
基于结构光的深度相机.pdf

阳炎****找我


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于结构光的深度相机.pdf
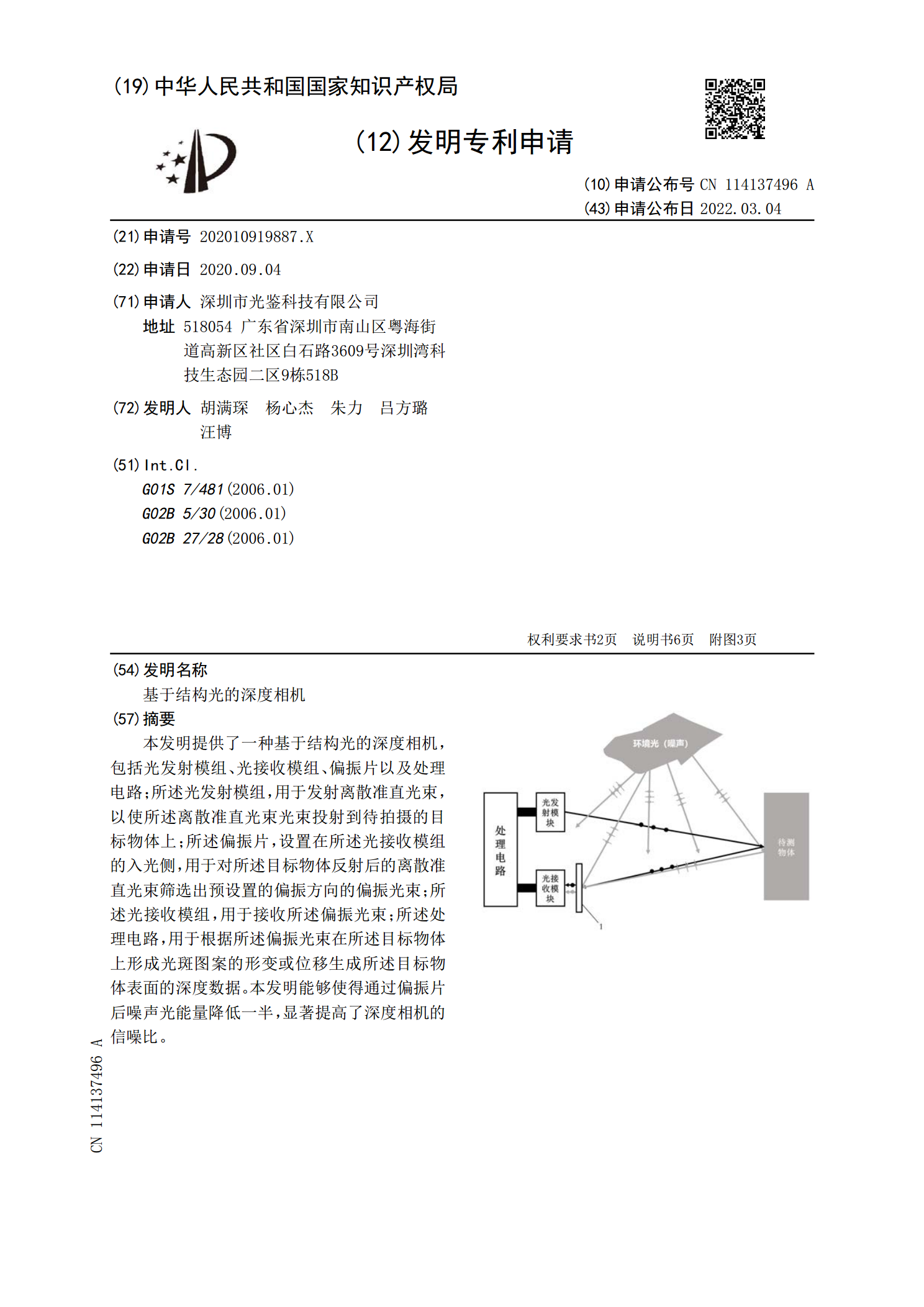
本发明提供了一种基于结构光的深度相机,包括光发射模组、光接收模组、偏振片以及处理电路;所述光发射模组,用于发射离散准直光束,以使所述离散准直光束光束投射到待拍摄的目标物体上;所述偏振片,设置在所述光接收模组的入光侧,用于对所述目标物体反射后的离散准直光束筛选出预设置的偏振方向的偏振光束;所述光接收模组,用于接收所述偏振光束;所述处理电路,用于根据所述偏振光束在所述目标物体上形成光斑图案的形变或位移生成所述目标物体表面的深度数据。本发明能够使得通过偏振片后噪声光能量降低一半,显著提高了深度相机的信噪比。
基于可变焦镜头的结构光相机对焦方法及结构光相机.pdf
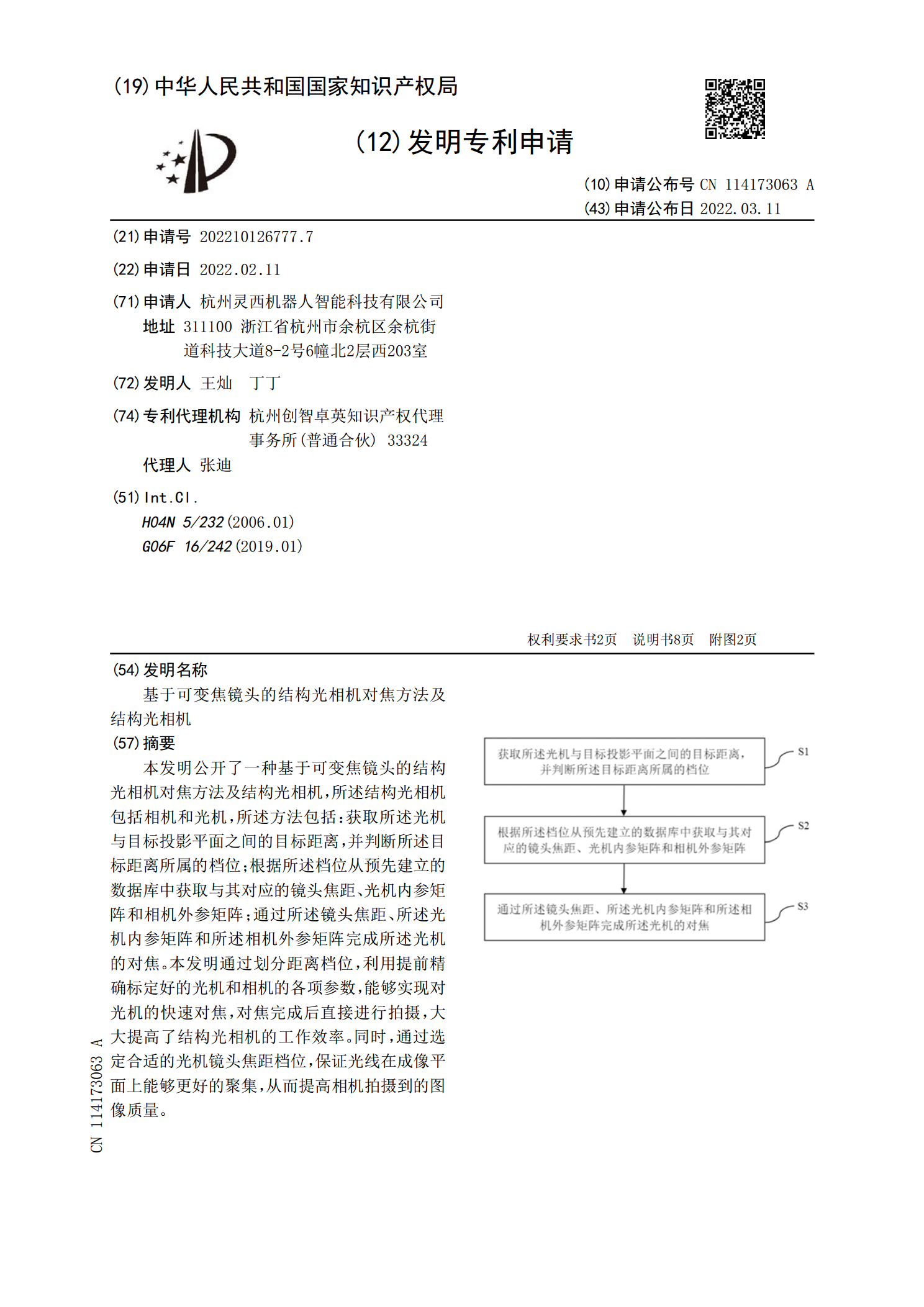
