
基于双目相机的参数立体匹配方法和系统.pdf

高格****gu

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于双目相机的参数立体匹配方法和系统.pdf
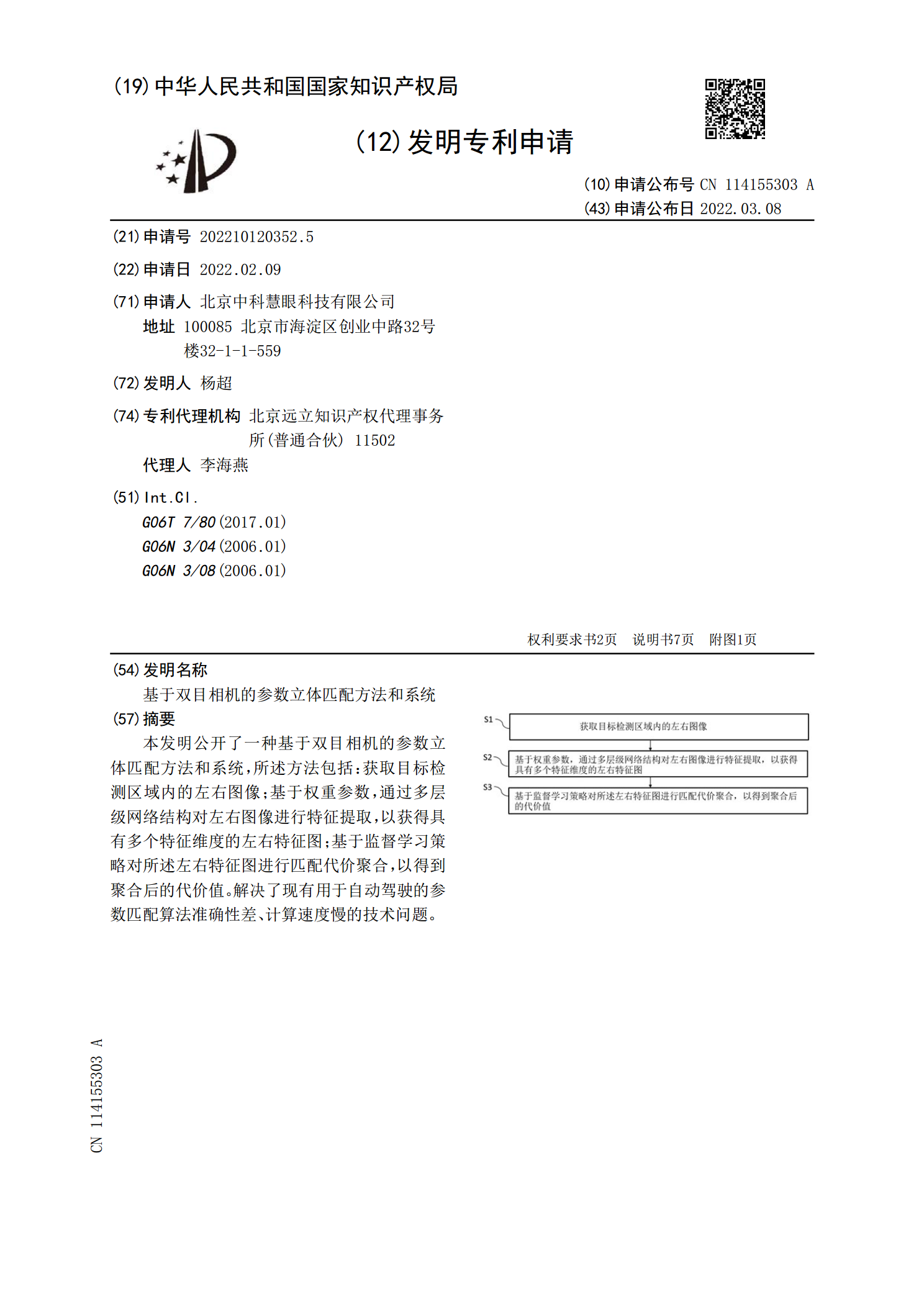
本发明公开了一种基于双目相机的参数立体匹配方法和系统,所述方法包括:获取目标检测区域内的左右图像;基于权重参数,通过多层级网络结构对左右图像进行特征提取,以获得具有多个特征维度的左右特征图;基于监督学习策略对所述左右特征图进行匹配代价聚合,以得到聚合后的代价值。解决了现有用于自动驾驶的参数匹配算法准确性差、计算速度慢的技术问题。
基于双目立体匹配算法的代价聚合方法和系统.pdf
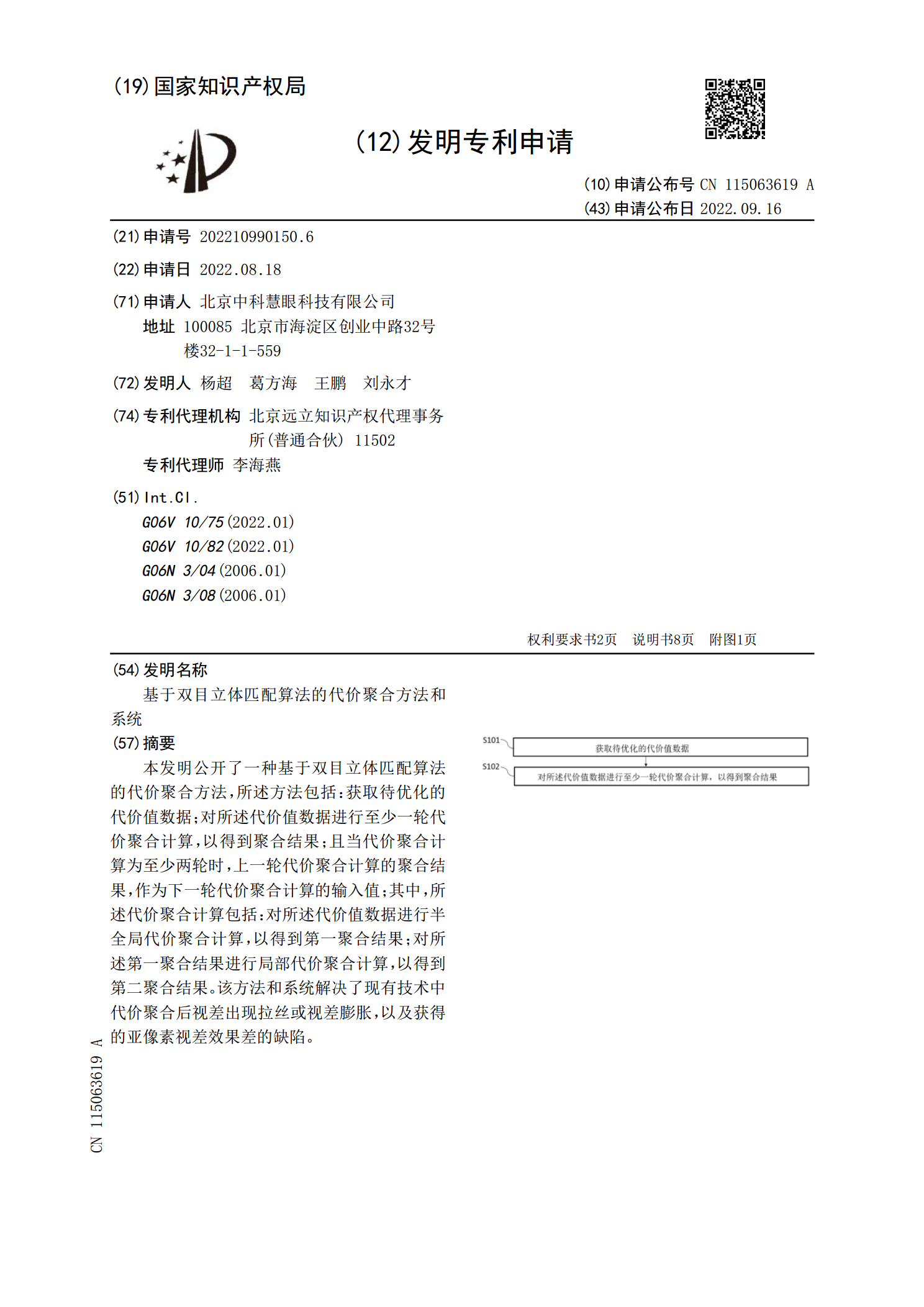
