
一种基于深度学习的机动目标ISAR自聚焦成像方法.pdf

灵波****ng

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于深度学习的机动目标ISAR自聚焦成像方法.pdf
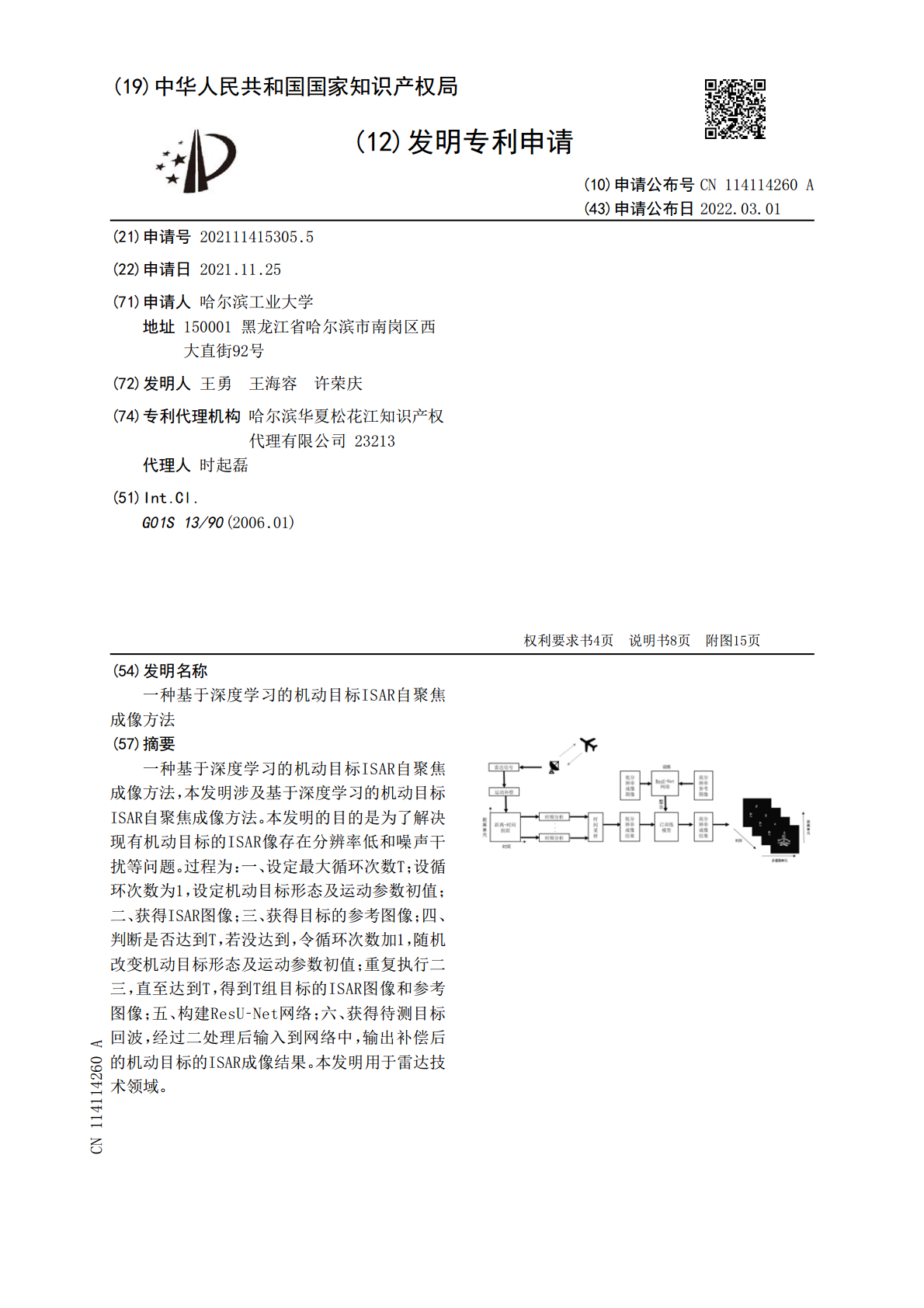
一种基于深度学习的机动目标ISAR自聚焦成像方法,本发明涉及基于深度学习的机动目标ISAR自聚焦成像方法。本发明的目的是为了解决现有机动目标的ISAR像存在分辨率低和噪声干扰等问题。