
清扫路径的确定方法、装置及电子设备.pdf

睿达****的的


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
清扫路径的确定方法、装置及电子设备.pdf
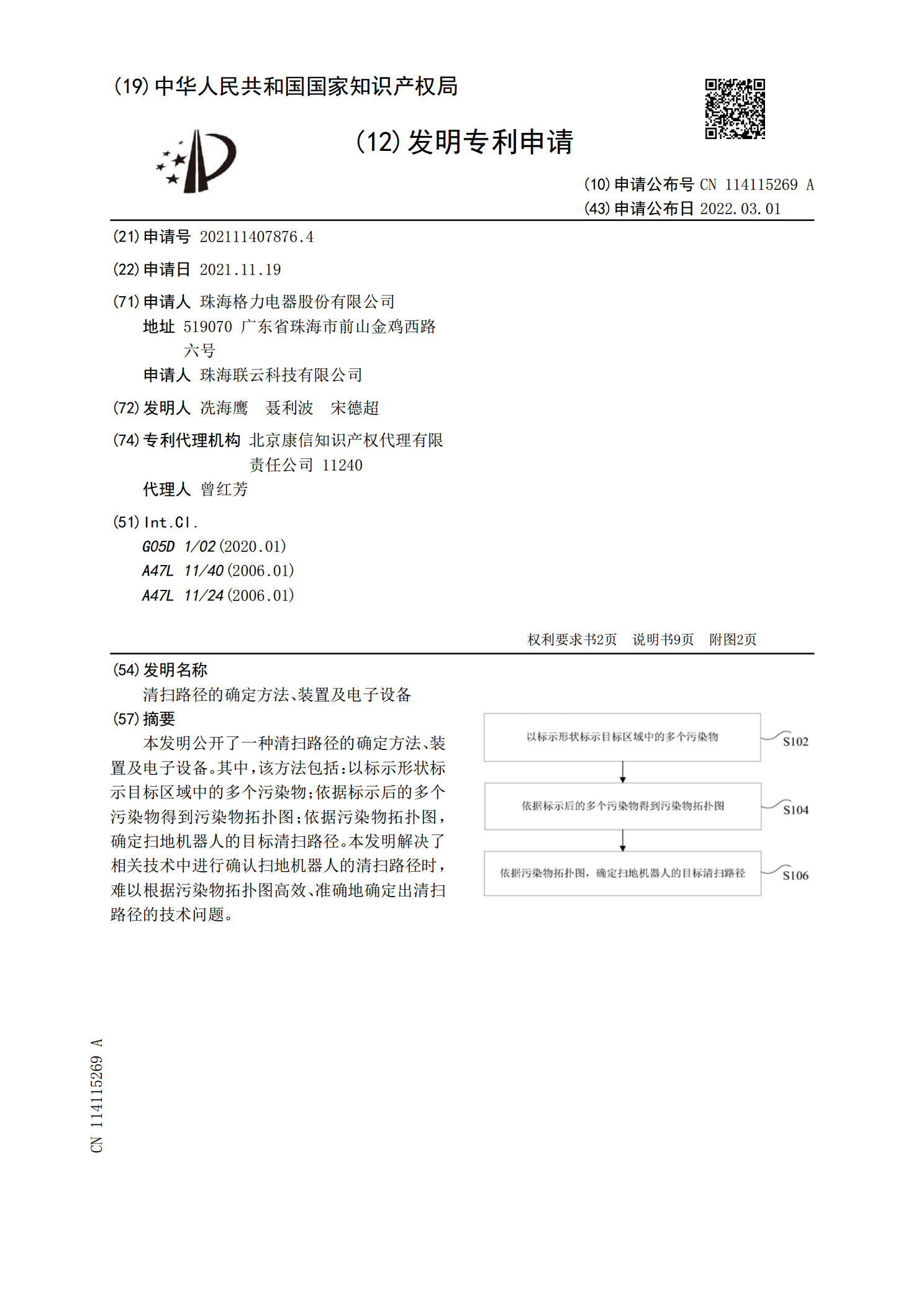
本发明公开了一种清扫路径的确定方法、装置及电子设备。其中,该方法包括:以标示形状标示目标区域中的多个污染物;依据标示后的多个污染物得到污染物拓扑图;依据污染物拓扑图,确定扫地机器人的目标清扫路径。本发明解决了相关技术中进行确认扫地机器人的清扫路径时,难以根据污染物拓扑图高效、准确地确定出清扫路径的技术问题。
路径确定方法、装置、电子设备及存储介质.pdf
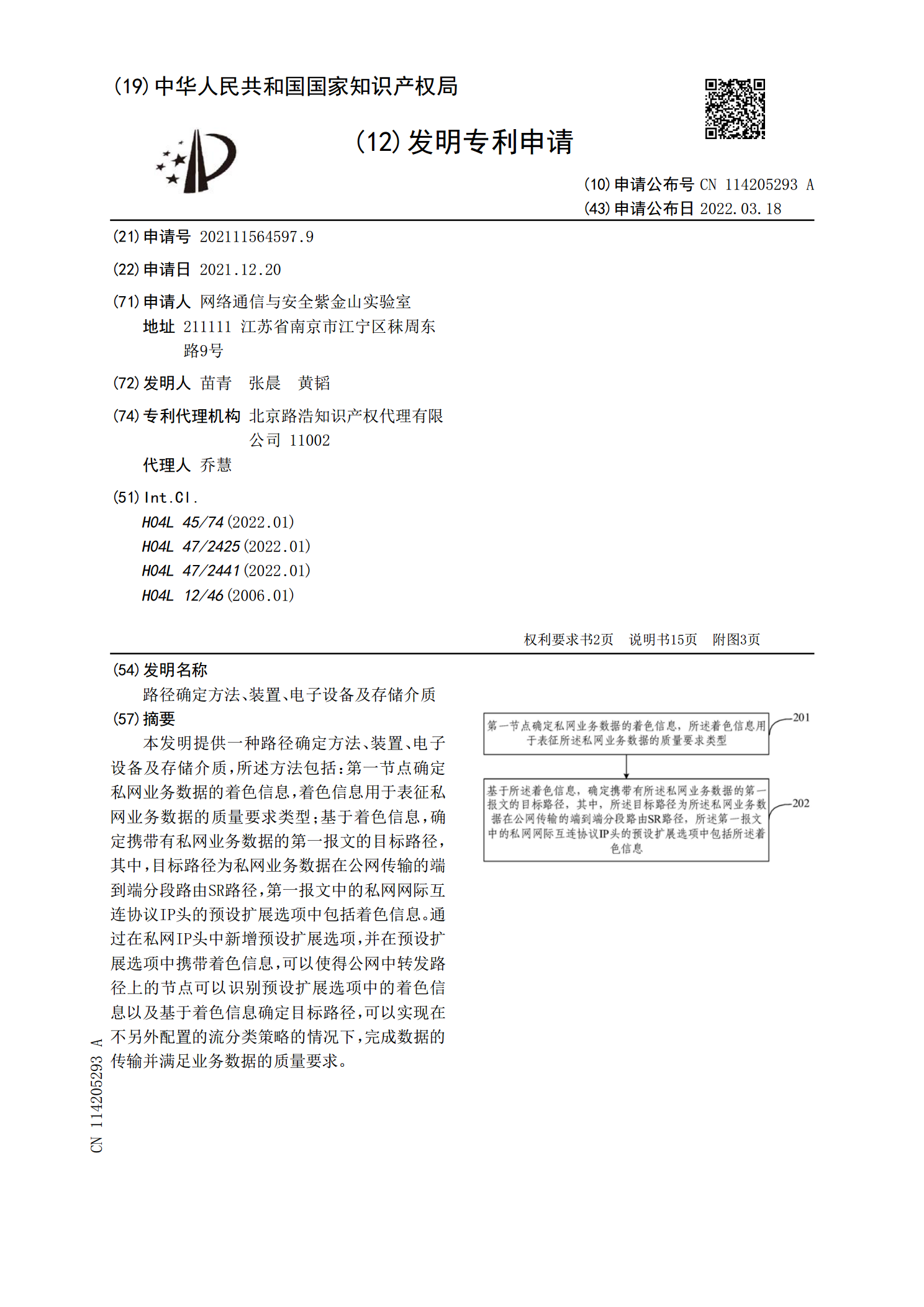
本发明提供一种路径确定方法、装置、电子设备及存储介质,所述方法包括:第一节点确定私网业务数据的着色信息,着色信息用于表征私网业务数据的质量要求类型;基于着色信息,确定携带有私网业务数据的第一报文的目标路径,其中,目标路径为私网业务数据在公网传输的端到端分段路由SR路径,第一报文中的私网网际互连协议IP头的预设扩展选项中包括着色信息。