本发明公开了一种基于双目立体匹配算法的代价聚合方法,所述方法包括:获取待优化的代价值数据;对所述代价值数据进行至少一轮代价聚合计算,以得到聚合结果;且当代价聚合计算为至少两轮时,上一轮代价聚合计算的聚合结果,作为下一轮代价聚合计算的输入值;其中,所述代价聚合计算包括:对所述代价值数据进行半全局代价聚合计算,以得到第一聚合结果;对所述第一聚合结果进行局部代价聚合计算,以得到第二聚合结果。该方法和系统解决了现有技术中代价聚合后视差出现拉丝或视差膨胀,以及获得的亚像素视差效果差的缺陷。
双目相机参数调整方法、装置、系统和存储介质.pdf
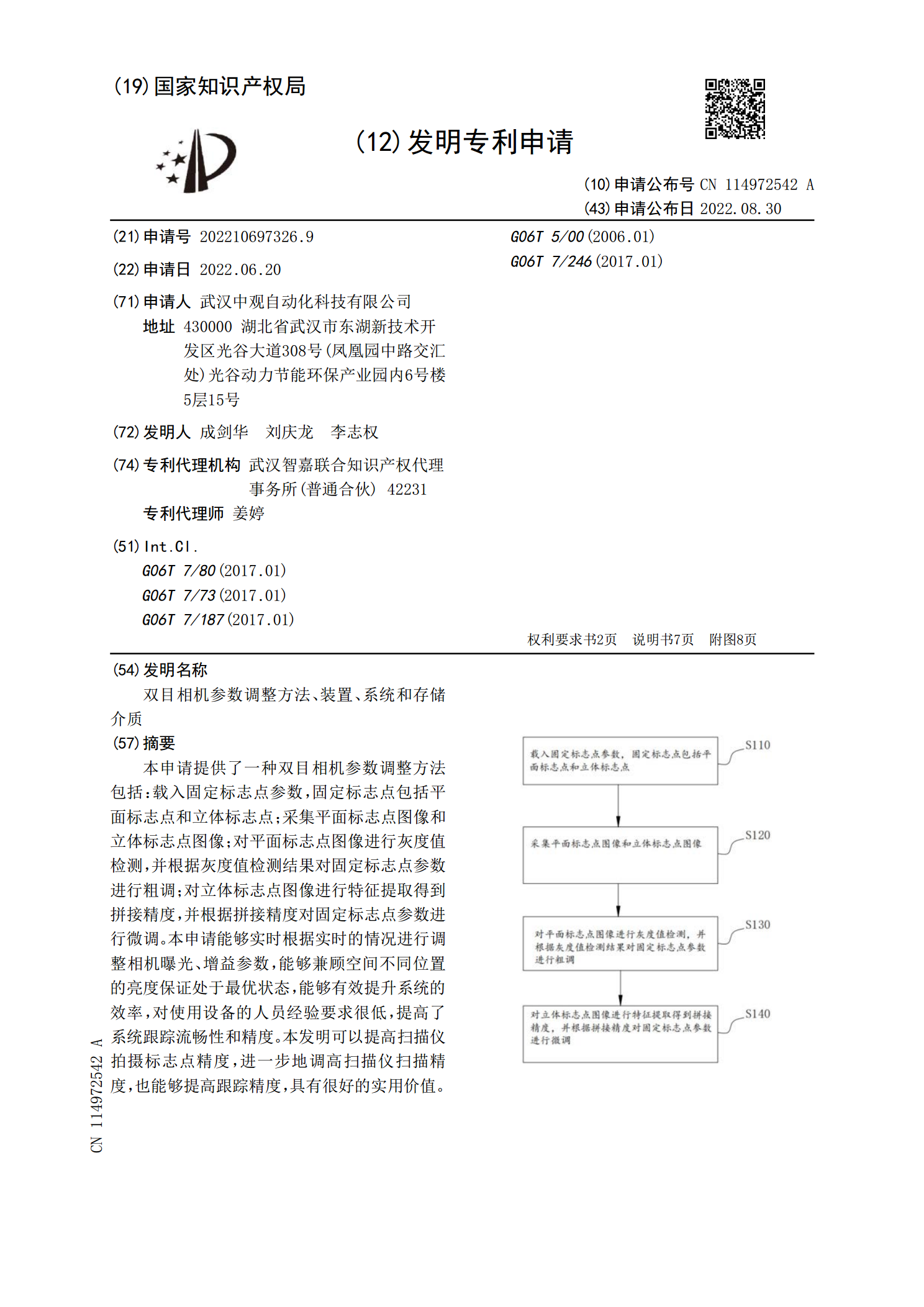
本申请提供了一种双目相机参数调整方法包括:载入固定标志点参数,固定标志点包括平面标志点和立体标志点;采集平面标志点图像和立体标志点图像;对平面标志点图像进行灰度值检测,并根