
基于深度学习的立体匹配方法和系统.pdf

含秀****66

1/10
2/10

3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于深度学习的立体匹配方法和系统.pdf
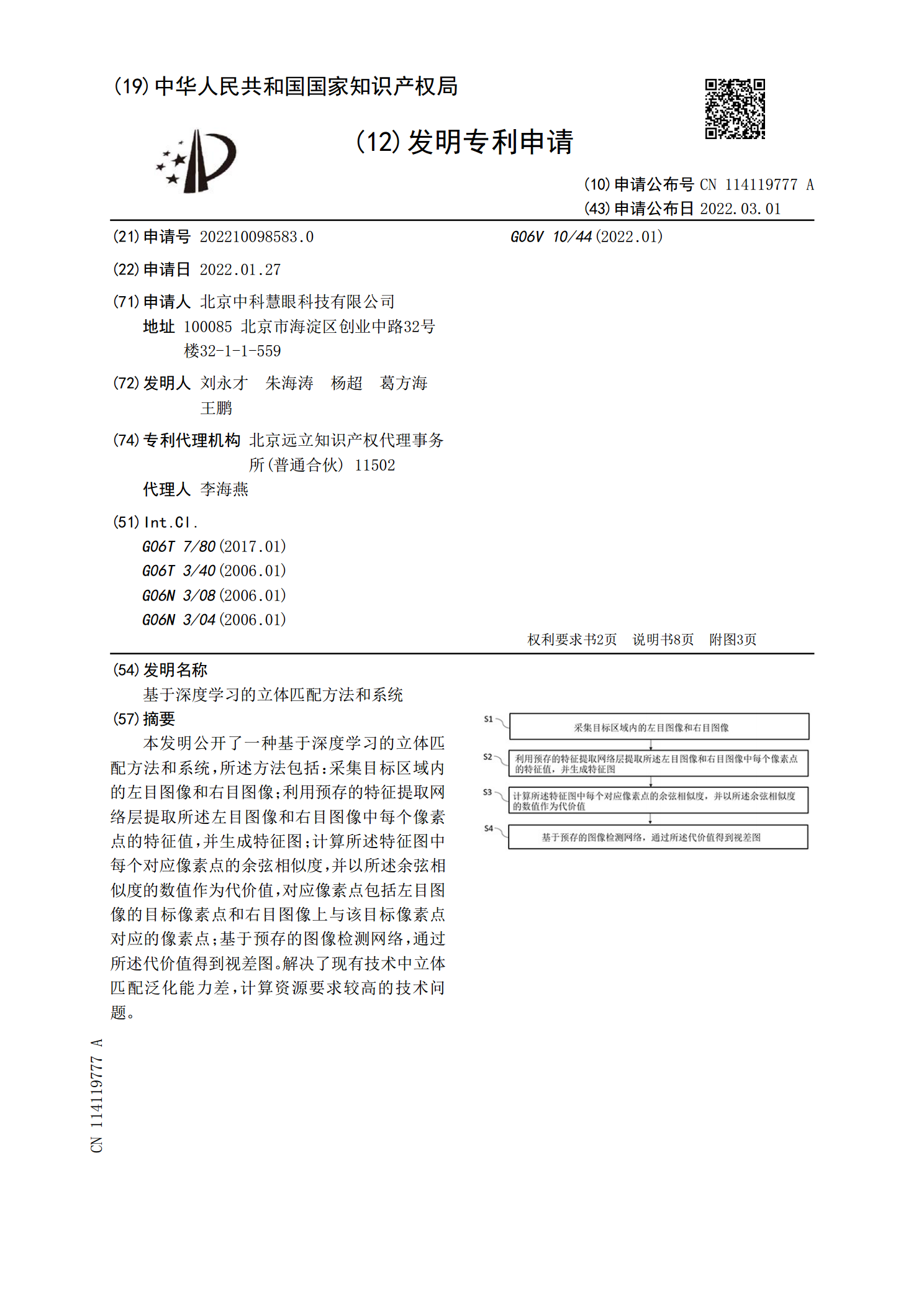
本发明公开了一种基于深度学习的立体匹配方法和系统,所述方法包括:采集目标区域内的左目图像和右目图像;利用预存的特征提取网络层提取所述左目图像和右目图像中每个像素点的特征值,并生成特征图;计算所述特征图中每个对应像素点的余弦相似度,并以所述余弦相似度的数值作为代价值,对应像素点包括左目图像的目标像素点和右目图像上与该目标像素点对应的像素点;基于预存的图像检测网络,通过所述代价值得到视差图。