通过在私网IP头中新增预设扩展选项,并在预设扩展选项中携带着色信息,可以使得公网中转发路径上的节点可以识别预设扩展选项中的着色信息以及基于着色信息确定目标路径,可以实现在不另外

路径确定方法、装置、存储介质及电子设备.pdf
本申请实施例公开了一种路径确定方法、装置、存储介质及电子设备。该方法包括:检测第一自导引运输设备位于第一工作点,确定所述第一自导引运输设备从所述第一工作点移动至其他位置必经的主路径路段为停留阻塞路段;检测第二自导引运输设备的运动路径中的主路径路段是否包括所述停留阻塞路段;若是,则禁止所述第二自导引运输设备在所述停留阻塞路段停留。通过执行本技术方案,可以通过变更对自导引运输设备的控制方式,使得自导引运输设备可以避免出现路径死锁的现象,从而实现提高自导引运输设备的工作效率的效果。
卡车路径点确定方法、装置及电子设备.pdf
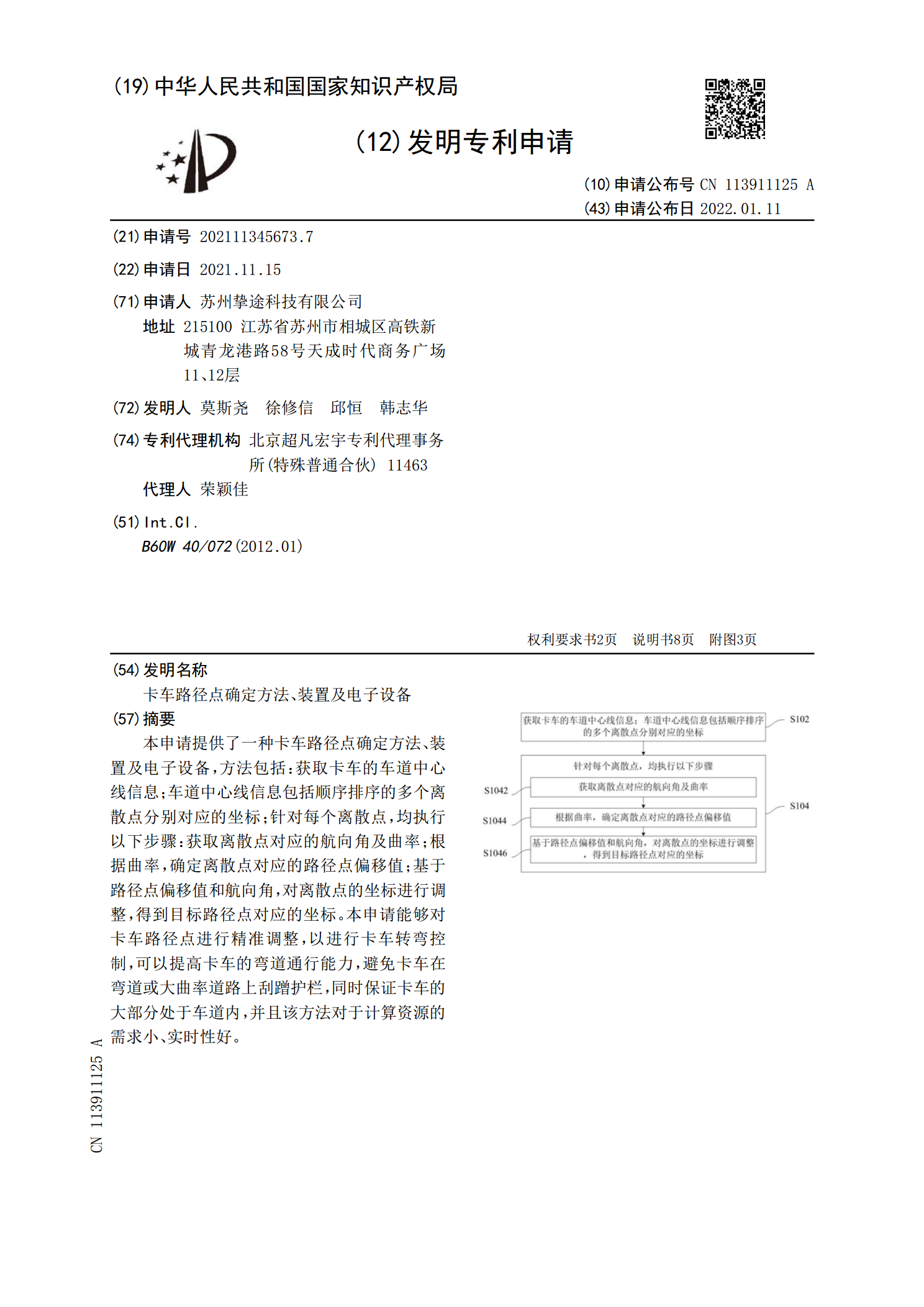