本发明公开了一种基于可变焦镜头的结构光相机对焦方法及结构光相机,所述结构光相机包括相机和光机,所述方法包括:获取所述光机与目标投影平面之间的目标距离,并判断所述目标距离所属的档位;根据所述档位从预先建立的数据库中获取与其对应的镜头焦距、光机内参矩阵和相机外参矩阵;通过所述镜头焦距、所述光机内参矩阵和所述相机外参矩阵完成所述光机的对焦。本发明通过划分距离档位,利用提前精确标定好的光机和相机的各项参数,能够实现对光机的快速对焦,对焦完成后直接进行拍摄,大大提高了结构光相机的工作效率。同时,通过选定合适的光机镜

散斑投射器和结构光深度相机.pdf
本申请实施例涉及机器视觉技术领域,公开了一种散斑投射器和结构光深度相机,该散斑投射器包括:壳体、第一VCSEL、第二VCSEL、准直镜、以及DOE,准直镜相对于第二VCSEL对焦,准直镜相对于第一VCSEL失焦;第一VCSEL发射出的第一光束经准直镜和DOE后,泛光投射至外界;第二VCSEL发射出的第二光束经准直镜和DOE后,点阵投射至外界,散斑投射器用于在收到第一控制信号的情况下开启第一VCSEL并关闭第二VCSEL,还用于在收到第二控制信号的情况下开启第二VCSEL并关闭第一VCSEL,从而在不增加体

一种结构光投射装置以及深度相机.pdf