过程为:一、设定最大循环次数T;设循环次数为1,设定机动目标形态及运动参数初值;二、获得ISAR图像;三、获得目标的参考图像;四、判断是否达到T,若没达到,令循环次数加1,随机改变机动目标形态及运动参数初值;重复执行二三,直至达到T,得到T组目标的ISAR图像和参考图像;五、构建ResU‑Net网络;六、获得待测目标回波,经过
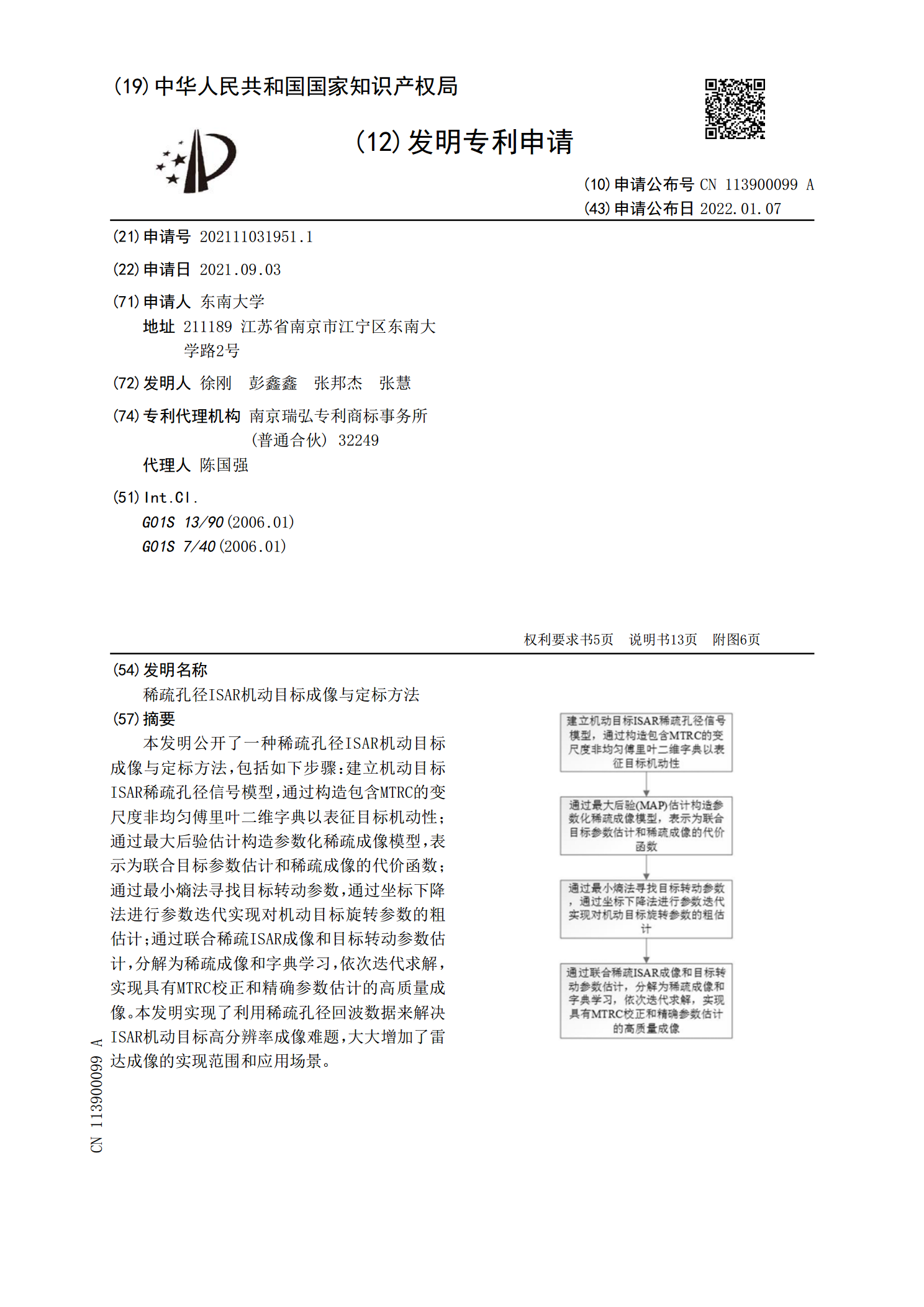
稀疏孔径ISAR机动目标成像与定标方法.pdf
本发明公开了一种稀疏孔径ISAR机动目标成像与定标方法,包括如下步骤:建立机动目标ISAR稀疏孔径信号模型,通过构造包含MTRC的变尺度非均匀傅里叶二维字典以表