
一种机器人乘梯路径规划方法、系统及相关产品.pdf

诗文****仙女

1/10
2/10
3/10

4/10
5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种机器人乘梯路径规划方法、系统及相关产品.pdf
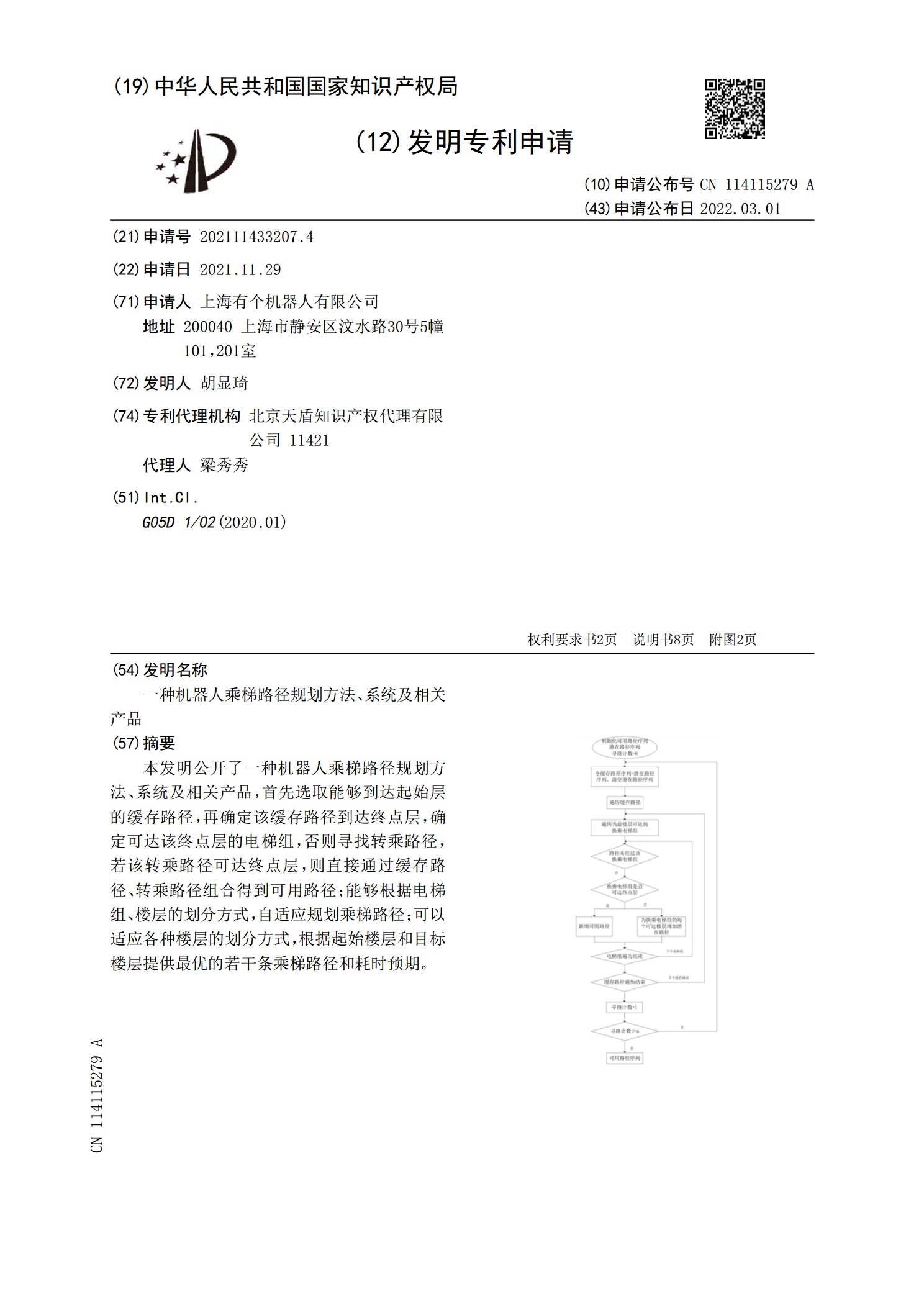
本发明公开了一种机器人乘梯路径规划方法、系统及相关产品,首先选取能够到达起始层的缓存路径,再确定该缓存路径到达终点层,确定可达该终点层的电梯组,否则寻找转乘路径,若该转乘路径可达终点层,则直接通过缓存路径、转乘路径组合得到可用路径;能够根据电梯组、楼层的划分方式,自适应规划乘梯路径;可以适应各种楼层的划分方式,根据起始楼层和目标楼层提供最优的若干条乘梯路径和耗时预期。

一种机器人乘梯方法.pdf
本申请提供一种机器人乘梯方法,涉及物联网技术领域,该方法包括:机器人首先发送呼叫电梯请求,以使电梯停靠在所述机器人的所在楼层;在接收到电梯发送的等待进入电梯的指示后,行驶至所述电梯轿厢内;然后发送乘梯请求给所述电梯,以使所述电梯停靠在所述机器人的目的楼层;在接收到所述电梯发送的等待离开电梯的指示后,行驶出所述电梯轿厢。该方法可以实现机器人跨楼层作业,以及通过与电梯的通信实现对于电梯的调度以使机器人实现自主乘梯。

