
基于指数衰减曲线前缘变形的仿生机翼参数化变形方法.pdf

论文****轩吖

1/7

2/7
3/7
4/7
5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于指数衰减曲线前缘变形的仿生机翼参数化变形方法.pdf
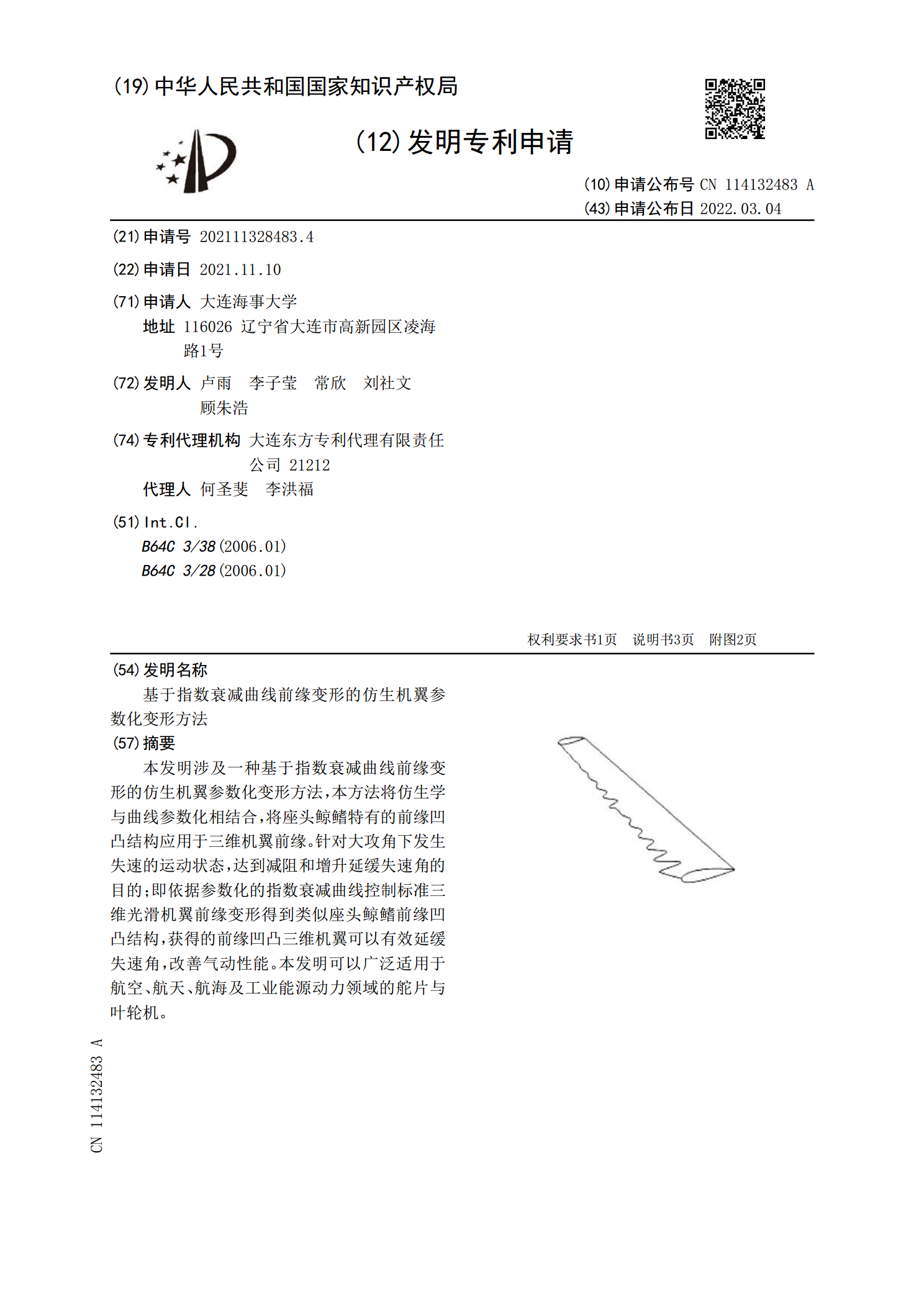
本发明涉及一种基于指数衰减曲线前缘变形的仿生机翼参数化变形方法,本方法将仿生学与曲线参数化相结合,将座头鲸鳍特有的前缘凹凸结构应用于三维机翼前缘。针对大攻角下发生失速的运动状态,达到减阻和增升延缓失速角的目的;即依据参数化的指数衰减曲线控制标准三维光滑机翼前缘变形得到类似座头鲸鳍前缘凹凸结构,获得的前缘凹凸三维机翼可以有效延缓失速角,改善气动性能。本发明可以广泛适用于航空、航天、航海及工业能源动力领域的舵片与叶轮机。
