
机器人运动规划方法及装置、机器人控制设备和存储介质.pdf

是来****文章


1/10
2/10
3/10

4/10
5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机器人运动规划方法及装置、机器人控制设备和存储介质.pdf
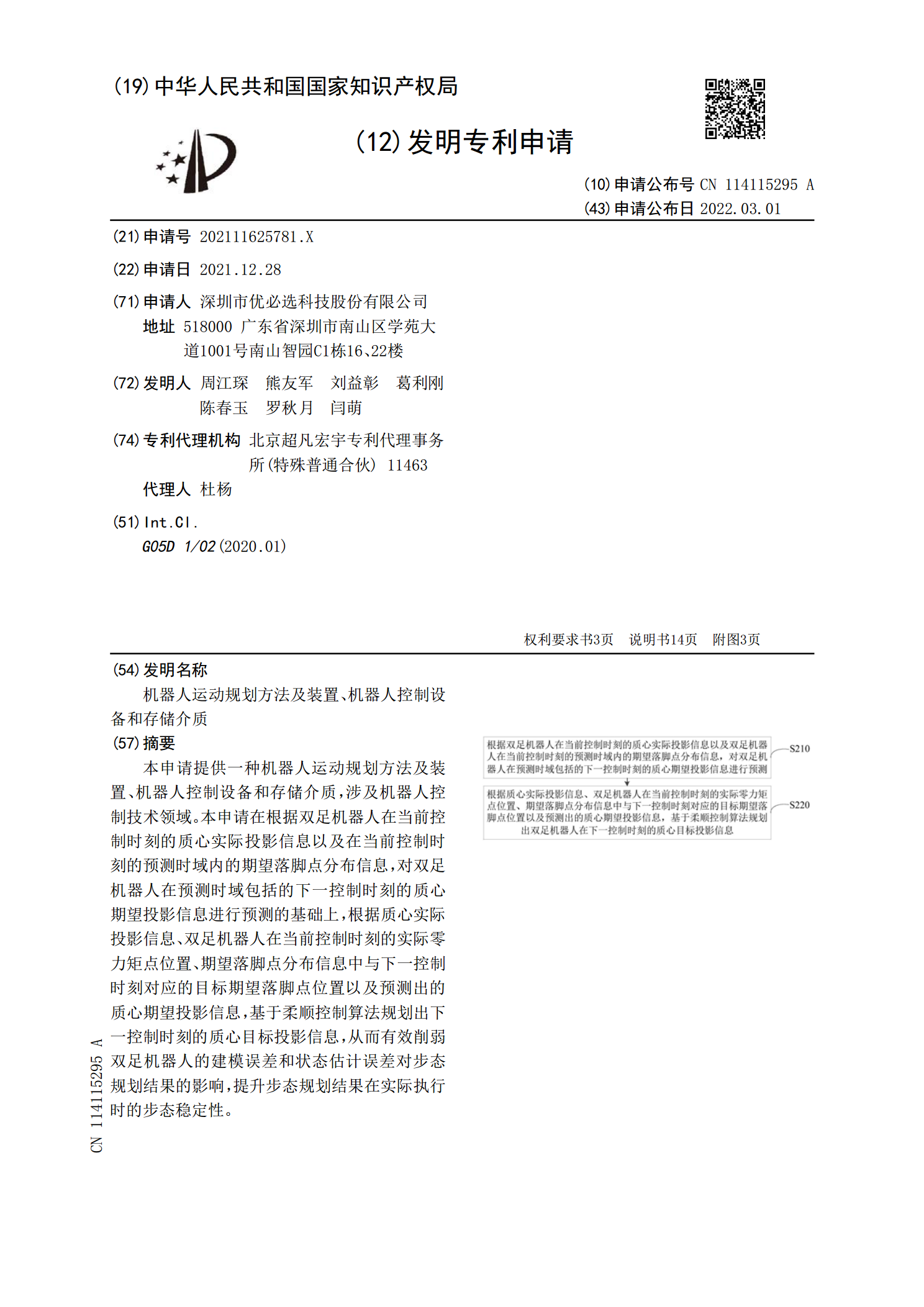
本申请提供一种机器人运动规划方法及装置、机器人控制设备和存储介质,涉及机器人控制技术领域。本申请在根据双足机器人在当前控制时刻的质心实际投影信息以及在当前控制时刻的预测时域内的期望落脚点分布信息,对双足机器人在预测时域包括的下一控制时刻的质心期望投影信息进行预测的基础上,根据质心实际投影信息、