解决了现有技术中立体匹配泛化能力差,计算资源要求较高的技术问题。
基于双目立体匹配算法的代价聚合方法和系统.pdf
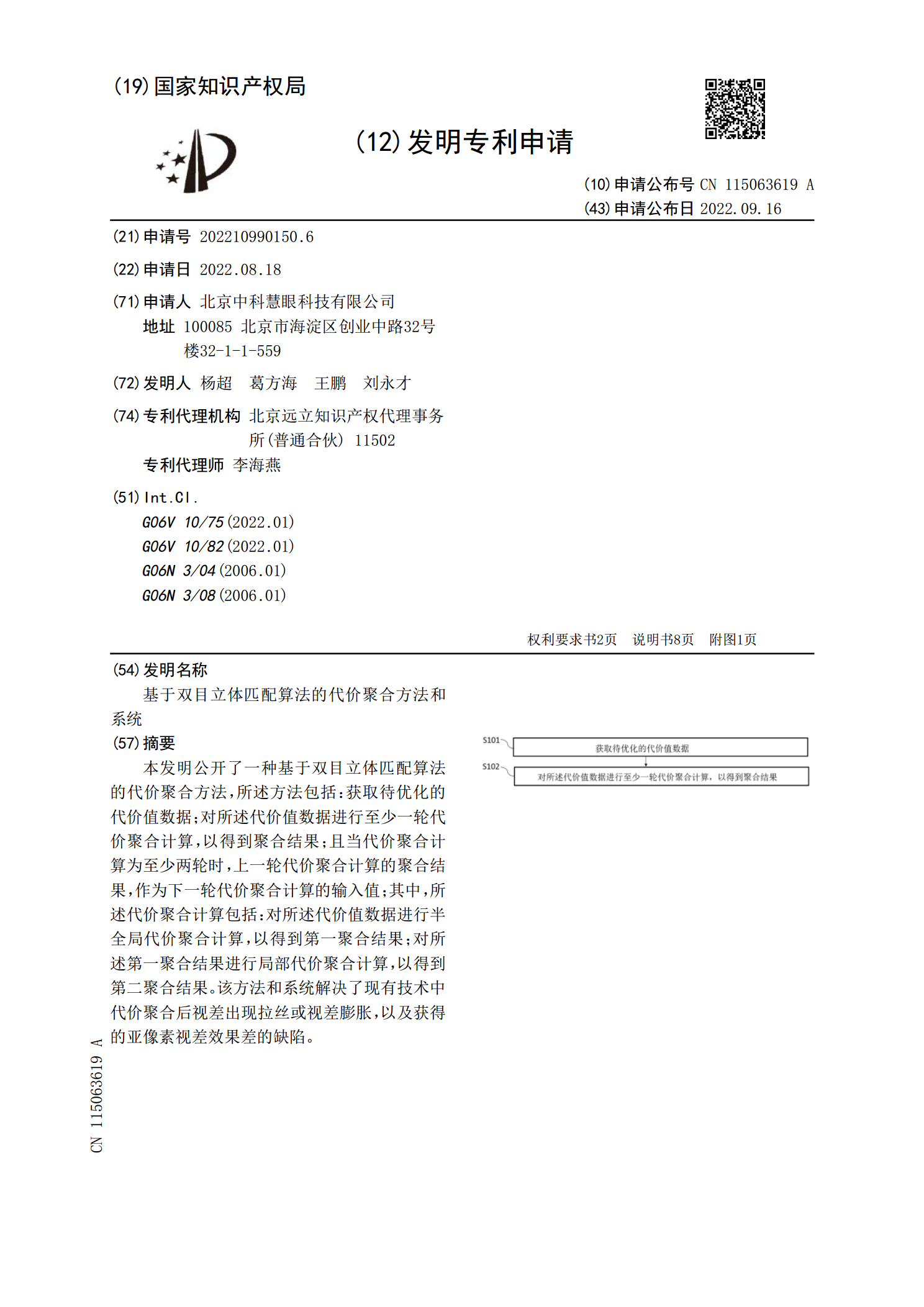
本发明公开了一种基于双目立体匹配算法的代价聚合方法,所述方法包括:获取待优化的代价值数据;对所述代价值数据进行至少一轮代价聚合计算,以得到聚合结果;且当代价聚合计算为至少两轮时,上一轮代价聚合计算的聚合结果,作为下一轮代价聚合计算的输入值;其中,所述代价聚合计算包括:对所述代价值数据进行半全局代价聚合计算,以得到第一聚合结果;对所述第一聚合结果进行局部代价聚合计算,以得到第二聚合结果。