变形机翼前缘.pdf
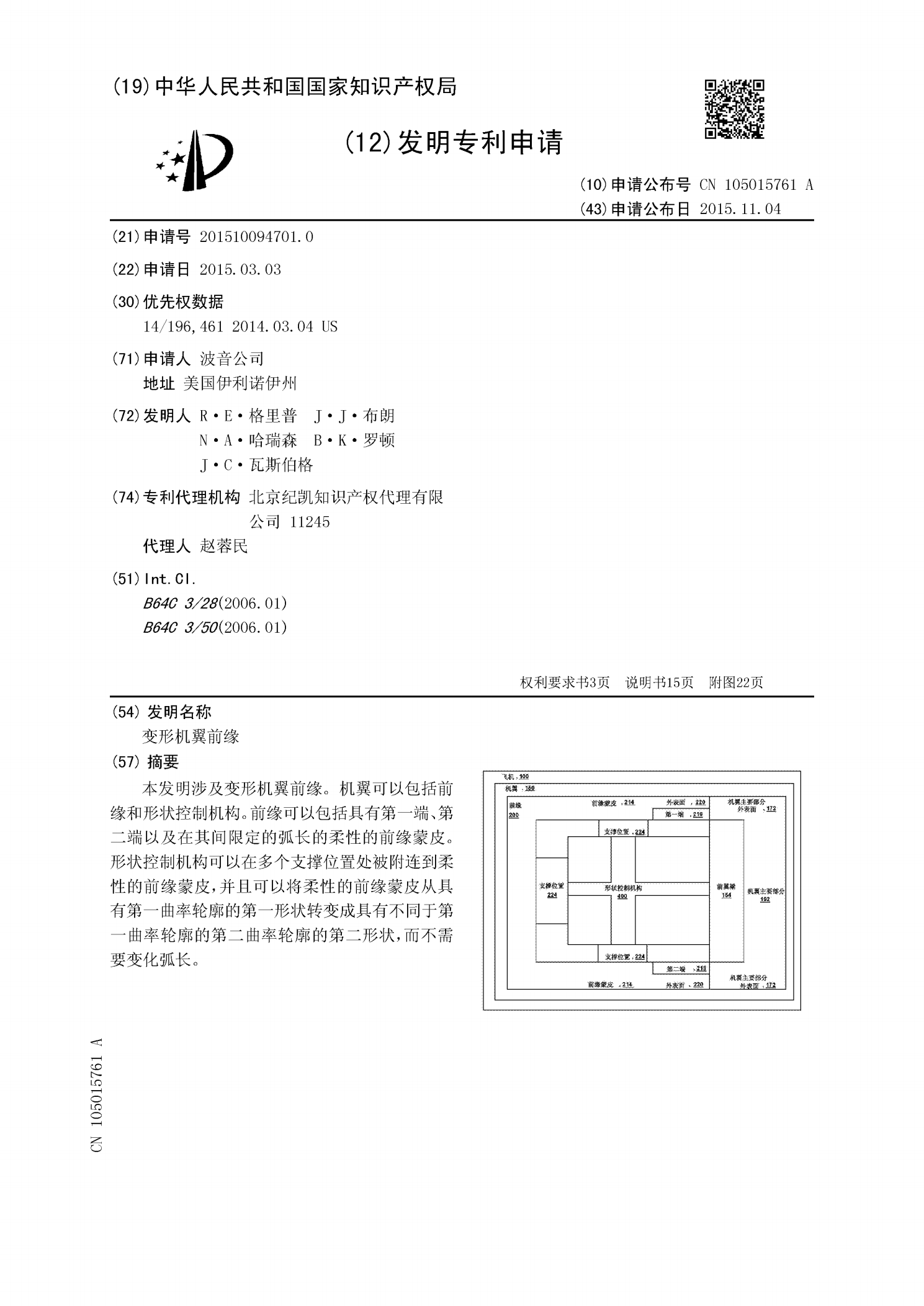
本发明涉及变形机翼前缘。机翼可以包括前缘和形状控制机构。前缘可以包括具有第一端、第二端以及在其间限定的弧长的柔性的前缘蒙皮。形状控制机构可以在多个支撑位置处被附连到柔性的前缘蒙皮,并且可以将柔性的前缘蒙皮从具有第一曲率轮廓的第一形状转变成具有不同于第一曲率轮廓的第二曲率轮廓的第二形状,而不需要变化弧长。
一种基于主动变形蒙皮的多形态变形机翼.pdf
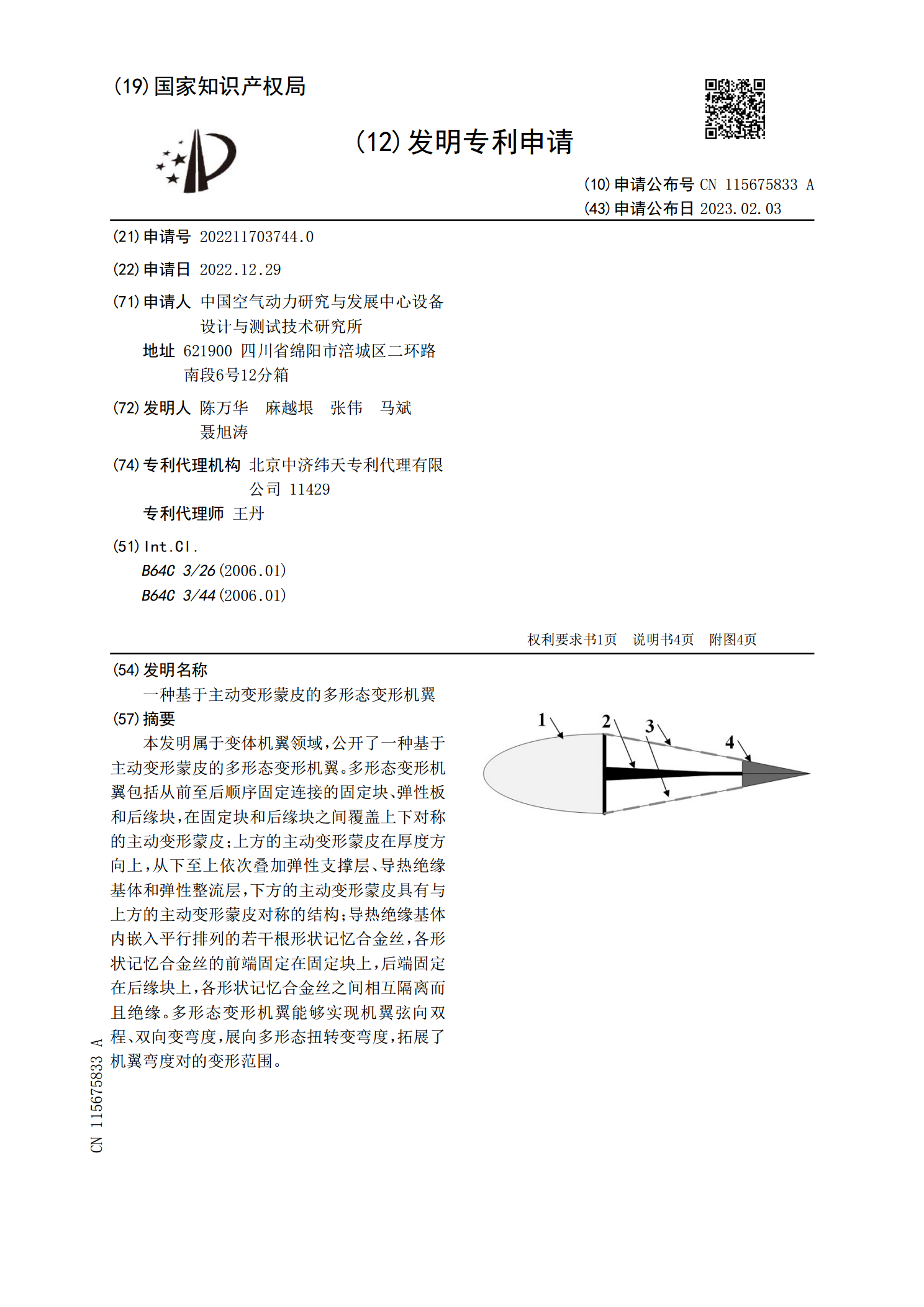
本发明属于变体机翼领域,公开了一种基于主动变形蒙皮的多形态变形机翼。