征目标机动性;通过最大后验估计构造参数化稀疏成像模型,表示为联合目标参数估计和稀疏成像的代价函数;通过最小熵法寻找目标转动参数,通过坐标下降法进行参数迭代实现对机动目标旋转参数的粗估计;通过联合稀疏ISAR成像和目标转动参数估计,分解为稀疏成像和字典学习,依次迭代求解,实现具有MTRC校正和精确参数估计的高质量成像。本发明实现了利用稀疏孔径回波数据
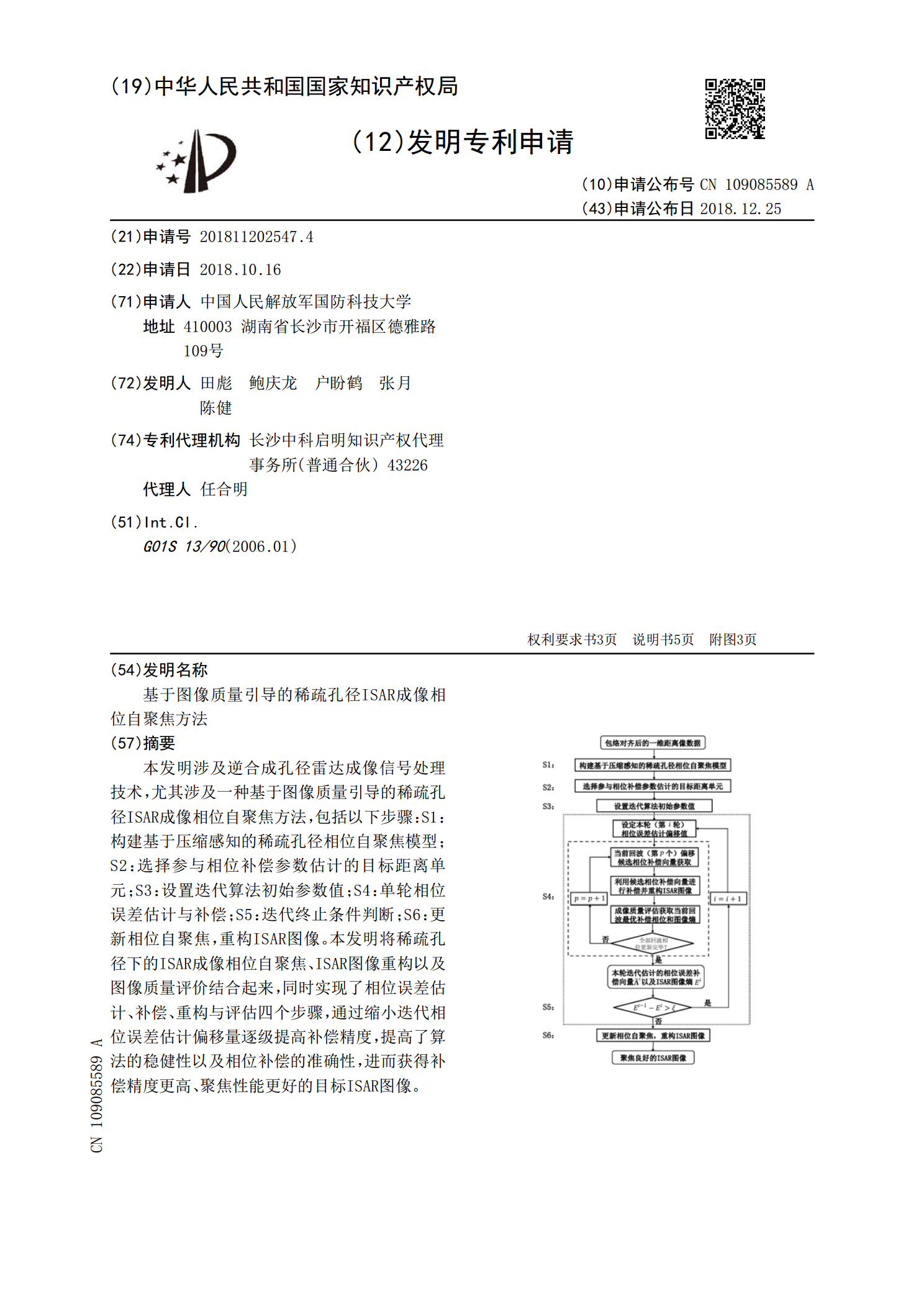
基于图像质量引导的稀疏孔径ISAR成像相位自聚焦方法.pdf