该方法和系统解决了现有技术中代价聚合后视差出现拉丝或视差膨胀,以及获得的亚像素视差效果差的缺陷。
基于双目相机的参数立体匹配方法和系统.pdf
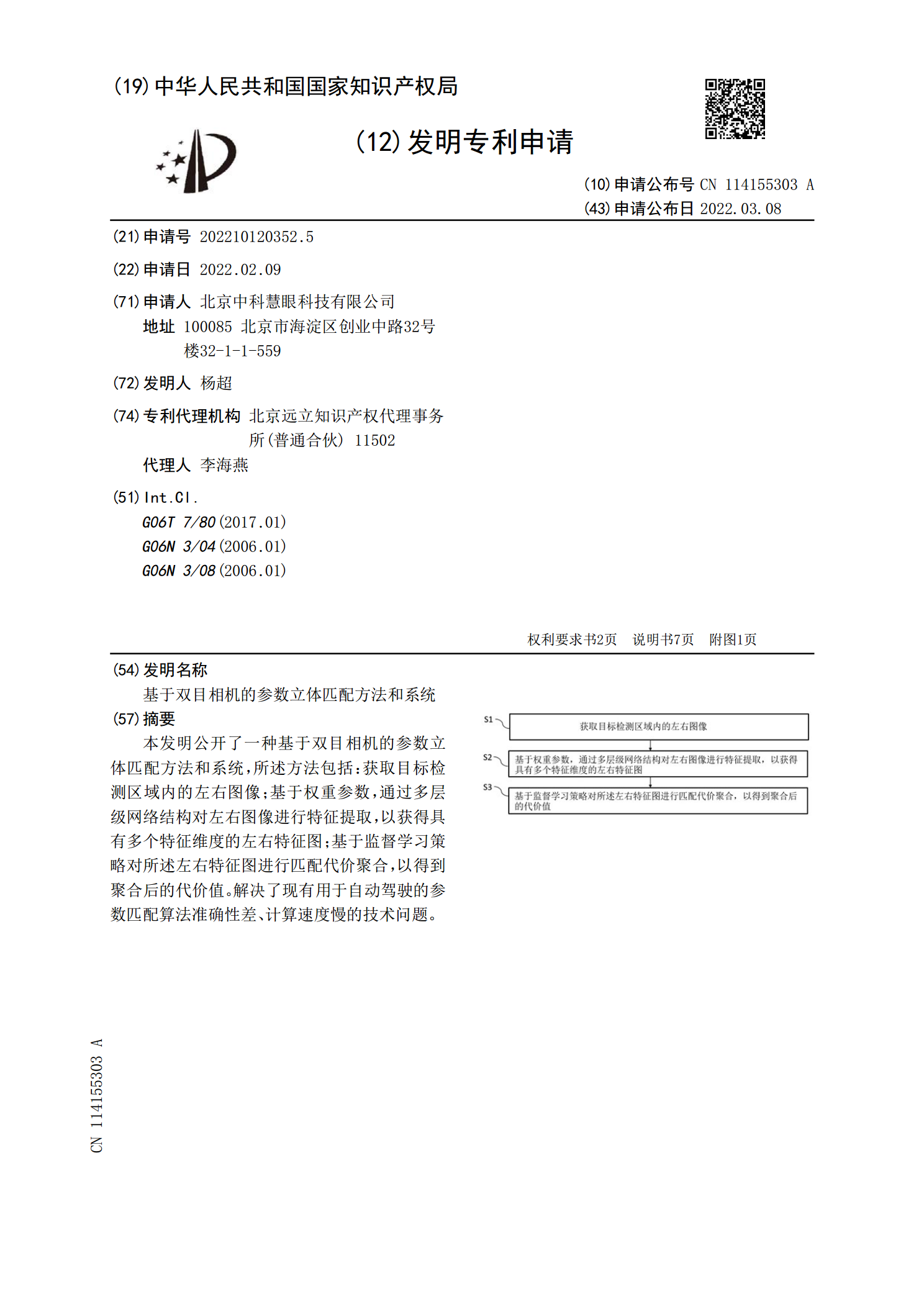
本发明公开了一种基于双目相机的参数立体匹配方法和系统,所述方法包括:获取目标检测区域内的左右图像;基于权重参数,通过多层级网络结构对左右图像进行特征提取,以获得具有多个特征维度的左右特征图;基于监督学习策略对所述左右特征图进行匹配代价聚合,以得到聚合后的代价值。解决了现有用于自动驾驶的参数匹配算法准确性差、计算速度慢的技术问题。
基于深度学习的电梯调控方法及系统.pdf