多形态变形机翼包括从前至后顺序固定连接的固定块、弹性板和后缘块,在固定块和后缘块之间覆盖上下对称的主动变形蒙皮;上方的主动变形蒙皮在厚度方向上,从下至上依次叠加弹性支撑层、导热绝缘基体和弹性整流层,下方的主动变形蒙皮具有与上方的主动变形蒙皮对称的结构;导热绝缘基体内嵌入平行排列的若干根形状记忆合金丝,各形状记忆合金丝的前端固定在固定块上,后端固定在后缘块上,各形状记忆合金丝之间相互隔离而且绝缘。多形态变形机翼能够实现机翼弦向双程、双向变弯

可变形机翼前缘 可助飞机在起飞降落时减少噪音及阻力.doc
可变形机翼前缘可助飞机在起飞降落时减少噪音及阻力当靠着窗户坐的乘客当望向窗外的时候,总会注意到安装在机翼前缘的板条以及机翼后缘的副翼。这些前缘板条在低速飞行时可以提供所必须的升力。不过,机翼和板条之间的间隙却会将机翼下方的空气引导至上方,从而引起大量的噪音。近期,一支来自德国航空航天中心的研究团队专门针对这一问题研发出一种可变形机翼前置边缘,从而可以剔除掉机翼和板条间的间隙和减少降落时候产生的噪音及阻力。德国航天中心的研发人员协同空中巴士、欧洲宇航防务集团以及Cassidian空气系统公司研发的前端边缘是

一种新的基于ANSYS的机翼挠曲变形建模方法.docx
一种新的基于ANSYS的机翼挠曲变形建模方法新的基于ANSYS的机翼挠曲变形建模方法摘要:本文提出了一种新的基于ANSYS的机翼挠曲变形建模方法。该方法首先利用ANSYS软件对机翼进行初始几何建模,并对其结构进行网格划分。然后,通过使用贝塞尔曲线和参数化设计方法,将机翼的挠曲变形表示为基函数的线性组合。接下来,通过将机翼的挠曲变形分解为刚体位移和弹性变形两个部分,采用有限元法求解机翼的静力分析问题。最后,通过与实验结果的比较,验证了该方法的准确性和可靠性。1.引言机翼挠曲变形是飞行器的重要设计参数之一,对