本发明涉及逆合成孔径雷达成像信号处理技术,尤其涉及一种基于图像质量引导的稀疏孔径ISAR成像相位自聚焦方法,包括以下步骤:S1:构建基于压缩感知的稀疏孔径相位自聚焦模型;S2:选择参与相位补偿参数估计的目标距离单元;S3:设置迭代算法初始参数值;S4:单轮相位误差估计与补偿;S5:迭代终止条件判断;S6:更新相位自聚焦,重构ISAR图像。本发明将稀疏孔径下的ISAR成像相位自聚焦、ISAR图像重构以及图像质量评价结合起来,同时实现了相位误差估计、补偿、重构与评估四个步骤,通过缩小迭代相位误差估计偏移量逐级
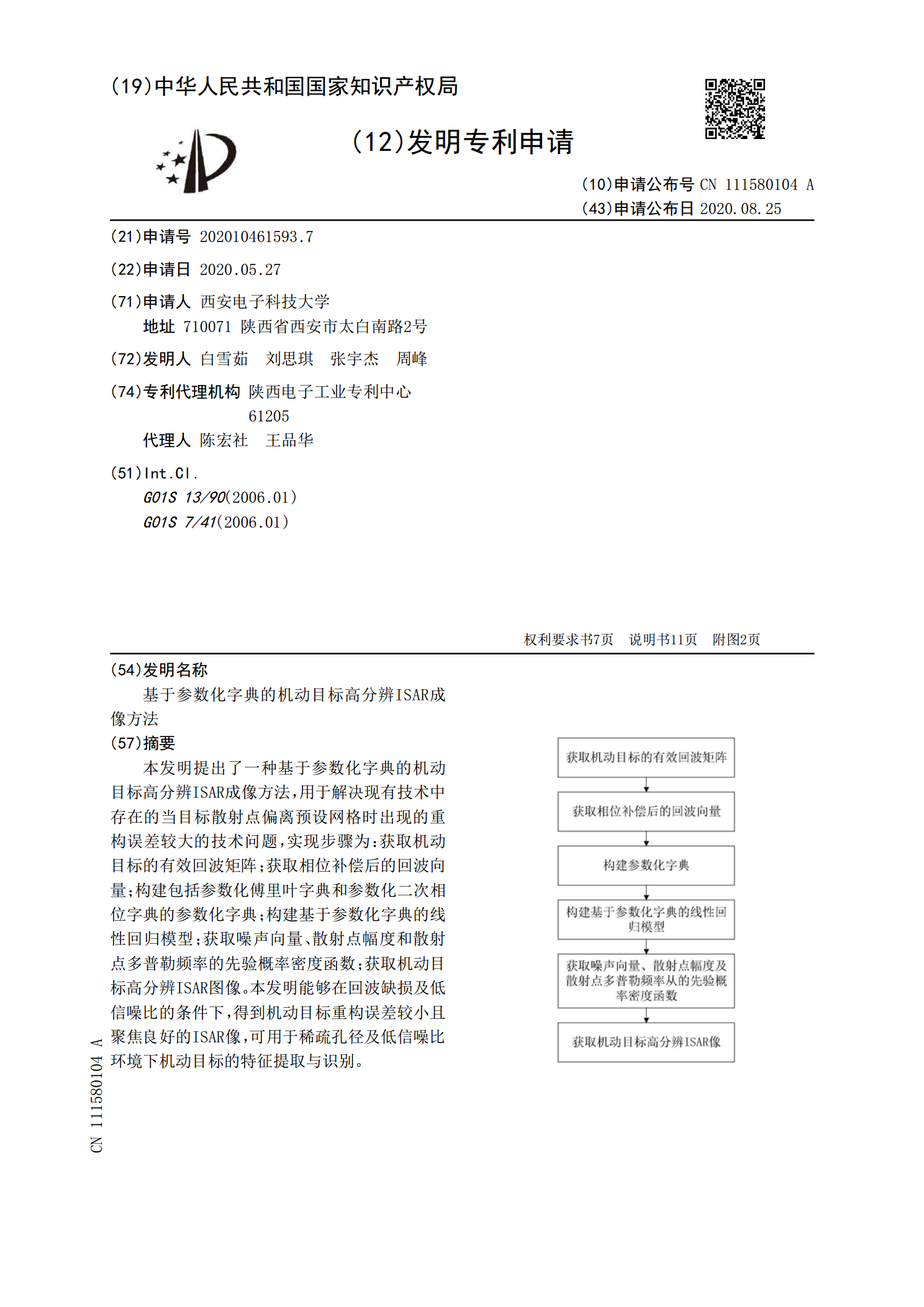
基于参数化字典的机动目标高分辨ISAR成像方法.pdf
