
机器人调度方法、装置、系统、电子设备和存储介质.pdf

努力****凌芹

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机器人调度方法、装置、系统、电子设备和存储介质.pdf
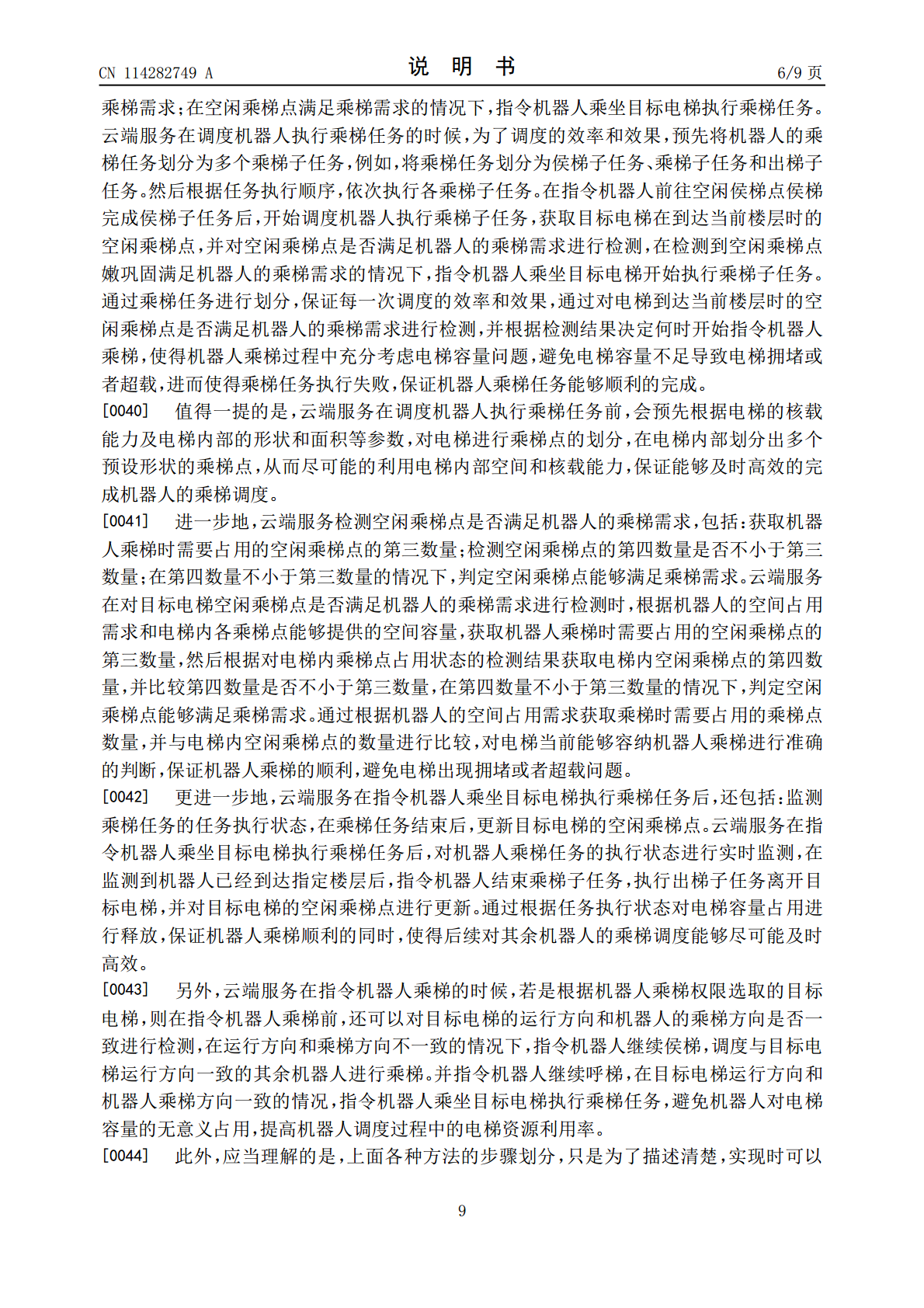
本申请涉及机器人控制技术领域,公开了一种机器人调度方法、装置、系统、电子设备和存储介质,方法包括:根据机器人的乘梯任务,获取机器人的目标电梯;对目标电梯各侯梯点的占用状态进行检测,获取目标电梯的空闲侯梯点;检测空闲侯梯点是否满足机器人的侯梯需求;在空闲侯梯点满足侯梯需求的情况下,指令机器人前往目标电梯的空闲侯梯点侯梯。通过在调度机器人侯梯的过程中充分考虑侯梯点的占用情况,避免机器人在侯梯点不足的情况下前往侯梯点侯梯导致的交通拥堵问题,进而避免由于交通拥堵导致机器人乘梯任务失败,保证机器人侯梯和后续乘梯的安

农机调度方法、装置、系统、电子设备和存储介质.pdf