据灰度值检测结果对固定标志点参数进行粗调;对立体标志点图像进行特征提取得到拼接精度,并根据拼接精度对固定标志点参数进行微调。本申请能够实时根据实时的情况进行调整相机曝光、增益参数,能够兼顾空间不同位置的亮度保证处于最优状态,能够有效提升系统的效率,对使用设备的人员经验要求很低,提高了系统跟踪流畅性和精度。本发明可以提高扫描仪拍摄标志点精

基于双目相机的距离测试方法、装置、系统和存储介质.pdf
本发明公开了一种基于双目相机的距离测试方法、装置、系统和存储介质,该方法首先获取双目相机在预设图像范围内的盲区位置,判定待测目标处于盲区位置时,则采用单目对所述待测目标测距,并输出单目测距得到的测距结果;在判定所述待测目标不处于盲区位置时,则采用单目和双目对所述待测目标分别测距,并将获得的单目测距结果与双目测距结果进行权重计算后,得到并输出综合测距结果。该方法融合了双目视差测距原理和单目测距原理的各自优点,利用单双目结合测距,提高了测距精度,从而解决了传统双目相机在障碍物距离检测时受限于盲区而导致的测距精
双目立体相机的对焦参数计算方法、系统和智能终端.pdf
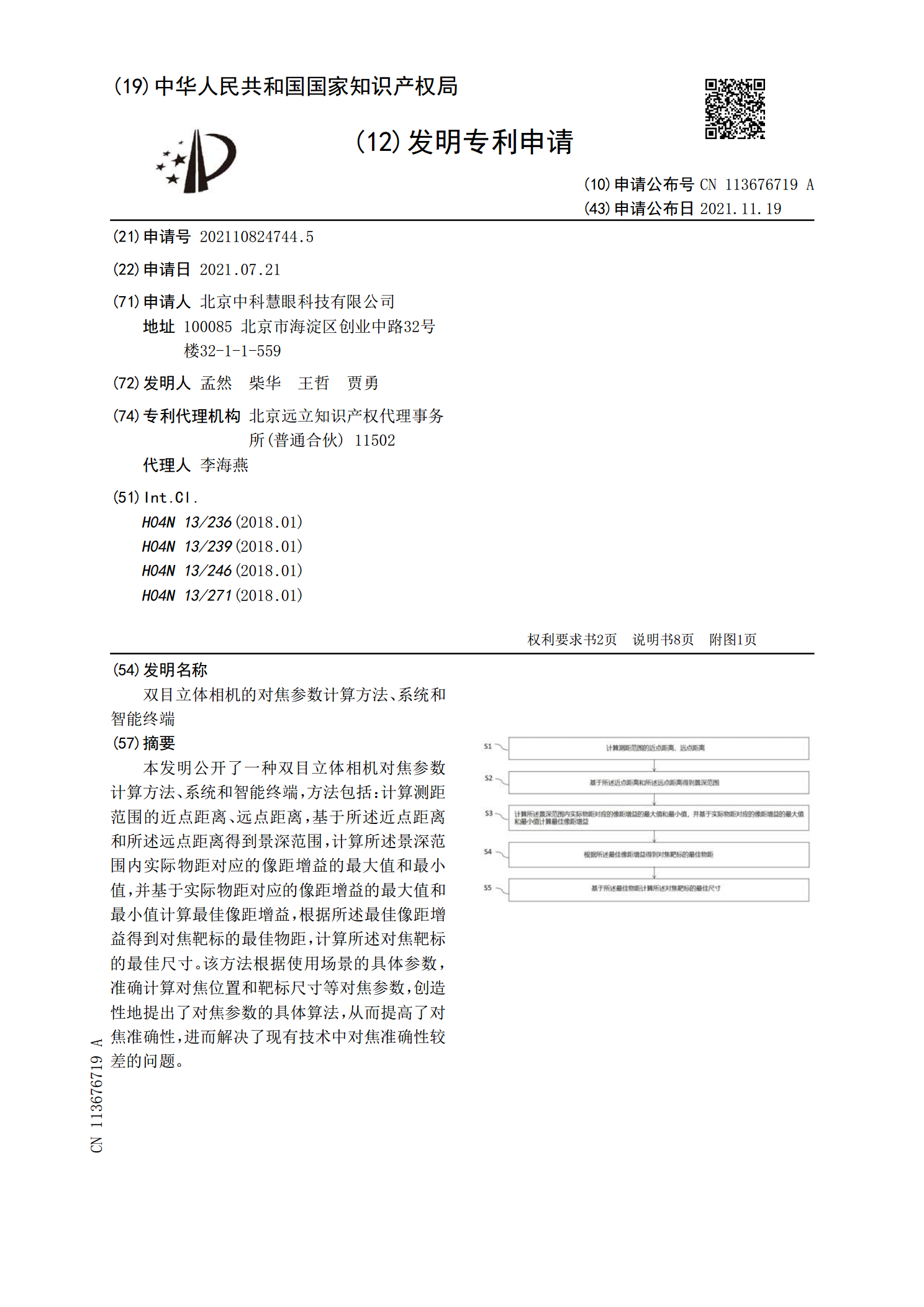
本发明公开了一种双目立体相机对焦参数计算方法、系统和智能终端,方法包括:计算测距范围的近点距离、远点距离,基于所述近点距离和所述远点距离得到景深范围,计算所述景深范围内实际物距对应的像距增益的最大值和最小值,并基于实际物距对应的像距增益的最大值和最小值计算最佳像距增益,根据所述最佳像距增益得到对焦靶标的最佳物距,计算所述对焦靶标的最佳尺寸。该方法根据使用场景的具体参数,准确计算对焦位置和靶标尺寸等对焦参数,创造性地提出了对焦参数的具体算法,从而提高了对焦准确性,进而解决了现有技术中对焦准确性较差的问题。