一种基于主控式派梯请求的机器人乘梯方法和系统.pdf
本发明公开一种基于主控式派梯请求的机器人乘梯方法和系统。方法包括:机器人生成唯一对应的乘梯任务报文,并经云服务器发送至主控式派梯控制器;主控式派梯控制器根据乘梯任务报文的任务ID判断对应的乘梯任务是否完成,并将未完成的目标乘梯任务封装成派梯请求报文发送至电梯主控制器;电梯主控制器生成对应目标乘梯任务的电梯调度结果,打包成派梯调度报文,并依次经主控式派梯控制器和云服务器回传至目标机器人;目标机器人判断电梯调度结果的任务ID与自己的任务ID是否一致,当一致时执行预设乘梯逻辑。本发明可以方便机器人乘坐有派梯系统
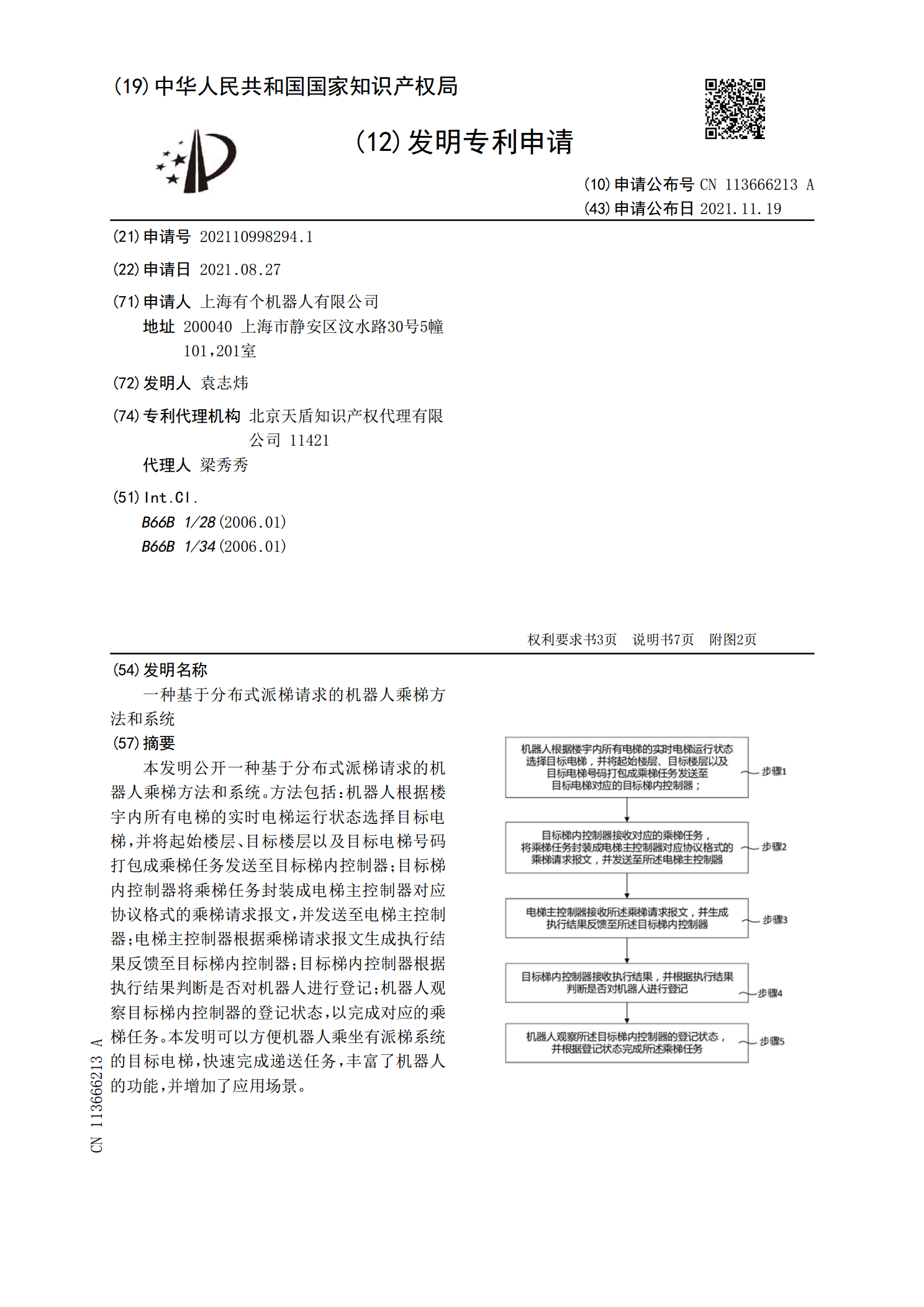
一种基于分布式派梯请求的机器人乘梯方法和系统.pdf
本发明公开一种基于分布式派梯请求的机器人乘梯方法和系统。方法包括:机器人根据楼宇内所有电梯的实时电梯运行状态选择目标电梯,并将起始楼层、目标楼层以及目标电梯号码打包成乘梯任务发送至目标梯内控制器;目标梯内控制器将乘梯任务封装成