本申请实施例提供一种农机调度方法、装置、系统、电子设备和存储介质,其中的方法包括:确定从待工作的区域划分出的多个作业区域以及在各个作业区域间进行农机调度的调度路径;获得各作业区域在目标时间点的预计剩余作业量和预计农机数量;根据预计剩余作业量,确定农机调入区域以及多个农机调出备选区域,并根据到农机调入区域的调度路径,从多个农机调出备选区域中确定出农机调出区域,以及调出农机数量;根据调出农机数量,更新各作业区域在目标时间点的预计剩余作业量以及预计农机数量;若剩余作业量的符合预设极差条件,则根据农机调入区域、农
运输调度方法、装置、电子设备和存储介质.pdf
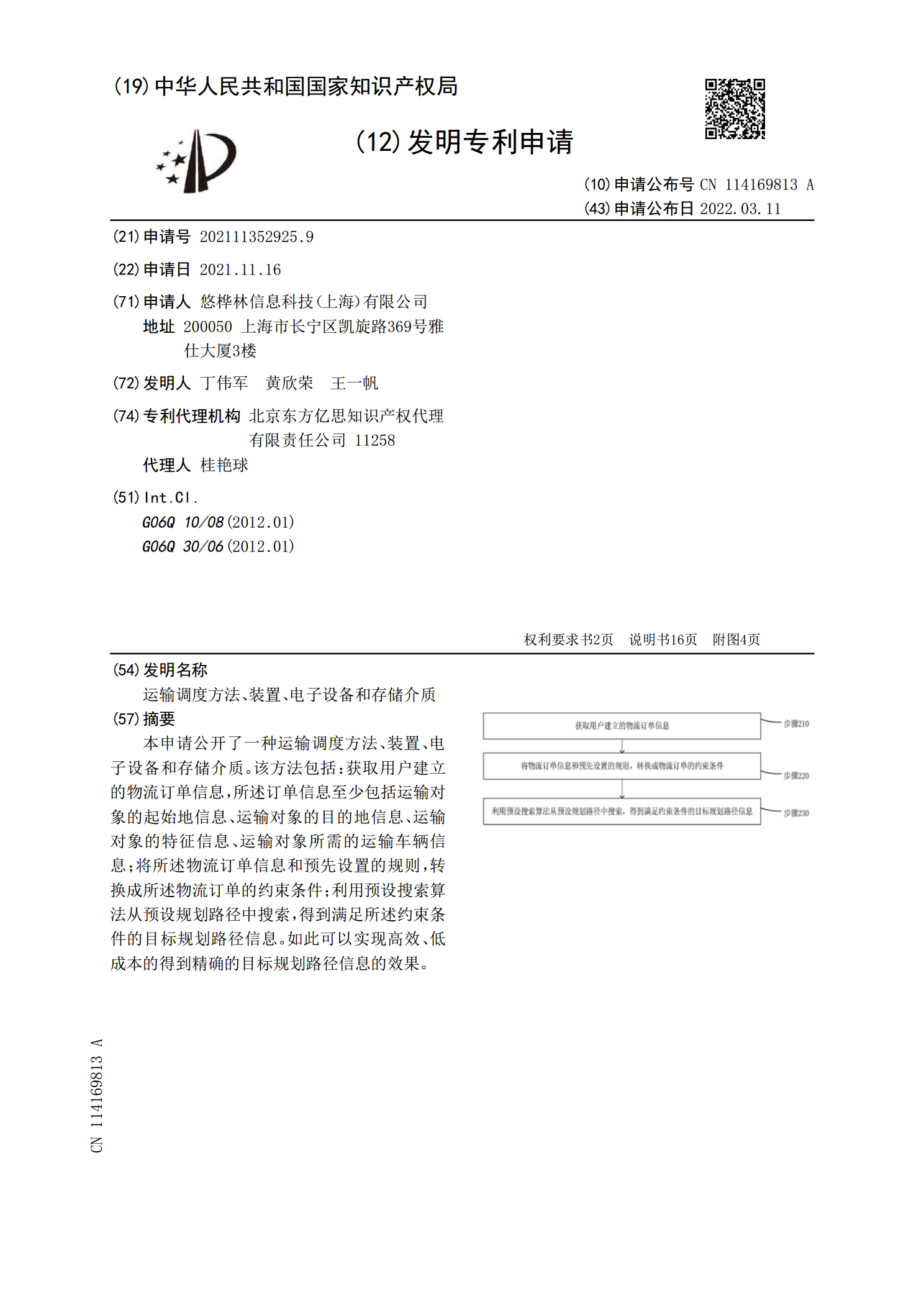
本申请公开了一种运输调度方法、装置、电子设备和存储介质。该方法包括:获取用户建立的物流订单信息,所述订单信息至少包括运输对象的起始地信息、运输对象的目的地信息、运输对象的特征信息、运输对象所需的运输车辆信息;将所述物流订单信息和预先设置的规则,转换成所述物流订单的约束条件;利用预设搜索算法从预设规划路径中搜索,得到满足所述约束条件的目标规划路径信息。如此可以实现高效、低成本的得到精确的目标规划路径信息的效果。

路径调度方法及装置、存储介质和电子设备.pdf