一种结构光投射装置(1000)及深度相机(10),结构光投射装置(1000)包括:光发射机构(1),用于发射第一光;角度调节机构(2),用于调整第一光的角度;以及衍射机构(3),用于将经过角度调节机构(2)的第一光转换为带有预设图案的第二光。能够提升探测的视场范围的同时,又保证结构光预设图案的空间密度,进而增加深度信息的探测精度。
一种基于3D结构光深度相机的货物图纸自动生成方法.pdf
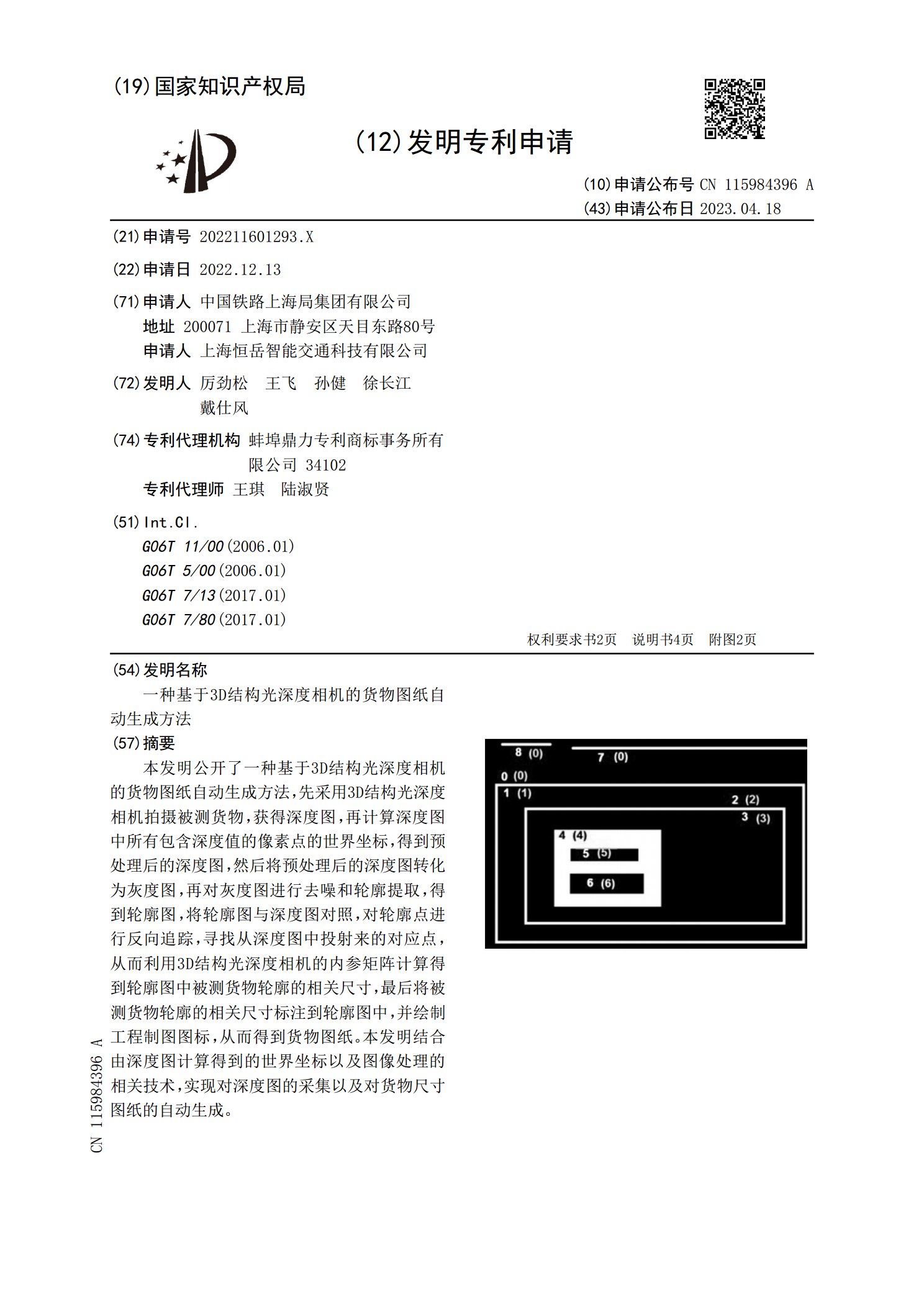
本发明公开了一种基于3D结构光深度相机的货物图纸自动生成方法,先采用3D结构光深度相机拍摄被测货物,获得深度图,再计算深度图中所有包含深度值的像素点的世界坐标,得到预处理后的深度图,然后将预处理后的深度图转化为灰度图,再对灰度图进行去噪和轮廓提取,得到轮廓图,将轮廓图与深度图对照,对轮廓点进行反向追踪,寻找从深度图中投射来的对应点,从而利用3D结构光深度相机的内参矩阵计算得到轮廓图中被测货物轮廓的相关尺寸,最后将被测货物轮廓的相关尺寸标注到轮廓图中,并绘制工程制图图标,从而得到货物图纸。本发明结合由深度图