双足机器人在当前控制时刻的实际零力矩点位置、期望落脚点分布信息中与下一控制时刻对应的目标期望落脚点位置以及预测出的质心期望投影信息,基于柔顺控制算法规划出下一控制时刻的质心目标投影信息,从而有效削弱双足机器人的建模误
机器人运动控制方法及装置、机器人控制设备和存储介质.pdf
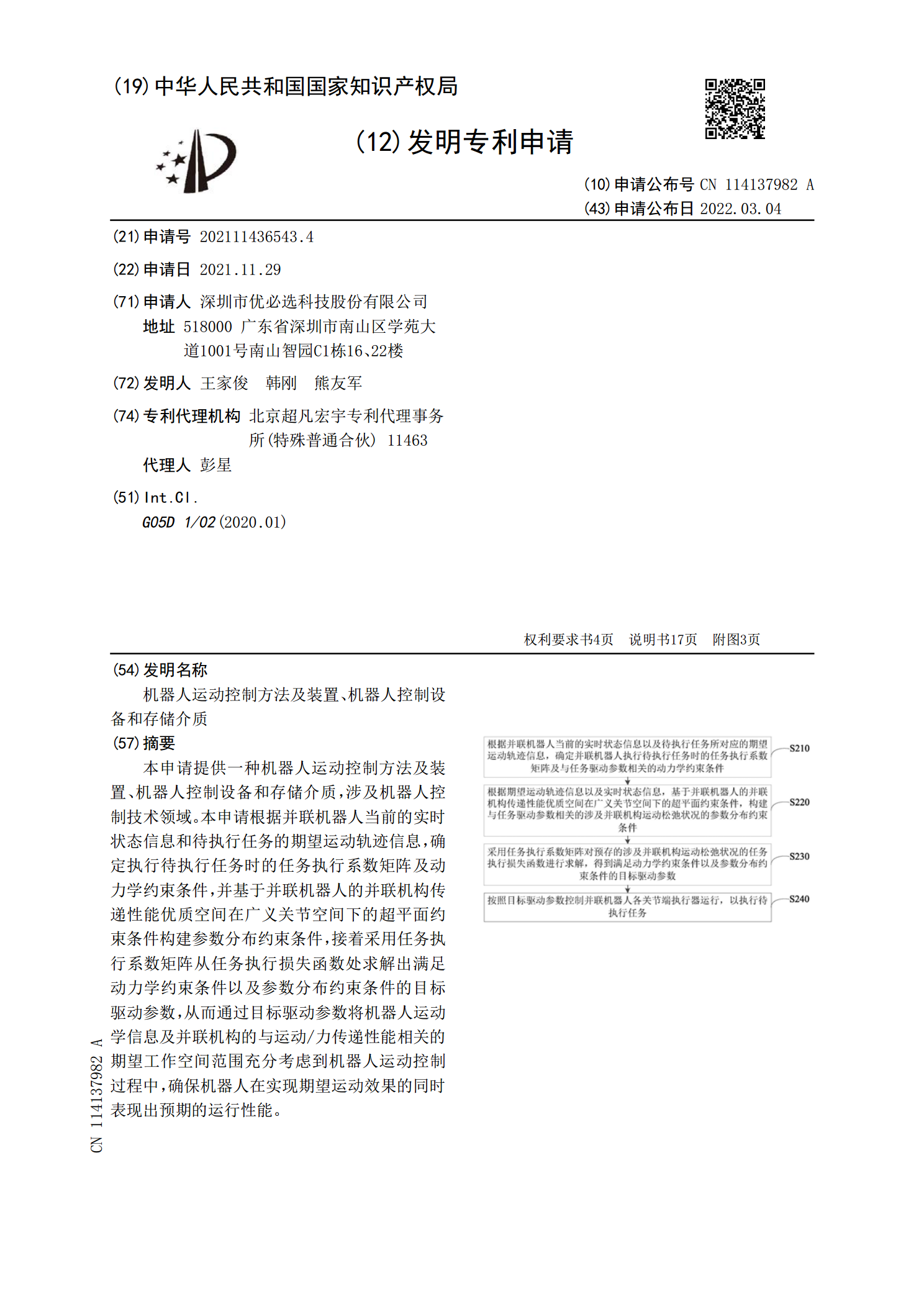
本申请提供一种机器人运动控制方法及装置、机器人控制设备和存储介质,涉及机器人控制技术领域。本申请根据并联机器人当前的实时状态信息和待执行任务的期望运动轨迹信息,确定执行待执行任务时的任务执行系数矩阵及动力学约束条件,并基于并联机器人的并联机构传递性能优质空间在广义关节空间下的超平面约束条件构建参数分布约束条件,接