本公开提供了一种路径调度方法及装置、存储介质和电子设备,涉及计算机技术领域。该路径调度方法包括:计算多条路径中每条所述路径的数据传输性能评价值,所述数据传输性能评价值是基于适应度函数而得到的,所述适应度函数是基于所述路径的多维度传输指标而建立的;根据所述多条路径的数据传输性能评价值,确定出数据传输性能评价最优值;将所述数据传输性能评价最优值对应的路径确定为目标路径;将应用层的传输请求映射至所述目标路径上。本公开可以在路径调度过程中,提高目标路径确定的准确性。
项目调度方法、装置、电子设备和存储介质.pdf
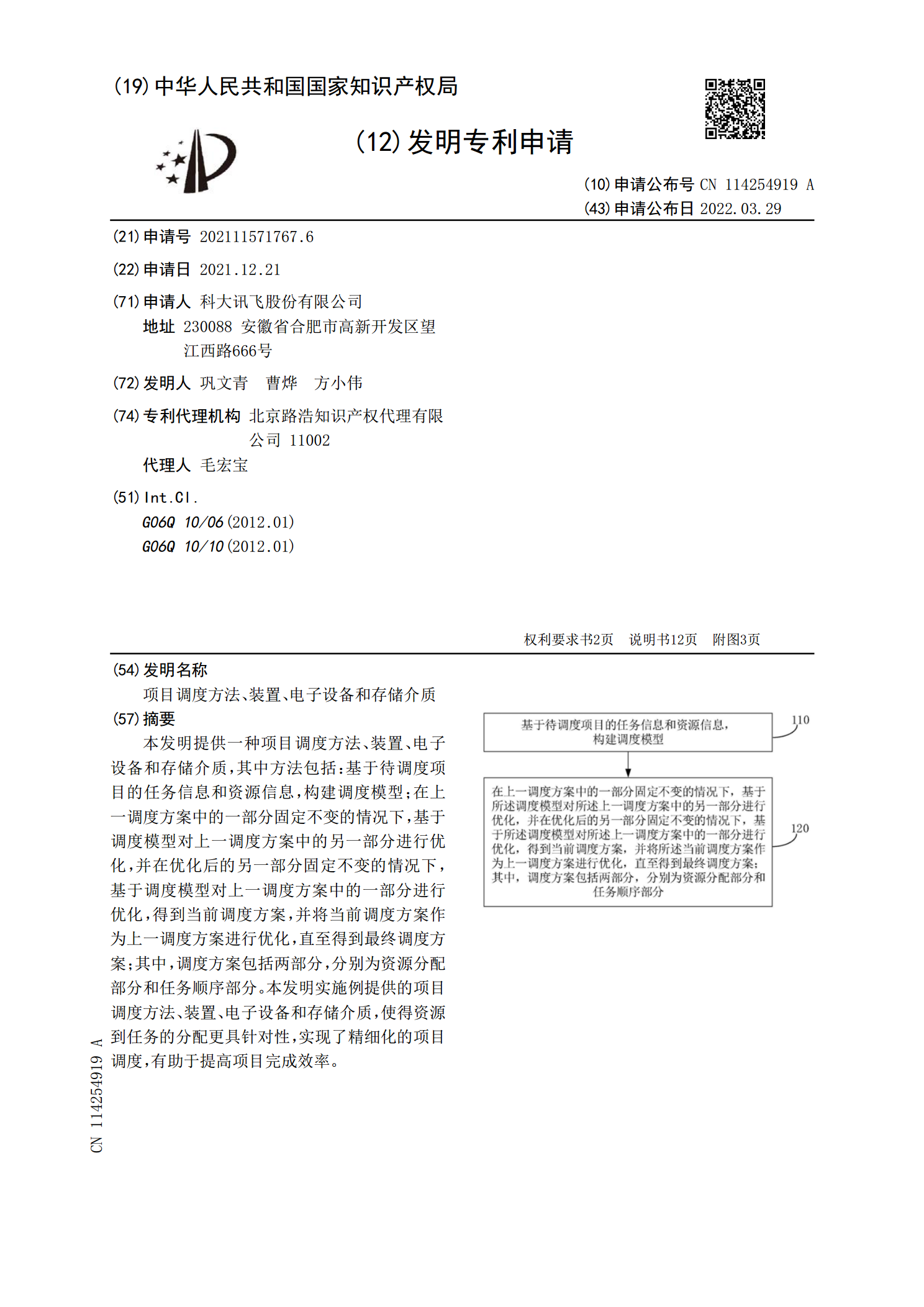
本发明提供一种项目调度方法、装置、电子设备和存储介质,其中方法包括:基于待调度项目的任务信息和资源信息,构建调度模型;在上一调度方案中的一部分固定不变的情况下,基于调度模型对上一调度方案中的另一部分进行优化,并在优化后的另一部分固定不变的情况下,基于调度模型对上一调度方案中的一部分进行优化,得到当前调度方案,并将当前调度方案作为上一调度方案进行优化,直至得到最终调度方案;其中,调度方案包括两部分,分别为资源分配部分和任务顺序部分。本发明实施例提供的项目调度方法、装置、电子设备和存储介质,使得资源到任务的分