电梯主控制器对应协议格式的乘梯请求报文,并发送至电梯主控制器;电梯主控制器根据乘梯请求报文生成执行结果反馈至目标梯内控制器;目标梯内控制器根据执行结果判断是否对机器人进行登记;机器人观察目标梯内控制器的登记状态,以完成对应的乘梯任务。本发明可以方便机器人乘坐有派梯系统的目标电梯,快速
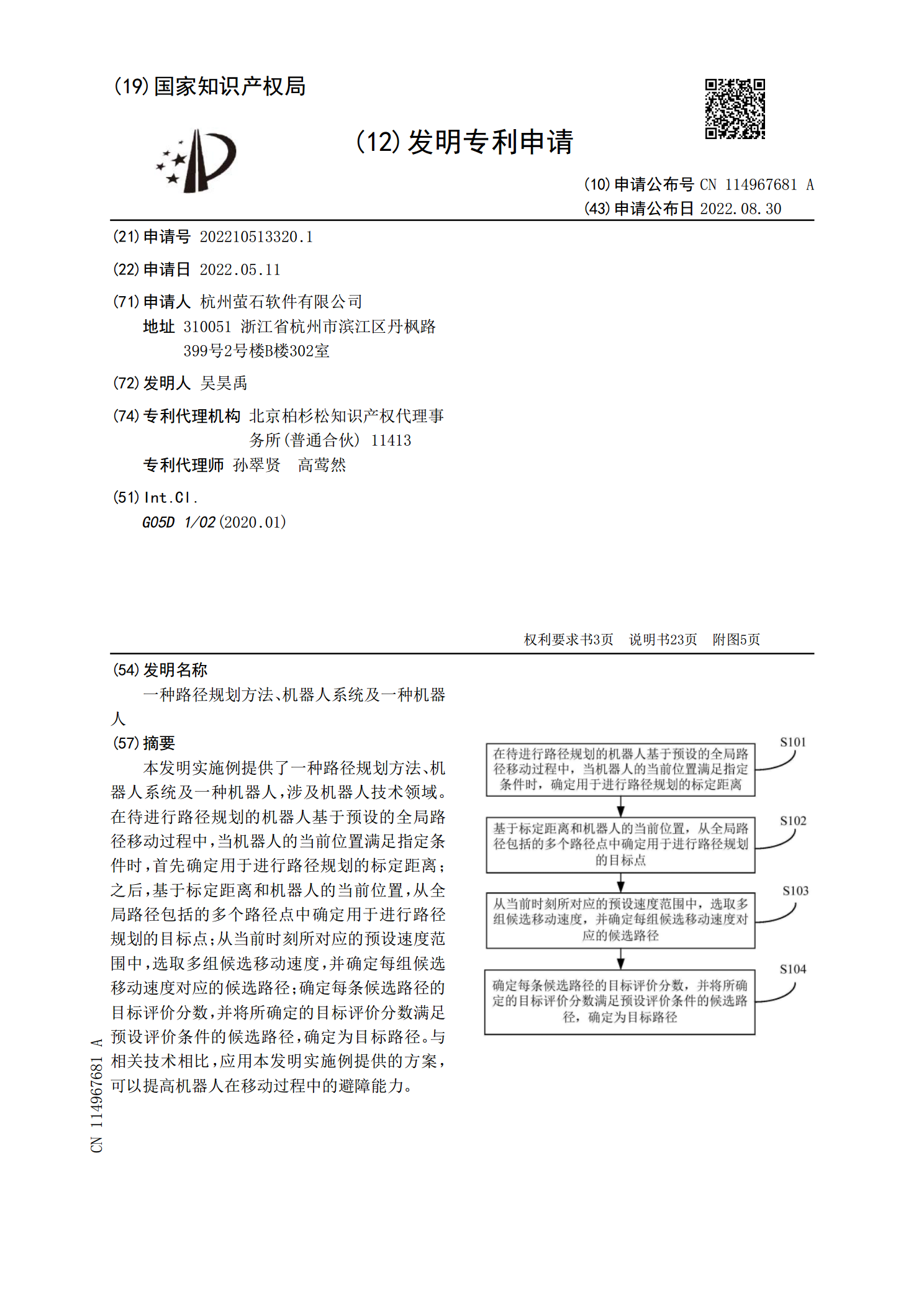
一种路径规划方法、机器人系统及一种机器人.pdf
本发明实施例提供了一种路径规划方法、机器人系统及一种机器人,涉及机器人技术领域。在待进行路径规划的机器人基于预设的全局路径移动过程中,当机器人的当前位置满足指定条件时,首先确定用于进行路径规划的标定距离;之后,基于标定距离和机器人的当前位置,从全局路径包括的多个路径点中确定用于进行路径规划的目标点;从当前时刻所对应的预设速度范围中,选取多组候选移动速度,并确定每组候选移动速度对应的候选路径;确定每条候选路径的目标评价分数,并将所确定的目标评价分数满足预设评价条件的候选路径,确定为目标路径。与相关技术相比,