
一种基于3D结构光深度相机的货物图纸自动生成方法.pdf

猫巷****忠娟


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于3D结构光深度相机的货物图纸自动生成方法.pdf
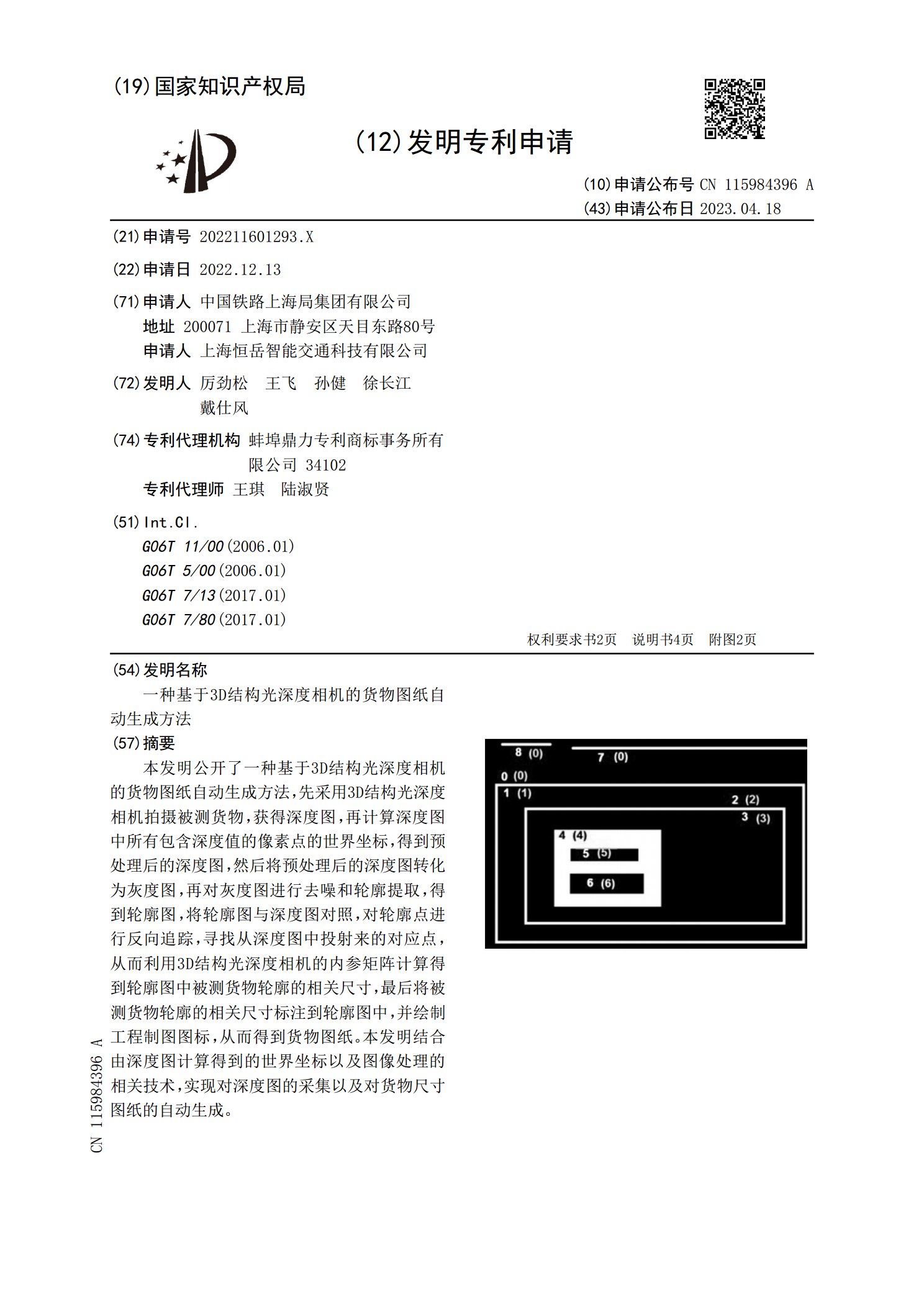
本发明公开了一种基于3D结构光深度相机的货物图纸自动生成方法,先采用3D结构光深度相机拍摄被测货物,获得深度图,再计算深度图中所有包含深度值的像素点的世界坐标,得到预处理后的深度图,然后将预处理后的深度图转化为灰度图,再对灰度图进行去噪和轮廓提取,得到轮廓图,将轮廓图与深度图对照,对轮廓点进行反向追踪,寻找从深度图中投射来的对应点,从而利用3D结构光深度相机的内参矩阵计算得到轮廓图中被测货物轮廓的相关尺寸,最后将被测货物轮廓的相关尺寸标注到轮廓图中,并绘制工程制图图标,从而得到货物图纸。本发明结合由深度图