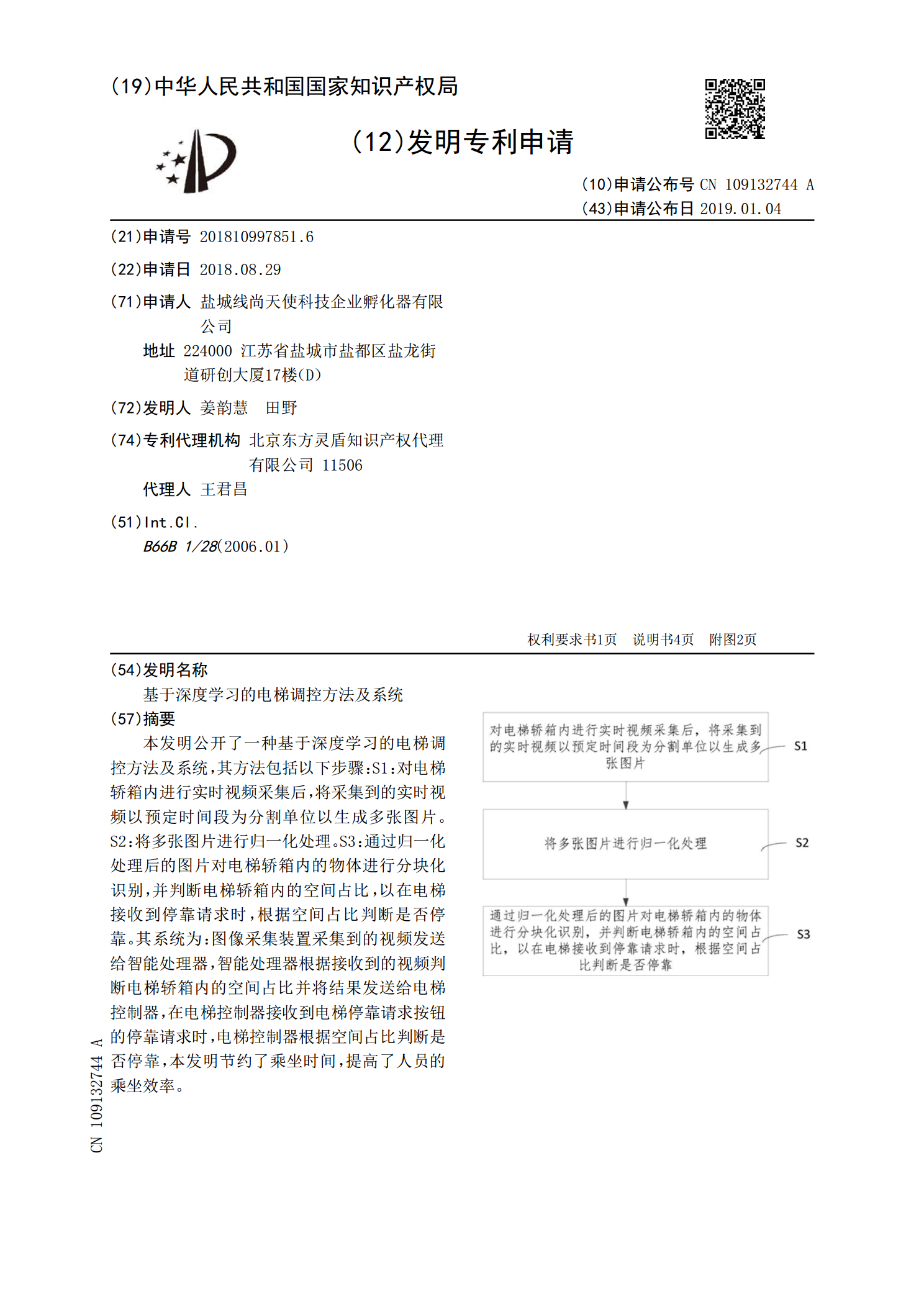
本发明公开了一种基于深度学习的电梯调控方法及系统,其方法包括以下步骤:S1:对电梯轿箱内进行实时视频采集后,将采集到的实时视频以预定时间段为分割单位以生成多张图片。S2:将多张图片进行归一化处理。S3:通过归一化处理后的图片对电梯轿箱内的物体进行分块化识别,并判断电梯轿箱内的空间占比,以在电梯接收到停靠请求时,根据空间占比判断是否停靠。其系统为:图像采集装置采集到的视频发送给智能处理器,智能处理器根据接收到的视频判断电梯轿箱内的空间占比并将结果发送给电梯控制器,在电梯控制器接收到电梯停靠请求按钮的停靠请求
