
闸机阻挡部件的控制方法、闸机控制系统及设备.pdf

是立****92


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

闸机阻挡部件的控制方法、闸机控制系统及设备.pdf
本申请实施例公开了一种闸机阻挡部件的控制方法、闸机控制系统及设备,用以解决现有的闸机阻挡部件的控制方案不适用于低端场景的问题。该方法包括:响应于针对阻挡部件的对齐调整指令,控制阻挡部件向预设方向移动;对齐调整指令用于指示将阻挡部件调整至目标位置;在阻挡部件的移动过程中,通过位置检测装置检测阻挡部件是否移动至指定位置;当检测到阻挡部件位于指定位置时,根据指定位置和阻挡部件对应的目标位置之间的位置关系,控制阻挡部件移动至目标位置。该技术方案提高了对阻挡部件的位置的检测精确度,从而能够准确地控制阻挡部件移动至目

闸机阻挡部件的控制方法、闸机控制系统及设备.pdf
本申请实施例公开了一种闸机阻挡部件的控制方法、闸机控制系统及设备。所述方法包括:在阻挡部件处于移动状态时,监测阻挡部件的移动位置;若监测到阻挡部件移动至预设的第一刹车位置,则控制阻挡部件减速至第一速度,并继续移动;在阻挡部件继续移动的过程中,若监测到阻挡部件移动至预设的第二刹车位置,则控制阻挡部件进行减速,直至阻挡部件停止移动;其中,第二刹车位置与目标停止位置之间的距离小于第一刹车位置与目标停止位置之间的距离。该技术方案降低了阻挡部件在刹车过程中的抖动幅度和刹车距离,从而实现了闸机控制系统对阻挡部件的停止

