
基于深度学习的机载舰船目标ISAR精细化成像方法.pdf

小新****ou


1/10
2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于深度学习的机载舰船目标ISAR精细化成像方法.pdf
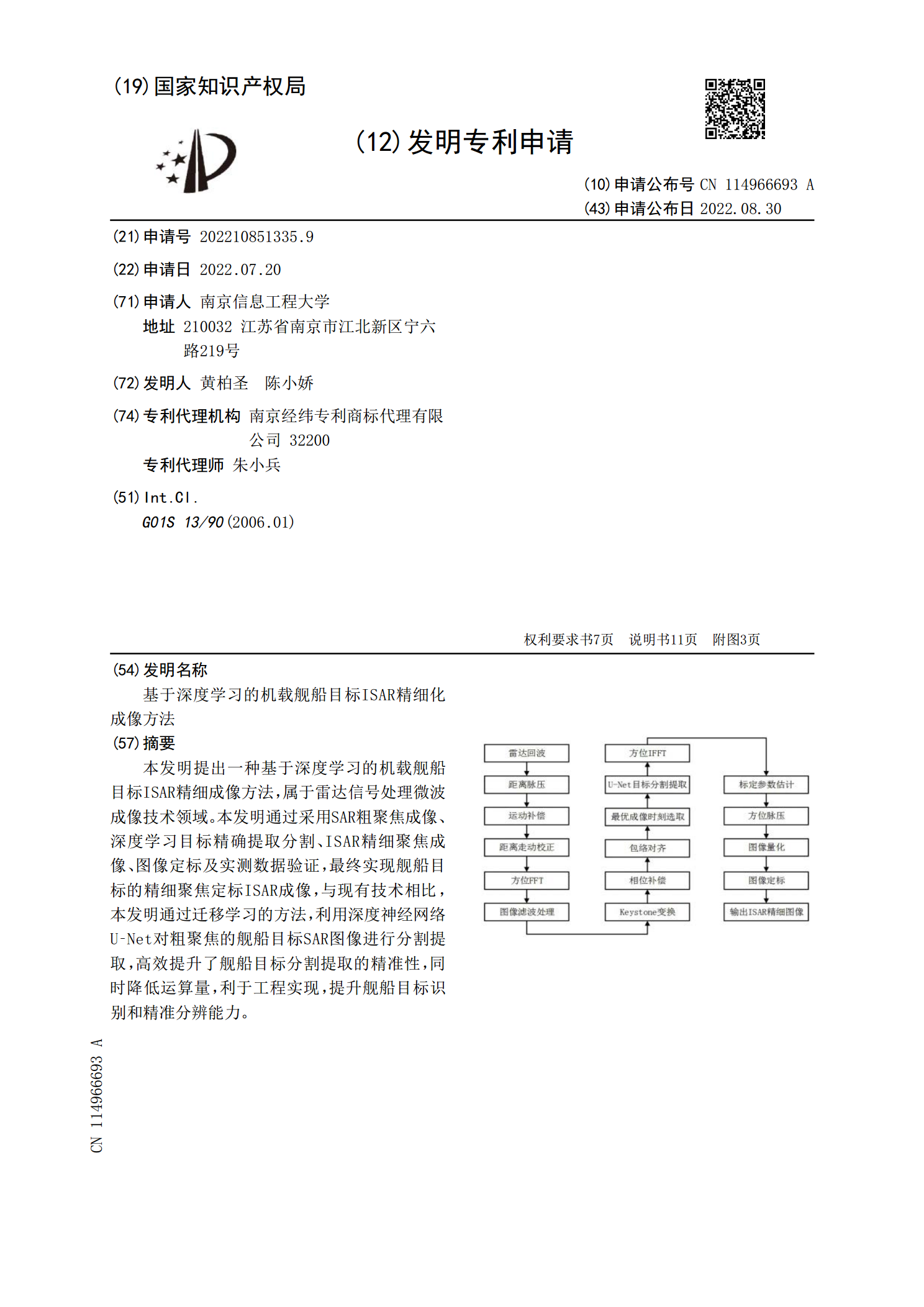
本发明提出一种基于深度学习的机载舰船目标ISAR精细成像方法,属于雷达信号处理微波成像技术领域。本发明通过采用SAR粗聚焦成像、深度学习目标精确提取分割、ISAR精细聚焦成像、图像定标及实测数据验证,最终实现舰船目标的精细聚焦定标ISAR成像,与现有技术相比,本发明通过迁移学习的方法,利用深度神经网络U‑Net对粗聚焦的舰船目标SAR图像进行分割提取,高效提升了舰船目标分割提取的精准性,同时降低运算量,利于工程实现,提升舰船目标识别和精准分辨能力。

机载雷达海面舰船目标ISAR成像技术研究.docx
机载雷达海面舰船目标ISAR成像技术研究摘要机载雷达海面目标ISAR成像技术是一种能够进行海面舰船目标成像的高分辨率技术,它能够有效地处理复杂的海面干扰,提高监测和识别的准确性和可靠性。本文对机载雷达海面舰船目标ISAR成像技术进行了系统的研究和分析,讨论了其成像原理和算法,并且对其在实际应用中存在的问题和可改进的措施进行了探讨。关键词:机载雷达;ISAR成像;海面舰船目标;成像原理;算法分析一、介绍机载雷达海面目标ISAR成像技术是一种通过机载雷达扫描海面舰船目标并将其成像的技术。与传统的雷达成像技术相

一种基于深度学习的机动目标ISAR自聚焦成像方法.pdf
一种基于深度学习的机动目标ISAR自聚焦成像方法,本发明涉及基于深度学习的机动目标ISAR自聚焦成像方法。本发明的目的是为了解决现有机动目标的ISAR像存在分辨率低和噪声干扰等问题。过程为:一、设定最大循环次数T;设循环次数为1,设定机动目标形态及运动参数初值;二、获得ISAR图像;三、获得目标的参考图像;四、判断是否达到T,若没达到,令循环次数加1,随机改变机动目标形态及运动参数初值;重复执行二三,直至达到T,得到T组目标的ISAR图像和参考图像;五、构建ResU‑Net网络;六、获得待测目标回波,经过

FMCW-ISAR对舰船目标成像脉内补偿方法研究.docx
FMCW-ISAR对舰船目标成像脉内补偿方法研究论文题目:FMCW-ISAR对舰船目标成像脉内补偿方法研究摘要:随着雷达技术的不断发展,对舰船目标的成像技术也得到了广泛的研究和应用。FMCW-ISAR是一种常用的舰船目标成像技术,但在实际应用中存在脉内扰动导致图像失真的问题。因此,本文针对FMCW-ISAR对舰船目标的成像,在脉内补偿方法的研究方面进行了深入探讨。通过研究FMCW-ISAR工作原理、舰船目标特点以及脉内扰动成因,提出了一种有效的脉内补偿方法,并进行了仿真与实验验证。结果表明,所提出的脉内补

基于MPSoC的舰船目标ISAR实时成像处理技术研究的开题报告.docx
基于MPSoC的舰船目标ISAR实时成像处理技术研究的开题报告一、研究背景及意义在舰船任务中,目标识别和跟踪对于提高作战效率和保卫国家安全至关重要。针对舰船目标,ISAR(InverseSyntheticApertureRadar)成像技术具有一定优势。ISAR在频域上应用了SAR(SyntheticApertureRadar)的信号处理方法,通过目标的旋转来合成高分辨率图像。随着科技的发展,现代舰船通常搭载着高效率、高性能的MPSoC(Multi-ProcessingSystemonChip)芯片,能够