本发明提出了一种基于参数化字典的机动目标高分辨ISAR成像方法,用于解决现有技术中存在的当目标散射点偏离预设网格时出现的重构误差较大的技术问题,实现步骤为:获取机动目标的有效回波矩阵;获取相位补偿后的回波向量;构建包括参数化傅里叶字典和参数化二次相位字典的参数化字典;构建基于参数化字典的线性回归模型;获取噪声向量、散射点幅度和散射点多普勒频率的先验概率密度函数;获取机动目标高分辨ISAR图像。本发明能够在回波缺损及低信噪比的条件下,得到机动目标重构误差较小且聚焦良好的ISAR像,可用于稀疏孔径及低信噪比环
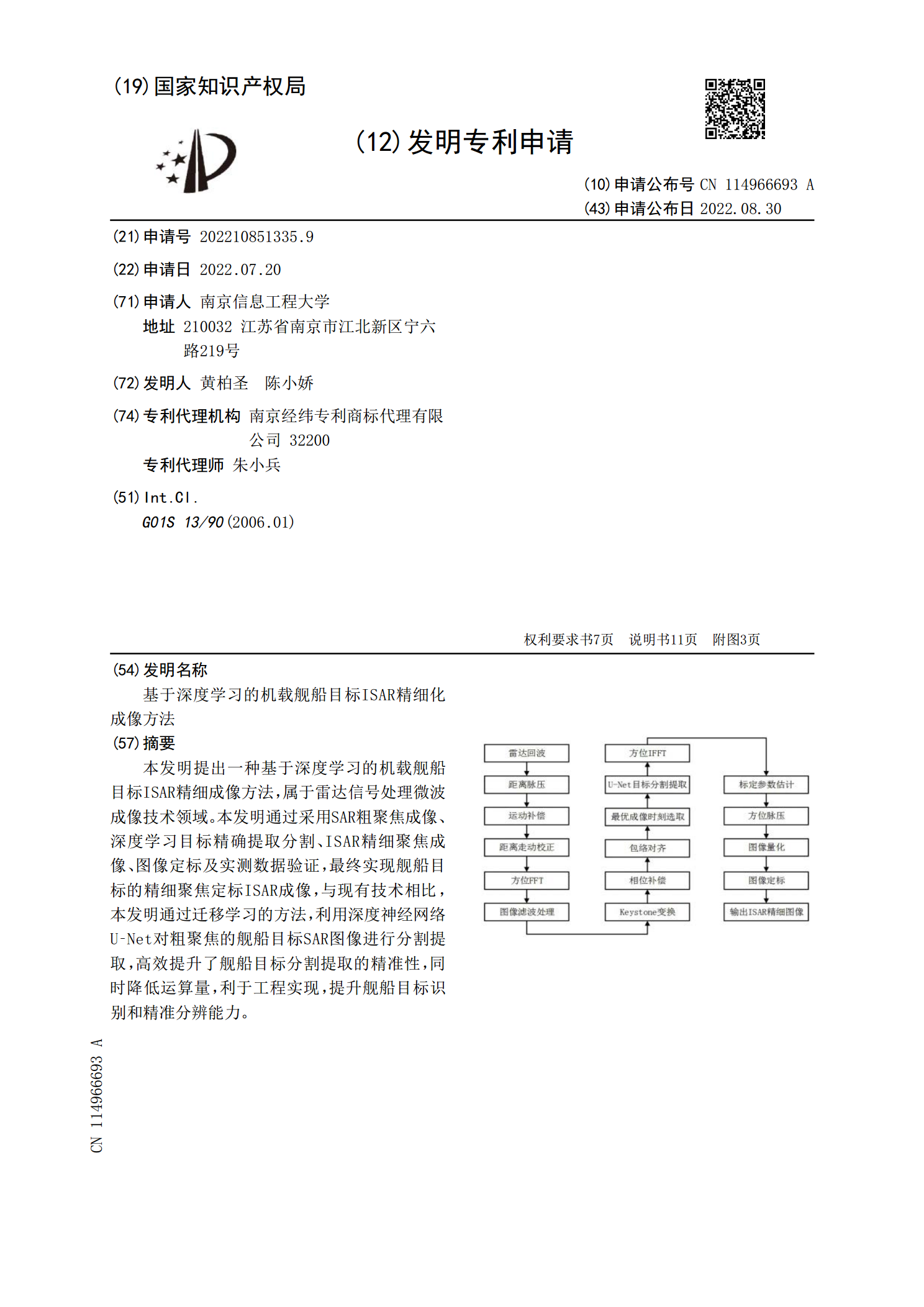
基于深度学习的机载舰船目标ISAR精细化成像方法.pdf
本发明提出一种基于深度学习的机载舰船目标ISAR精细成像方法,属于雷达信号处理微波成像技术领域。本发明通过采用SAR粗聚焦成像、深度学习目标精确提取分割、ISAR精细聚焦成像、图像定标及实测数据验证,最终实现舰船目标的精细聚焦定标ISAR成像,与现有技术相比,本发明通过迁移学习的方法,利用深度神经网络U‑Net对粗聚焦的舰船目标SAR图像进行分割提取,高效提升了舰船目标分割提取的精准性,同时降低运算量,利于工程实现,提升舰船目标识别和精准分辨能力。