闸机阻挡部件的自锁控制方法、闸机控制系统及设备.pdf
本申请实施例公开了一种闸机阻挡部件的自锁控制方法、闸机控制系统及设备,用以解决现有闸机阻挡部件的自锁方式难以兼顾阻挡部件的移动速度和自锁力矩、容易导致闸机损坏或自锁失败的问题。所述方法包括:确定闸机控制系统的闸机运行模式;若闸机运行模式为自锁模式,则控制可调减速器的减速比为自锁模式对应的第一减速比;控制闸机控制系统中的运行电流小于或等于预设电流阈值;控制阻挡部件按照第一减速比向目标位置的方向移动。该技术方案能够兼顾自锁模式时阻挡部件的自锁力矩、以及非自锁模式时阻挡部件的移动速度,同时能够避免因运行电流过大
闸机控制方法、装置、闸机、存储介质及产品.pdf
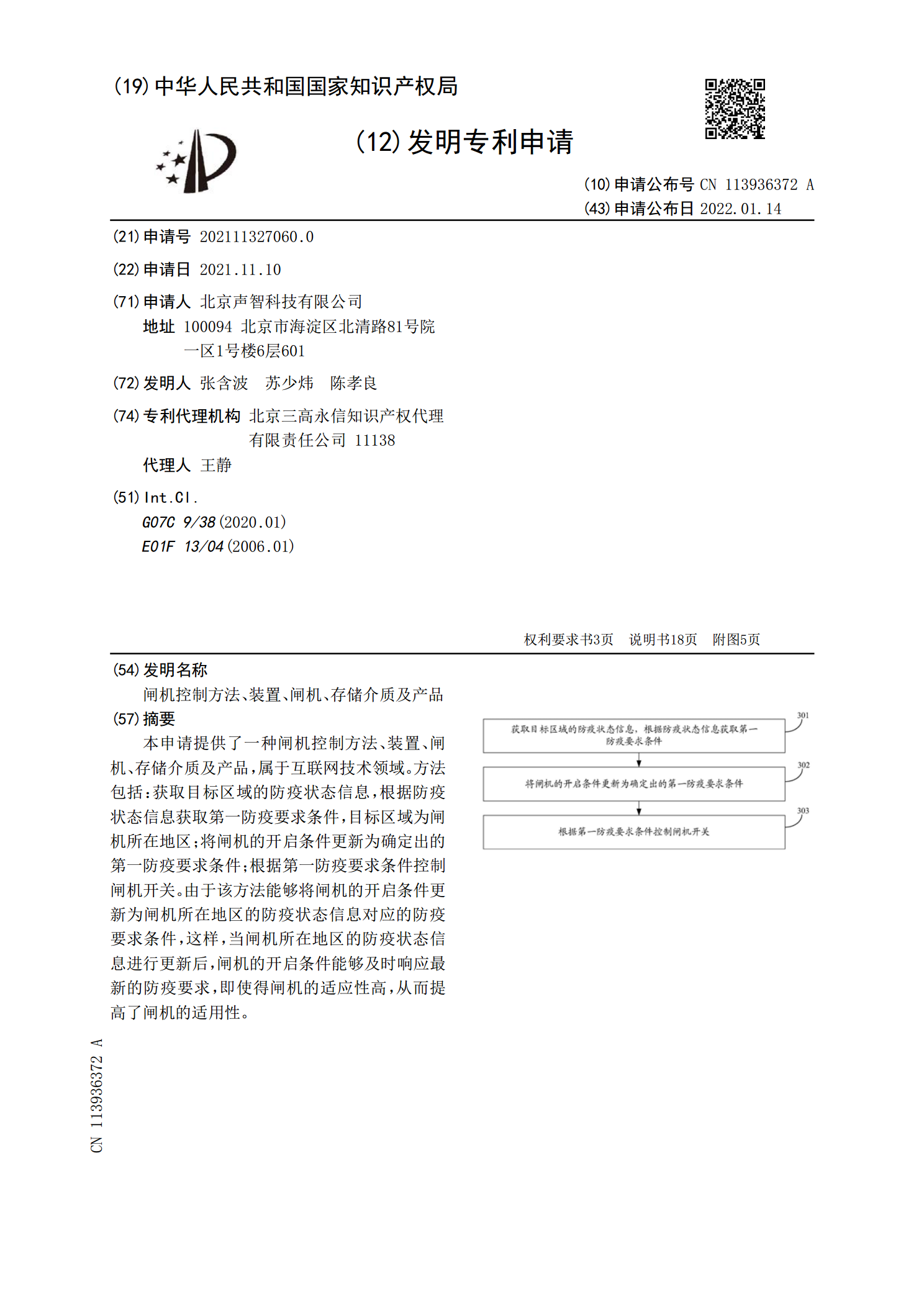
本申请提供了一种闸机控制方法、装置、闸机、存储介质及产品,属于互联网技术领域。方法包括:获取目标区域的防疫状态信息,根据防疫状态信息获取第一防疫要求条件,目标区域为闸机所在地区;将闸机的开启条件更新为确定出的第一防疫要求条件;根据第一防疫要求条件控制闸机开关。由于该方法能够将闸机的开启条件更新为闸机所在地区的防疫状态信息对应的防疫要求条件,这样,当闸机所在地区的防疫状态信息进行更新后,闸机的开启条件能够及时响应最新的防疫要求,即使得闸机的适应性高,从而提高了闸机的适用性。

扇形门闸机的阻挡机构.pdf
本发明公开了一种扇形门闸机的阻挡机构,包括电机、座体、一端部活动连接所述座体的底部的摇杆,固定于所述摇杆的外扇形门,内嵌于所述外扇形门的内扇形门,第一制动机构及第二制动机构。所述第一制动机构在所述电机的驱动下制动所述摇杆旋转,第二制动机构包括第一内门驱动件和第二内门驱动件,所述内扇形门在所述第一以及第二内门驱动件的驱动下旋转,相比现有的通过内齿轮、太阳轮以及行星轮之间的相互配合来实现所述内扇形门的旋转,本发明的扇形门闸机的阻挡机构组件少,结构简单,并且容易生产和实施。