着采用任务执行系数矩阵从任务执行损失函数处求解出满足动力学约束条件以及参数分布约束条件的目标驱动参数,从而通过目标驱动参数将机器人运动学信息及并联机构的与运动/力传递性能相关的期望工作空间范围充分

机器人步态规划方法及装置、运动规划设备和存储介质.pdf
本申请提供一种机器人步态规划方法及装置、运动规划设备和存储介质,涉及机器人控制技术领域。本申请根据仿人机器人在当前时刻的质心高度实时信息、当前步态周期末尾的第一质心高度期望信息以及下一步态周期末尾的第二质心高度期望信息,规划当前步态周期的剩余迈步时间段的第一质心高度变化轨迹和下一步态周期的第二质心高度变化轨迹,进而通过第一质心高度变化轨迹、第二质心高度变化轨迹、当前时刻的质心前向实时信息及下一步态周期末尾的质心前向期望终止速度,计算出当前步态周期末尾的质心前向期望信息以及落足点期望位置,从而基于机器人实时
机器人运动控制方法、装置、设备及存储介质.pdf
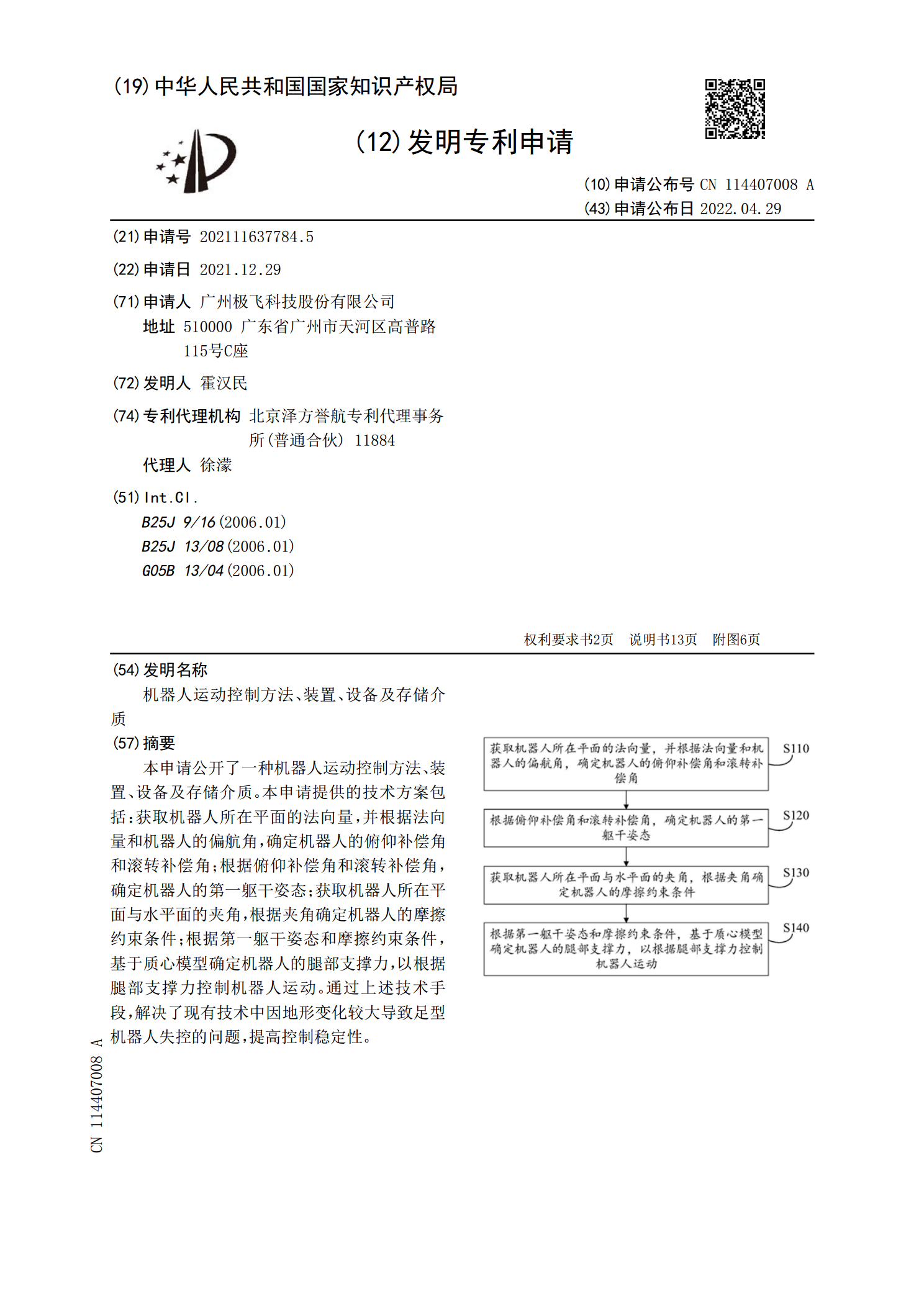
本申请公开了一种机器人运动控制方法、装置、设备及存储介质。本申请提供的技术方案包括:获取机器人所在平面的法向量,并根据法向量和机器人的偏航角,确定机器人的俯仰补偿角和滚转补偿角;根据俯仰补偿角和滚转补偿角,确定机器人的第一躯干姿态;获取机器人所在平面与水平面的夹角,根据夹角确定机器人的摩擦约束条件;根据第一躯干姿态和摩擦约束条件,基于质心模型确定机器人的腿部支撑力,以根据腿部支撑力控制机器人运动。通过上述技术手段,解决了现有技术中因地形变化较大导致足型机器人失控的问题,提高控制稳定性。
