
基于图像质量引导的稀疏孔径ISAR成像相位自聚焦方法.pdf

佳晨****ng

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于图像质量引导的稀疏孔径ISAR成像相位自聚焦方法.pdf
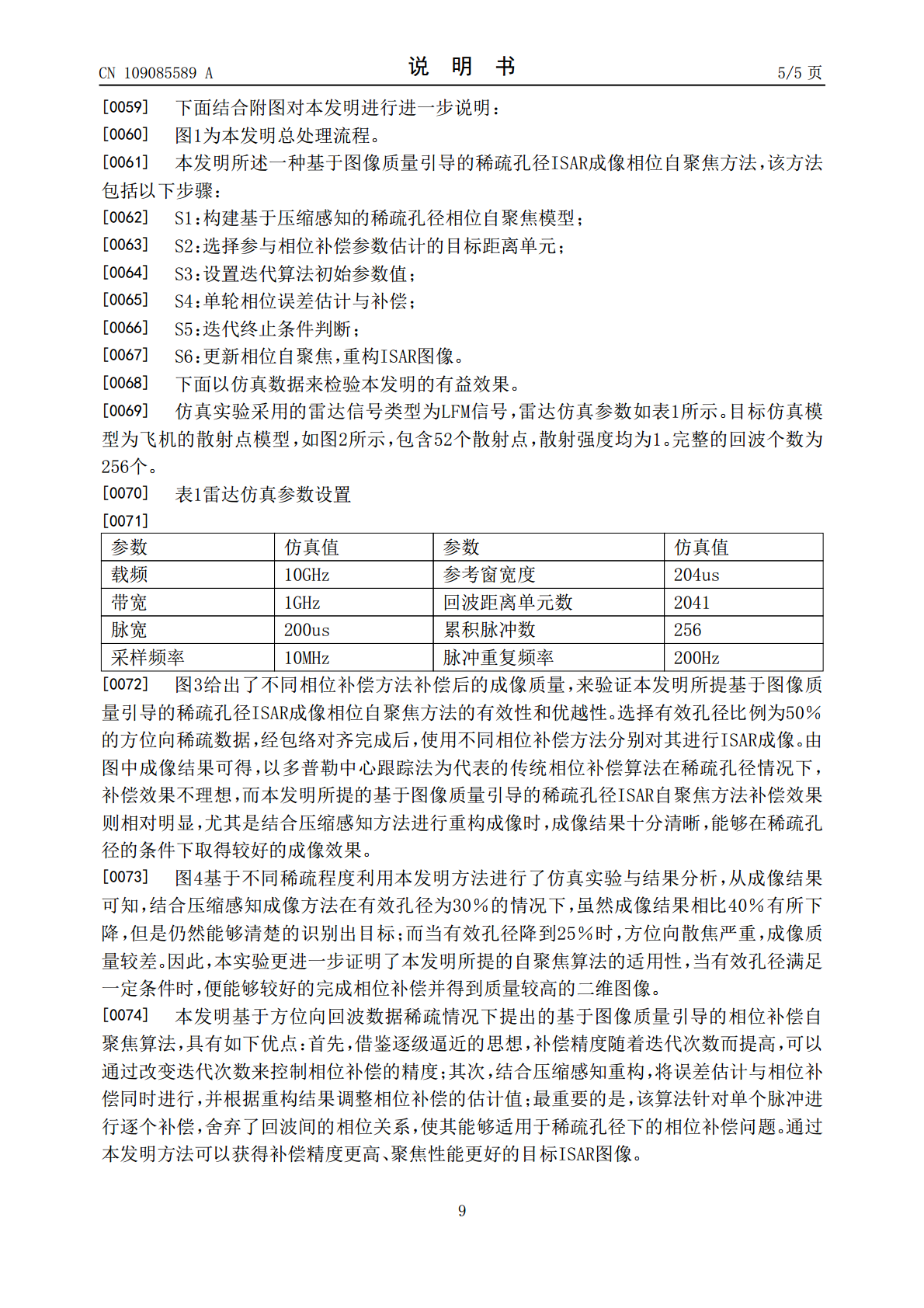
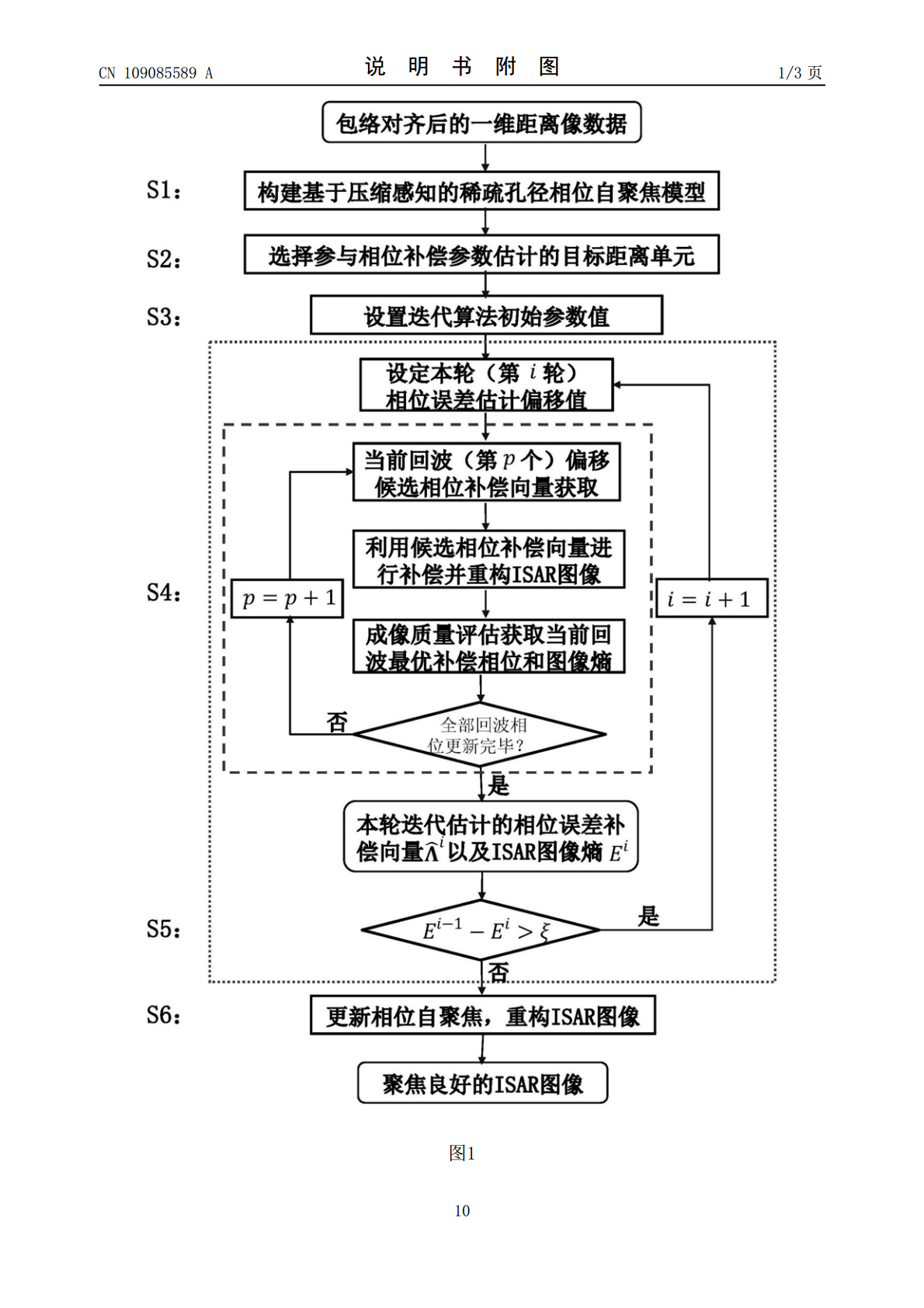
本发明涉及逆合成孔径雷达成像信号处理技术,尤其涉及一种基于图像质量引导的稀疏孔径ISAR成像相位自聚焦方法,包括以下步骤:S1:构建基于压缩感知的稀疏孔径相位自聚焦模型;S2:选择参与相位补偿参数估计的目标距离单元;S3:设置迭代算法初始参数值;S4:单轮相位误差估计与补偿;S5:迭代终止条件判断;S6:更新相位自聚焦,重构ISAR图像。本发明将稀疏孔径下的ISAR成像相位自聚焦、ISAR图像重构以及图像质量评价结合起来,同时实现了相位误差估计、补偿、重构与评估四个步骤,通过缩小迭代相位误差估计偏移量逐级

