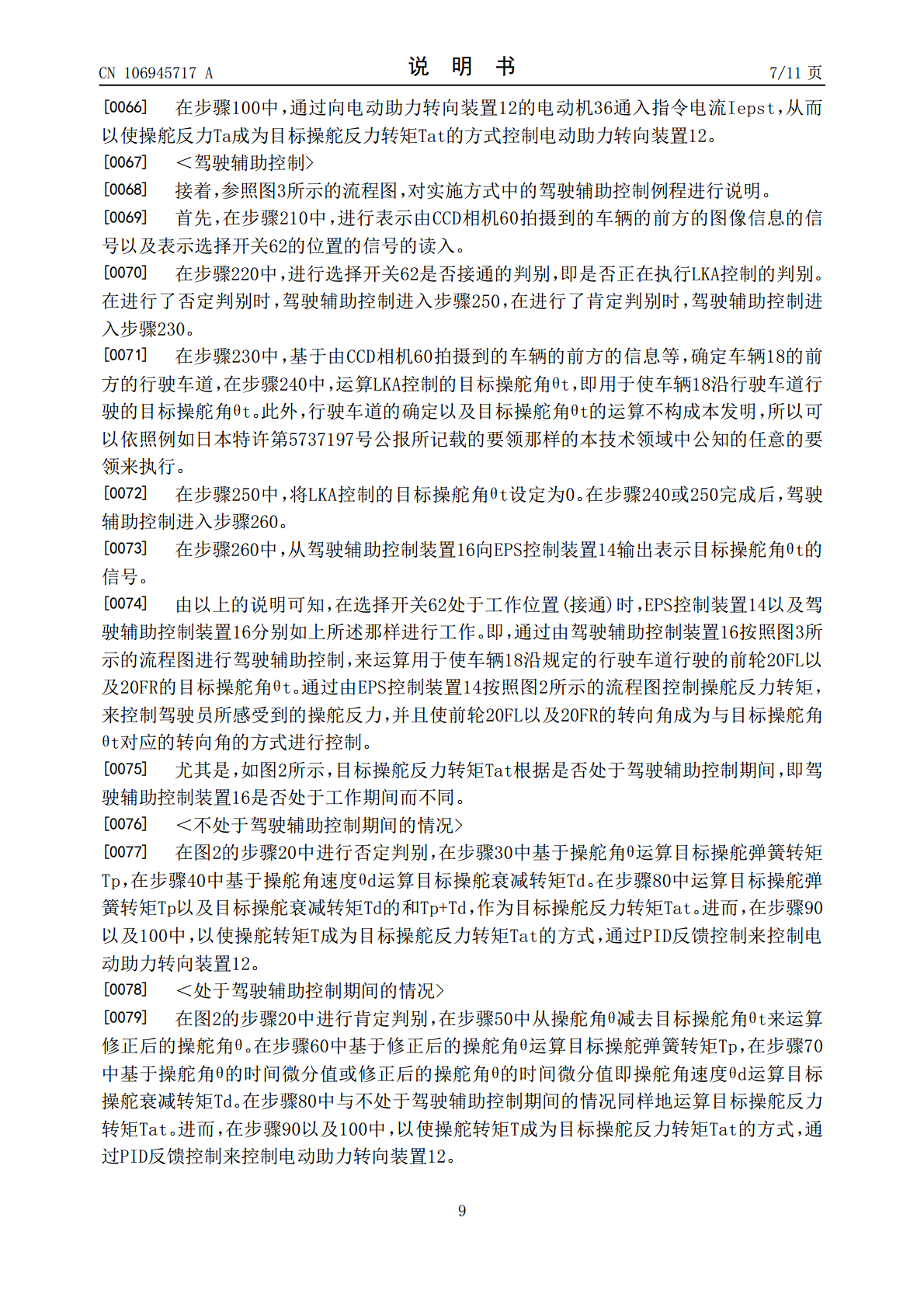
本发明提供一种车辆(18)的操舵反力控制装置(10),所述车辆(18)具备以使转向轮(20FL、20FR)的转向角成为目标转向角的方式经由控制装置(14)控制电动助力转向装置的驾驶辅助装置(16)。控制装置(14)在驾驶辅助装置(16)正在工作时(S20),基于利用驾驶辅助控制的目标操舵角(θt)修正后的修正后操舵角(θ)来运算目标操舵弹簧转矩(Tp)(S50、60)。在修正后操舵角(θ)的大小小于基准值(θpc)的情况下,目标操舵弹簧转矩(Tp)以在驾驶辅助装置的工作期间与驾驶辅助装置的非工作期间相比大
车辆用操舵装置.pdf
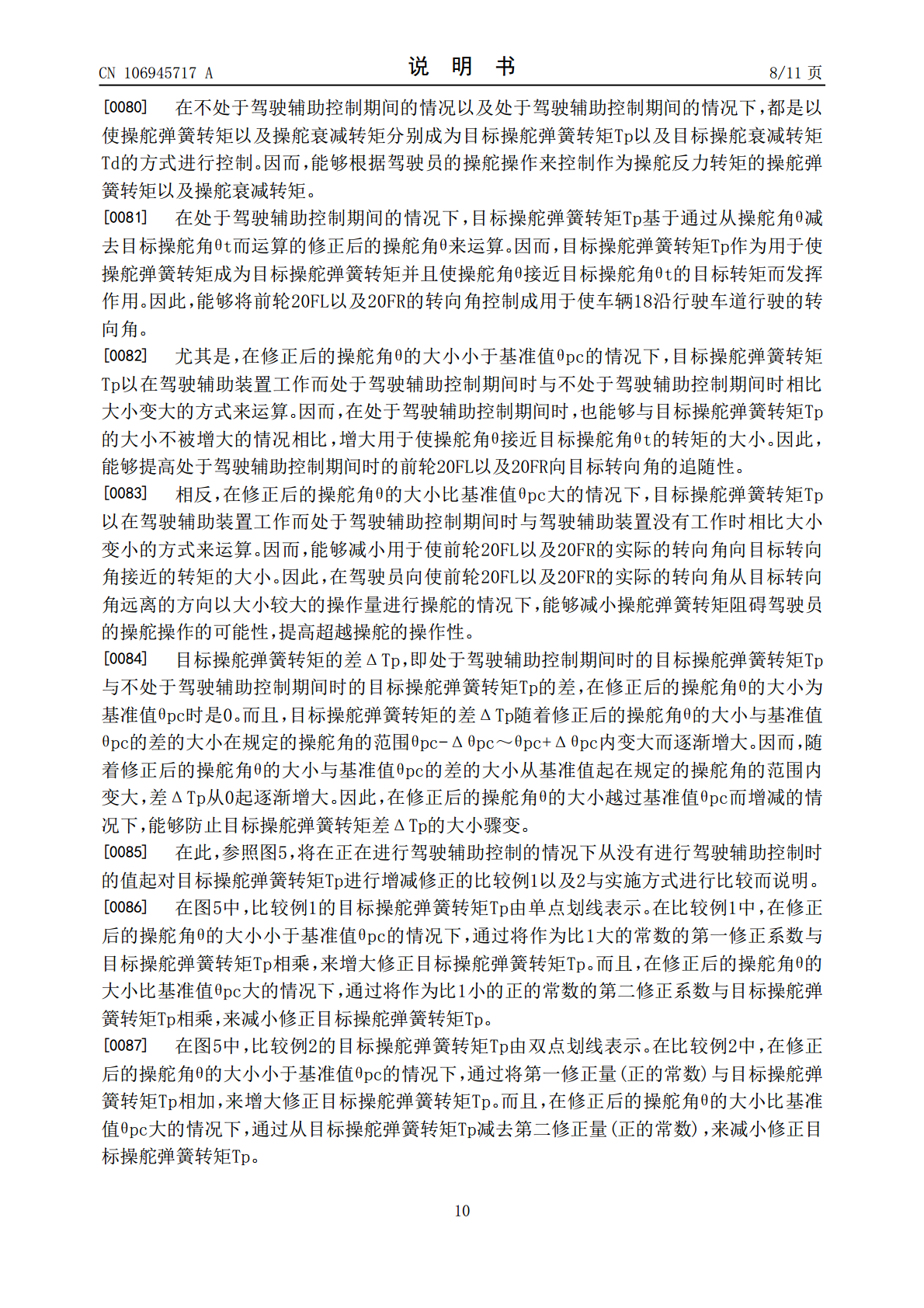
在车体(2)上安装通过操舵机构(12)而能够转向操作的前轮(6L、6R)。操舵机构(12)的转向缸(22L、22R)根据设置在驾驶室(5)内的操舵驾驶盘(27)的操作而伸长或缩小,对前轮(6L、6R)进行转向操作。在操舵机构(12)设置检测左侧的前轮(6L)的操舵角(θ)的旋转角度传感器(28)、和检测前轮(6L)是否为直进状态的接近开关(29)。控制器(30)在由旋转角度传感器(28)检测出的操舵角(θ)和接近开关(29)的检测结果不同时,判定为旋转角度传感器(28)或者接近开关(29)为异常。