机器人的控制方法、装置、机器人设备和存储介质.pdf
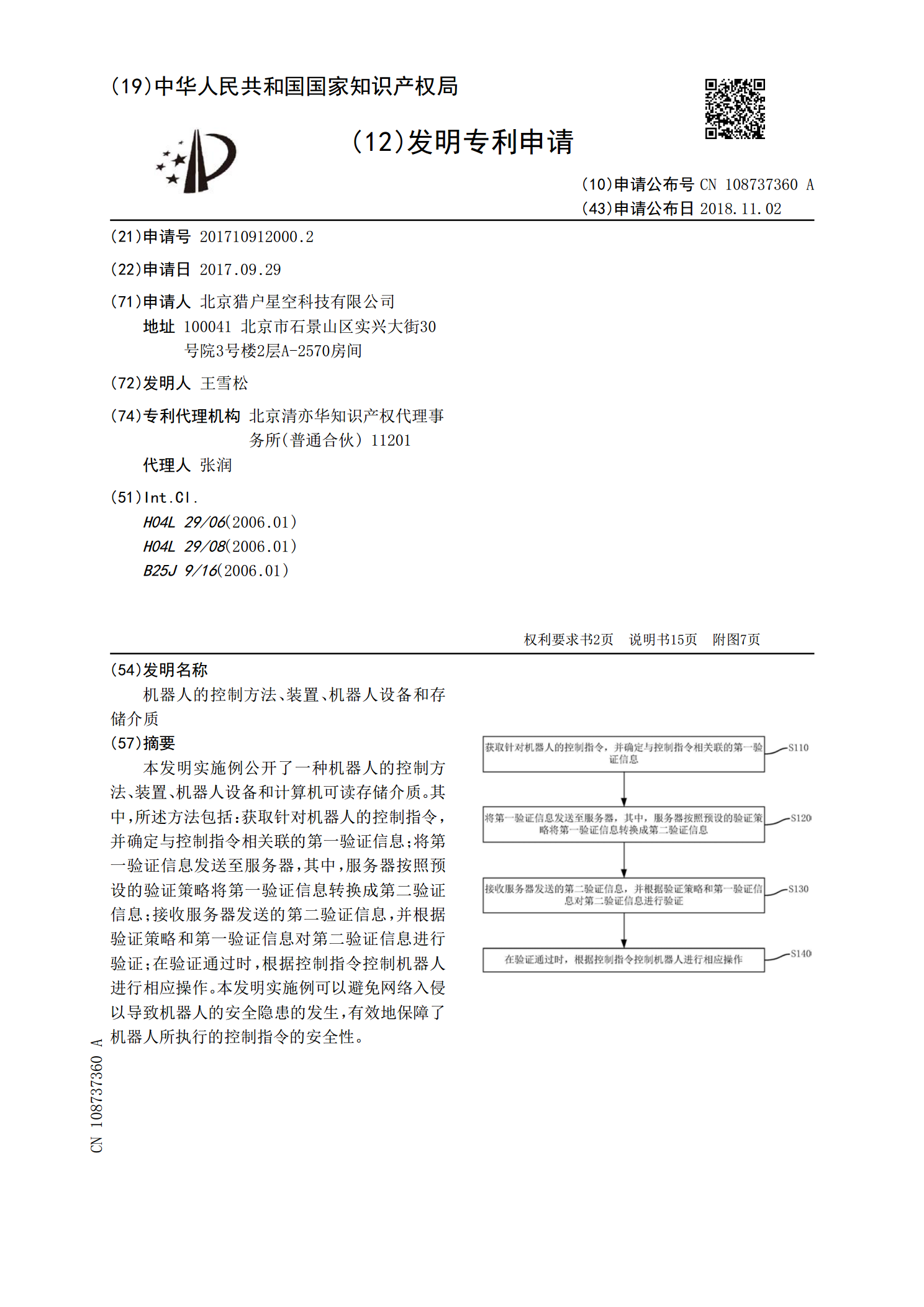
本发明实施例公开了一种机器人的控制方法、装置、机器人设备和计算机可读存储介质。其中,所述方法包括:获取针对机器人的控制指令,并确定与控制指令相关联的第一验证信息;将第一验证信息发送至服务器,其中,服务器按照预设的验证策略将第一验证信息转换成第二验证信息;接收服务器发送的第二验证信息,并根据验证策略和第一验证信息对第二验证信息进行验证;在验证通过时,根据控制指令控制机器人进行相应操作。本发明实施例可以避免网络入侵以导致机器人的安全隐患的发生,有效地保障了机器人所执行的控制指令的安全性。