基于结构光的深度相机.pdf
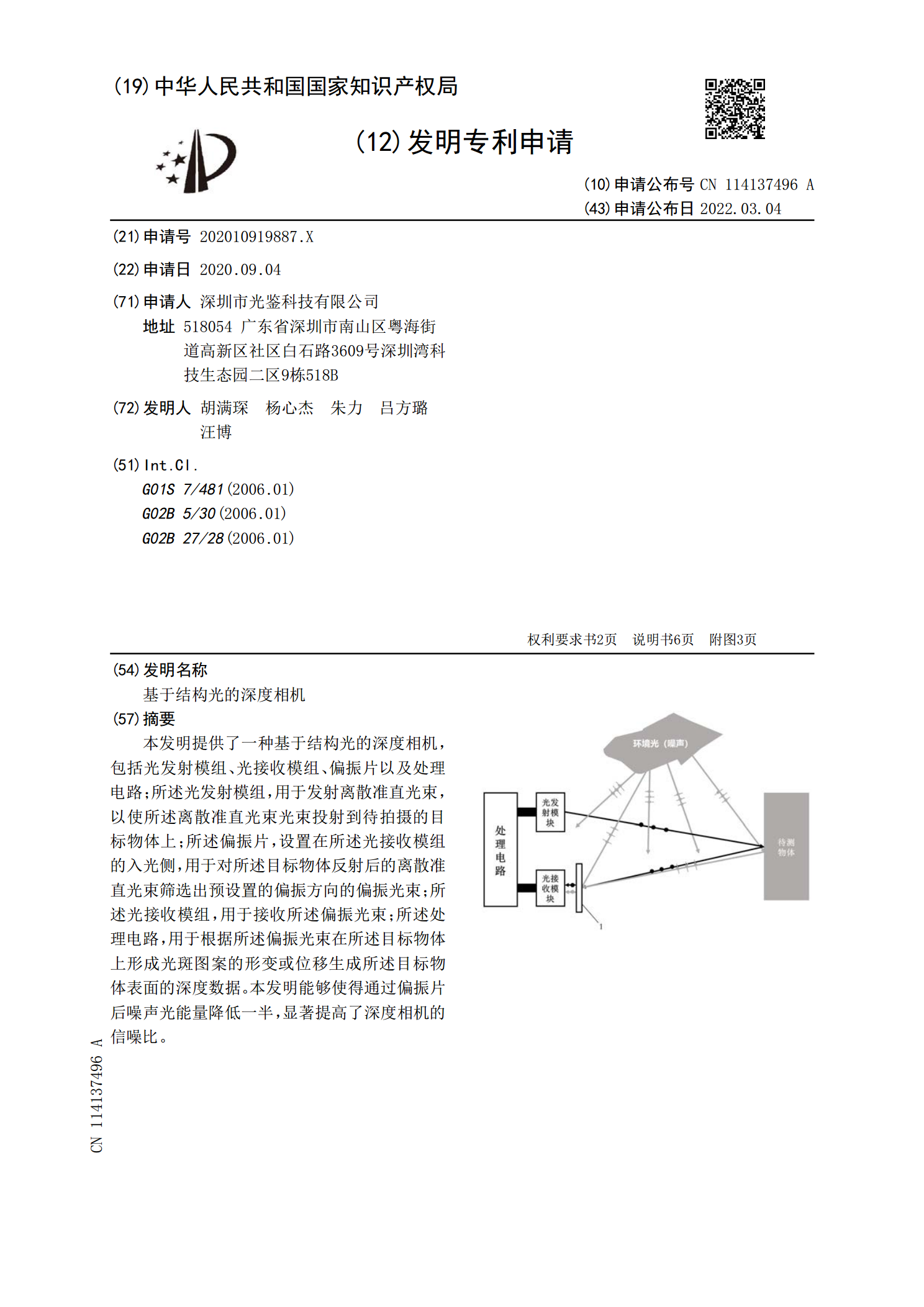
本发明提供了一种基于结构光的深度相机,包括光发射模组、光接收模组、偏振片以及处理电路;所述光发射模组,用于发射离散准直光束,以使所述离散准直光束光束投射到待拍摄的目标物体上;所述偏振片,设置在所述光接收模组的入光侧,用于对所述目标物体反射后的离散准直光束筛选出预设置的偏振方向的偏振光束;所述光接收模组,用于接收所述偏振光束;所述处理电路,用于根据所述偏振光束在所述目标物体上形成光斑图案的形变或位移生成所述目标物体表面的深度数据。本发明能够使得通过偏振片后噪声光能量降低一半,显著提高了深度相机的信噪比。

一种基于3D结构光相机的车身间隙检测方法及系统.pdf