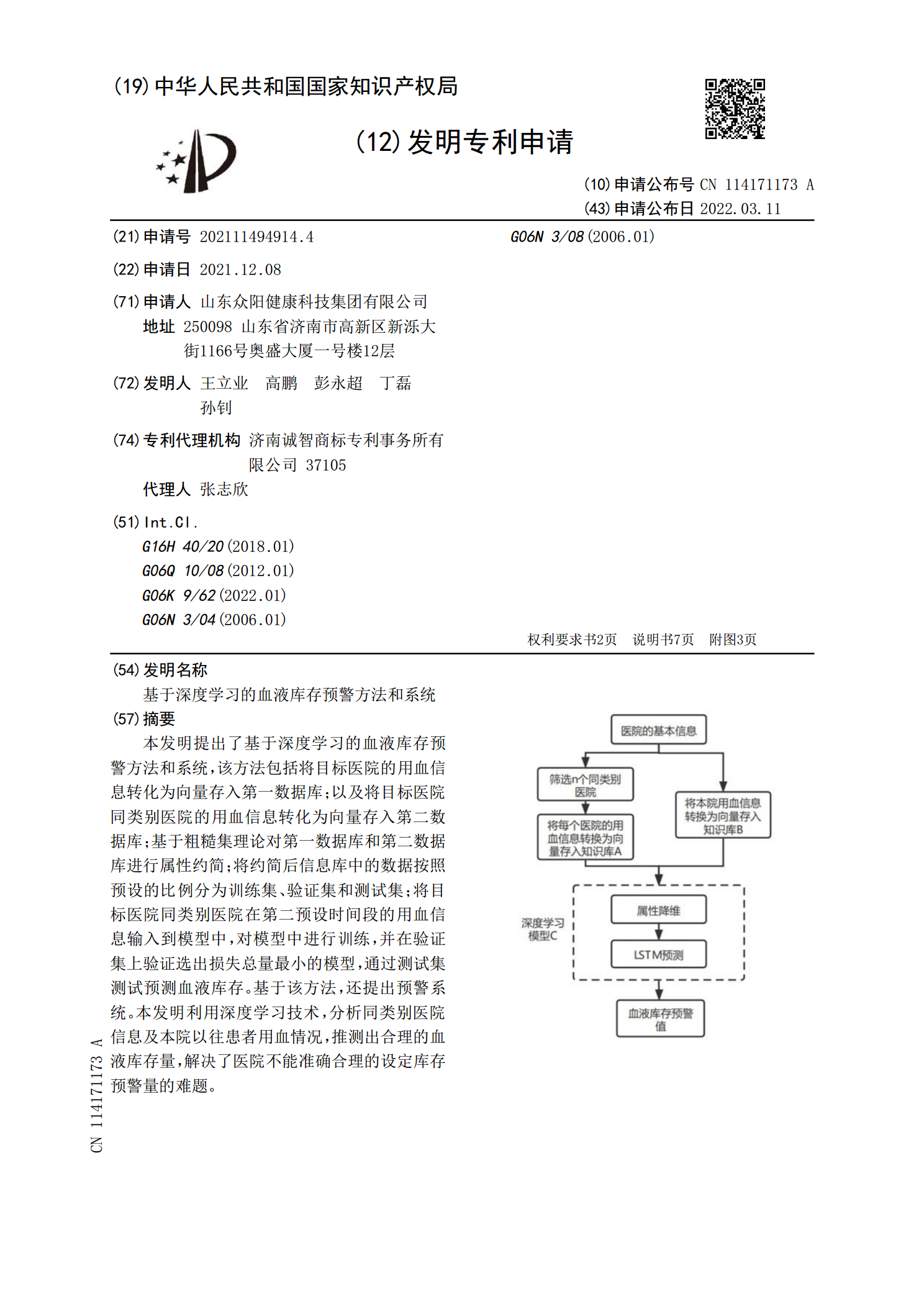
基于深度学习的血液库存预警方法和系统.pdf
本发明提出了基于深度学习的血液库存预警方法和系统,该方法包括将目标医院的用血信息转化为向量存入第一数据库;以及将目标医院同类别医院的用血信息转化为向量存入第二数据库;基于粗糙集理论对第一数据库和第二数据库进行属性约简;将约简后信息库中的数据按照预设的比例分为训练集、验证集和测试集;将目标医院同类别医院在第二预设时间段的用血信息输入到模型中,对模型中进行训练,并在验证集上验证选出损失总量最小的模型,通过测试集测试预测血液库存。基于该方法,还提出预警系统。本发明利用深度学习技术,分析同类别医院信息及本院以往患