
手术机器人路径规划方法、系统、设备及存储介质.pdf

书生****aa


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

手术机器人路径规划方法、系统、设备及存储介质.pdf
本申请涉及一种手术机器人路径规划方法、系统、设备及存储介质,其方法包括:获取待操作对象在目标区域的三维影像模型,并基于预设的目标点和靶点,制定一条或多条操作路径;进行机器人的术中注册;对每条所述操作路径进行演算,以判断机器人是否对所有操作路径可规划,若否,则通过调整待操作对象,直至所有操作路径可规划,并将可规划的所有操作路径发送至机器人的控制器。本申请能够有效提高患者手术效率,降低手术风险。

机器人路径规划方法、系统、电子设备及存储介质.pdf
本申请实施例提供了一种机器人路径规划方法、系统、电子设备及存储介质,属于机器人路径规划技术领域。该方法包括:通过环境感知模块获取目标机器人的位姿信息为第一位姿数据,并获取目标障碍物的位姿信息为第二位姿数据;同时获取目标机器人的主体结构数据;根据第一位姿数据和主体结构数据构建机器人分布数据,并根据第二位姿数据构建障碍分布数据;根据机器人分布数据和障碍分布数据构建避障约束数据;根据避障约束数据和预设约束数据对目标机器人进行路径规划,得到路径规划数据。本申请实施例能够在构建分布数据时考虑了机器人和障碍物的形状;

清洁机器人路径规划方法及系统、存储介质、电子设备.pdf
本发明提供清洁机器人路径规划方法,包括清洁区域获取,导入包含待清洁区域的轮廓数据,并将轮廓数据发送至地图生成模块;地图生成,地图生成模块根据轮廓数据生成待清洁区域的场景地图;路径规划,路径规划模块根据场景地图规划清洁机器人清洁路径。本发明还涉及清洁机器人路径规划系统、存储介质、电子设备。本发明采用数据导入的方式,通过实景的户型图或图片来提高机器人地图构建速度与准确性,从而实现提高机器人快速规划路径的能力与智能化。本发明逻辑清晰,构思巧妙,便于智能清洁机器人推广应用。

机器人局部路径规划方法、系统和可读存储介质.pdf
本发明涉及机器人局部路径规划方法、系统和可读存储介质,其中机器人局部路径规划方法包括:获取机器人从初始位置到达目标位置的全局路径,全局路径为全局路径点的集合;对全局路径点进行采样,以得到一组全局采样点;将所述每个全局采样点在与全局路径垂直的方向上平移至少两次,每平移一次,则获取一组局部采样点,其中平移的距离在预设的平移距离阈值范围内;对所述每组局部采样点分别进行曲线拟合,以得到多条初始局部路径;获取障碍物信息,并根据障碍物信息对每一条初始局部路径进行评价,以筛选并输出局部路径。通过本发明的技术方案规划的局
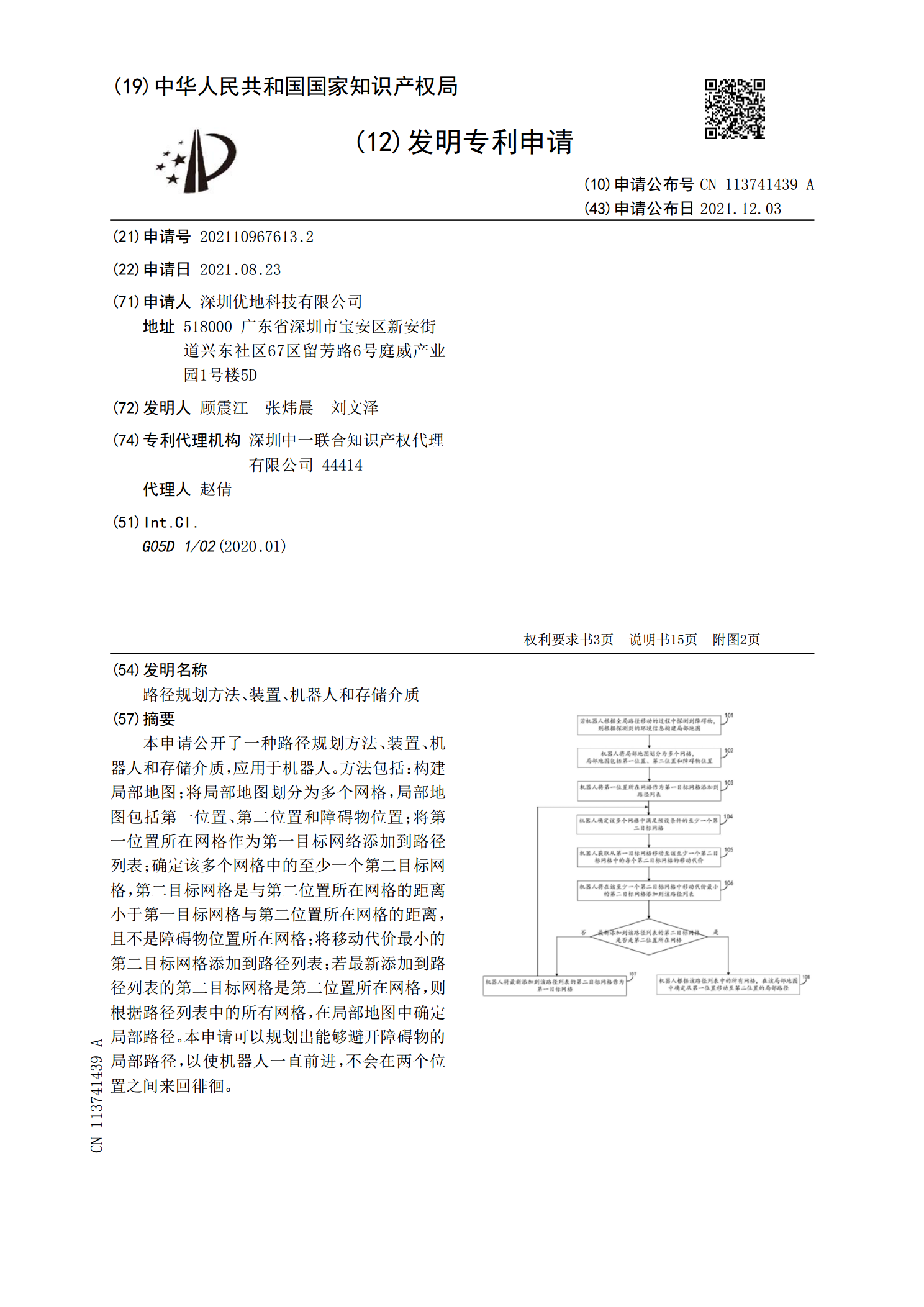
路径规划方法、装置、机器人和存储介质.pdf
本申请公开了一种路径规划方法、装置、机器人和存储介质,应用于机器人。方法包括:构建局部地图;将局部地图划分为多个网格,局部地图包括第一位置、第二位置和障碍物位置;将第一位置所在网格作为第一目标网络添加到路径列表;确定该多个网格中的至少一个第二目标网格,第二目标网格是与第二位置所在网格的距离小于第一目标网格与第二位置所在网格的距离,且不是障碍物位置所在网格;将移动代价最小的第二目标网格添加到路径列表;若最新添加到路径列表的第二目标网格是第二位置所在网格,则根据路径列表中的所有网格,在局部地图中确定局部路径。