本发明公开了一种基于3D结构光相机的车身间隙检测方法及系统,本发明包括:获取3D结构光相机扫描被测车身间隙得到的点云数据;将被测车身间隙横向的一组点云数据作为一条轮廓,提取每一条轮廓的轮廓间隙点,得到左侧轮廓间隙点集合N<base:Sub>0</base:Sub>和右侧轮廓间隙点集合N<base:Sub>1</base:Sub>;根据左侧轮廓间隙点集合N<base:Sub>0</base:Sub>和右侧轮廓间隙点集合N<base:Sub>1</base:Sub>计算被测车身间隙两侧轮廓之间的均值距离矢量<
基于可变焦镜头的结构光相机对焦方法及结构光相机.pdf
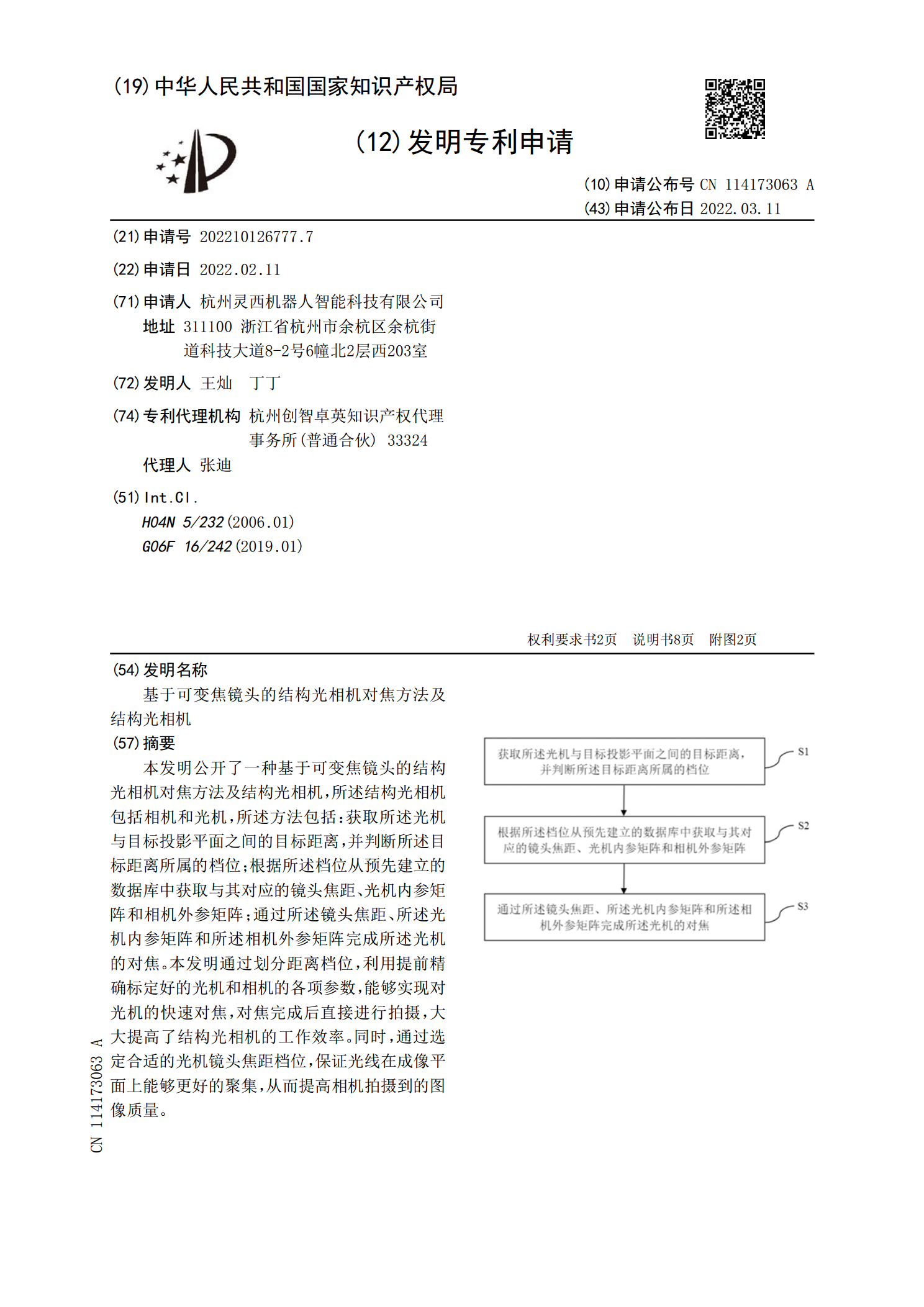
本发明公开了一种基于可变焦镜头的结构光相机对焦方法及结构光相机,所述结构光相机包括相机和光机,所述方法包括:获取所述光机与目标投影平面之间的目标距离,并判断所述目标距离所属的档位;根据所述档位从预先建立的数据库中获取与其对应的镜头焦距、光机内参矩阵和相机外参矩阵;通过所述镜头焦距、所述光机内参矩阵和所述相机外参矩阵完成所述光机的对焦。本发明通过划分距离档位,利用提前精确标定好的光机和相机的各项参数,能够实现对光机的快速对焦,对焦完成后直接进行拍摄,大大提高了结构光相机的工作效率。同时,通过选定合适的光机镜

一种自动生成CAD图纸的方法.pdf
本发明提出一种自动生成CAD图纸的方法,包括步骤一:定义辅助类标识的标准参数,其分类根据点资源、点参照物、线资源、线参照物、面、街道、家集客;步骤二:根据标准参数通过移动设备定位系统的当前位置信息进行标注,并根据标注信息生成位置表格;步骤三:将位置表格传至服务器端,服务器端通过GIS接口GIS界面渲染生成勘察现场信息并最终生成json文件;步骤四:服务器端根据接收到的json文件进行解析为CAD图纸参数;步骤五:根据CAD图纸参数在CAD中根据用户指令生成CAD图。本发明提出一种操作方便,易携带的自动生成