基于贝叶斯学习的稀疏孔径ISAR自聚焦与横向定标方法.pdf
本发明属于雷达信号处理领域,具体涉及一种基于贝叶斯学习的稀疏孔径ISAR自聚焦与横向定标方法。该方法首先利用拉普拉斯分层模型对ISAR图像进行稀疏先验建模,再利用变分贝叶斯方法对ISAR图像进行稀疏重构,在ISAR图像重构过程中,利用修正牛顿迭代方法,同时估计相位误差与目标转速,以实现稀疏孔径条件下的ISAR自聚焦与横向定标。本发明取得的有益效果为:通过本发明可实现稀疏孔径条件下的ISAR自聚焦与横向定标,在低信噪比、强干扰、有效孔径不足等因素引起的雷达回波数据孔径稀疏条件下,仍可获取聚焦效果好、分辨率高
稀疏孔径ISAR机动目标成像与定标方法.pdf
本发明公开了一种稀疏孔径ISAR机动目标成像与定标方法,包括如下步骤:建立机动目标ISAR稀疏孔径信号模型,通过构造包含MTRC的变尺度非均匀傅里叶二维字典以表征目标机动性;通过最大后验估计构造参数化稀疏成像模型,表示为联合目标参数估计和稀疏成像的代价函数;通过最小熵法寻找目标转动参数,通过坐标下降法进行参数迭代实现对机动目标旋转参数的粗估计;通过联合稀疏ISAR成像和目标转动参数估计,分解为稀疏成像和字典学习,依次迭代求解,实现具有MTRC校正和精确参数估计的高质量成像。本发明实现了利用稀疏孔径回波数据
基于C-ADMMN的结构化稀疏孔径ISAR成像方法.pdf
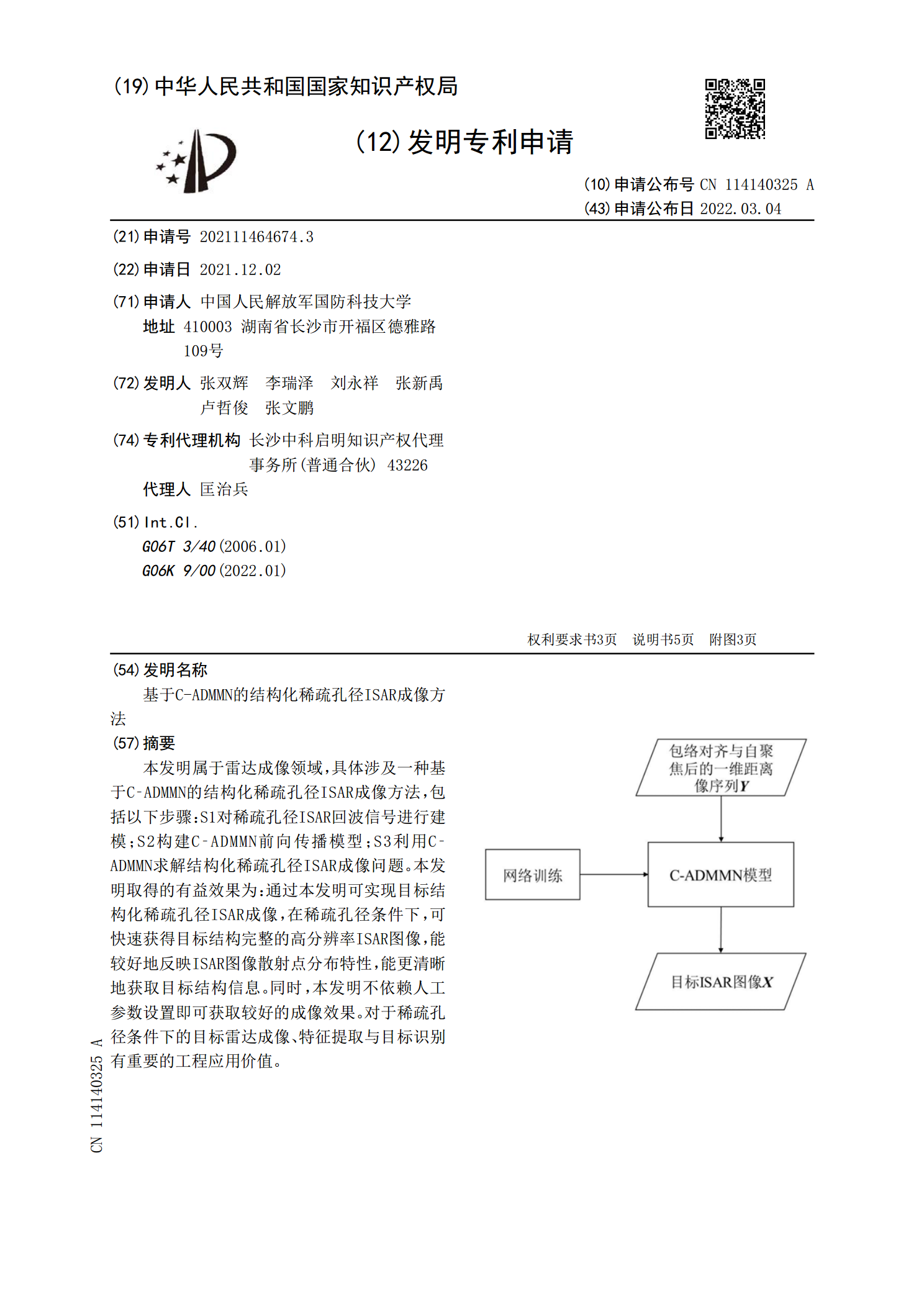
本发明属于雷达成像领域,具体涉及一种基于C‑ADMMN的结构化稀疏孔径ISAR成像方法,包括以下步骤:S1对稀疏孔径ISAR回波信号进行建模;S2构建C‑ADMMN前向传播模型;S3利用C‑ADMMN求解结构化稀疏孔径ISAR成像问题。本发明取得的有益效果为:通过本发明可实现目标结构化稀疏孔径ISAR成像,在稀疏孔径条件下,可快速获得目标结构完整的高分辨率ISAR图像,能较好地反映ISAR图像散射点分布特性,能更清晰地获取目标结构信息。同时,本发明不依赖人工参数设置即可获取较好的成像效果。对于稀疏孔径条件

一种双基地ISAR稀疏孔径成像方法.pdf
本发明提供了一种双基地ISAR稀疏孔径成像方法,涉及雷达信号处理技术领域,主要解决稀疏孔径条件下双基地ISAR成像分辨率低、运算时间长等问题。本发明实现过程为:建立双基地ISAR回波模型,对平动补偿后的回波进一步进行多普勒位移补偿,得到全孔径回波数据;对回波进行稀疏表示,建立基于压缩感知的双基地ISAR稀疏孔径回波模型;将整个二维回波数据进行分块处理,并假设目标图像各像元服从高斯先验建立稀疏贝叶斯模型;利用快速边缘似然函数最大化方法求解得到高质量目标图像;将所求的每块回波对应的目标图像合成整个二维图像,得