本申请提供了一种卡车路径点确定方法、装置及电子设备,方法包括:获取卡车的车道中心线信息;车道中心线信息包括顺序排序的多个离散点分别对应的坐标;针对每个离散点,均执行以下步骤:获取离散点对应的航向角及曲率;根据曲率,确定离散点对应的路径点偏移值;基于路径点偏移值和航向角,对离散点的坐标进行调整,得到目标路径点对应的坐标。本申请能够对卡车路径点进行精准调整,以进行卡车转弯控制,可以提高卡车的弯道通行能力,避免卡车在弯道或大曲率道路上刮蹭护栏,同时保证卡车的大部分处于车道内,并且该方法对于计算资源的需求小、实时

一种路径确定方法、装置及电子设备.pdf
本发明实施例提供了一种路径确定方法、装置及电子设备。其中,所述方法包括:针对待确定路径的起始空间点和目的空间点,确定当前第一中间点和当前第二中间点是否属于已确定的同一最短路径;如果否,从所述当前第一中间点的相邻空间点中确定新的当前第一中间点,和/或,从所述当前第二中间点的相邻空间点中确定新的当前第二中间点,并返回执行所述确定当前第一中间点和当前第二中间点是否属于已确定的同一最短路径的步骤;如果是,确定第一子路径,第二子路径,以及第三子路径;将所述第一子路径、所述第二子路径和所述第三子路径组成的路径确定为所