车辆及操舵装置.pdf
车辆(10)具有:前轮驱动装置(34)、以及分别独立地驱动后轮(36a、36b)的后轮驱动装置(38)。驱动状态控制装置(28)进行对前轮单独驱动状态与后轮单独驱动状态进行切换的第1切换、对复合驱动状态与后轮单独驱动状态进行切换的第2切换、以及对复合驱动状态与前轮单独驱动状态进行切换的第3切换当中的至少一者的切换。在驱动状态控制装置(28)进行所述第1切换至所述第3切换当中的任一者时,操舵装置(50)的辅助力控制单元(68)使操舵辅助力的控制发生变化。

车辆的操舵装置.pdf
一种以有效地配置车辆的操舵机构为目的的车辆的操舵装置。具备将向输入轴(33)的操作输入变换为任意的转动量以及或者任意的转动力而从输出轴(34)输出的操舵单元(32)、与输入轴(33)连结的转向手柄(15)、在与输出轴(34)连结的同时支撑车辆的前轮(WF)的支撑托架(4a)、收纳操舵单元(32)的收纳壳体(31),将收纳壳体(31)一体地安装在两轮摩托车(1)的车体框架(2)的前端部上。操舵单元(32)由将输入操舵角变换为任意的输出操舵角而向前轮(WF)传递的可变比率操舵机构(32b)和对输入