
一种基于相机特征分离的目标重识别方法.pdf

兴朝****45

1/10
2/10
3/10
4/10
5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于相机特征分离的目标重识别方法.pdf
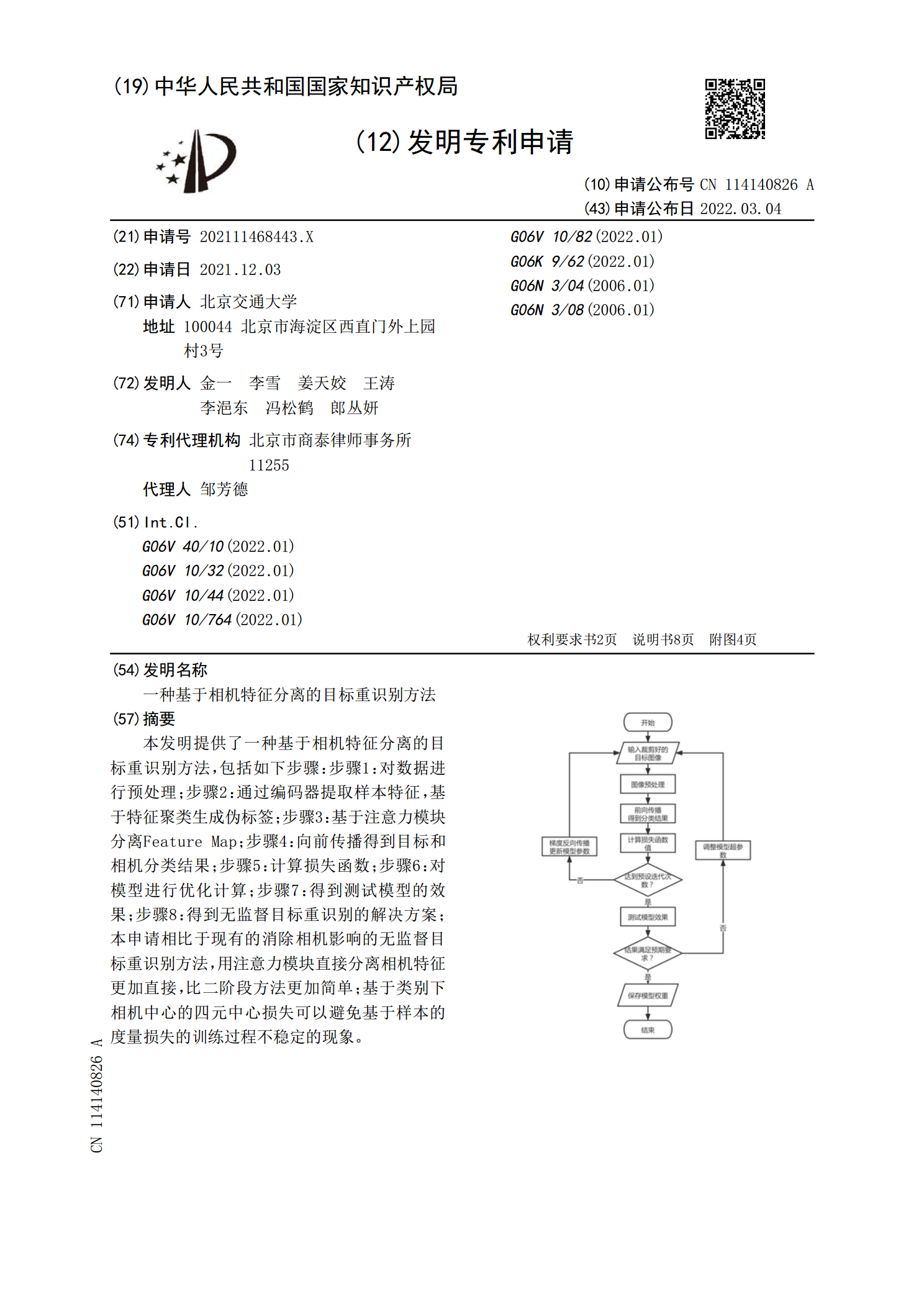
本发明提供了一种基于相机特征分离的目标重识别方法,包括如下步骤:步骤1:对数据进行预处理;步骤2:通过编码器提取样本特征,基于特征聚类生成伪标签;步骤3:基于注意力模块分离FeatureMap;步骤4:向前传播得到目标和相机分类结果;步骤5:计算损失函数;步骤6:对模型进行优化计算;步骤7:得到测试模型的效果;步骤8:得到无监督目标重识别的解决方案;本申请相比于现有的消除相机影响的无监督目标重识别方法,用注意力模块直接分离相机特征更加直接,比二阶段方法更加简单;基于类别下相机中心的四元中心损失可以避免基

一种基于轮廓特征的目标识别方法.pdf
本发明公开了一种基于轮廓特征的目标识别方法,包括如下步骤一和步骤二:步骤一、建立物体模板轮廓的特征库:提取物体模板的完整轮廓;在轮廓上提取特征点和中心点;利用特征点和中心点建立距离矩阵对轮廓进行描述;针对轮廓上的所有像素点进行距离矩阵的计算;步骤二、对待检测图像进行目标识别:提取待检测图像的边缘;在边缘上提取特征点;计算特征点组成的特征描述;将待检测图像的特征描述与物体模板轮廓特征库中的特征进行匹配;估计待检测图像轮廓的中心点;估计待检测图像的轮廓。本发明相对于现有技术,解决了在轮廓匹配过程中的尺度问题,
一种基于轮廓特征的目标识别方法.pdf
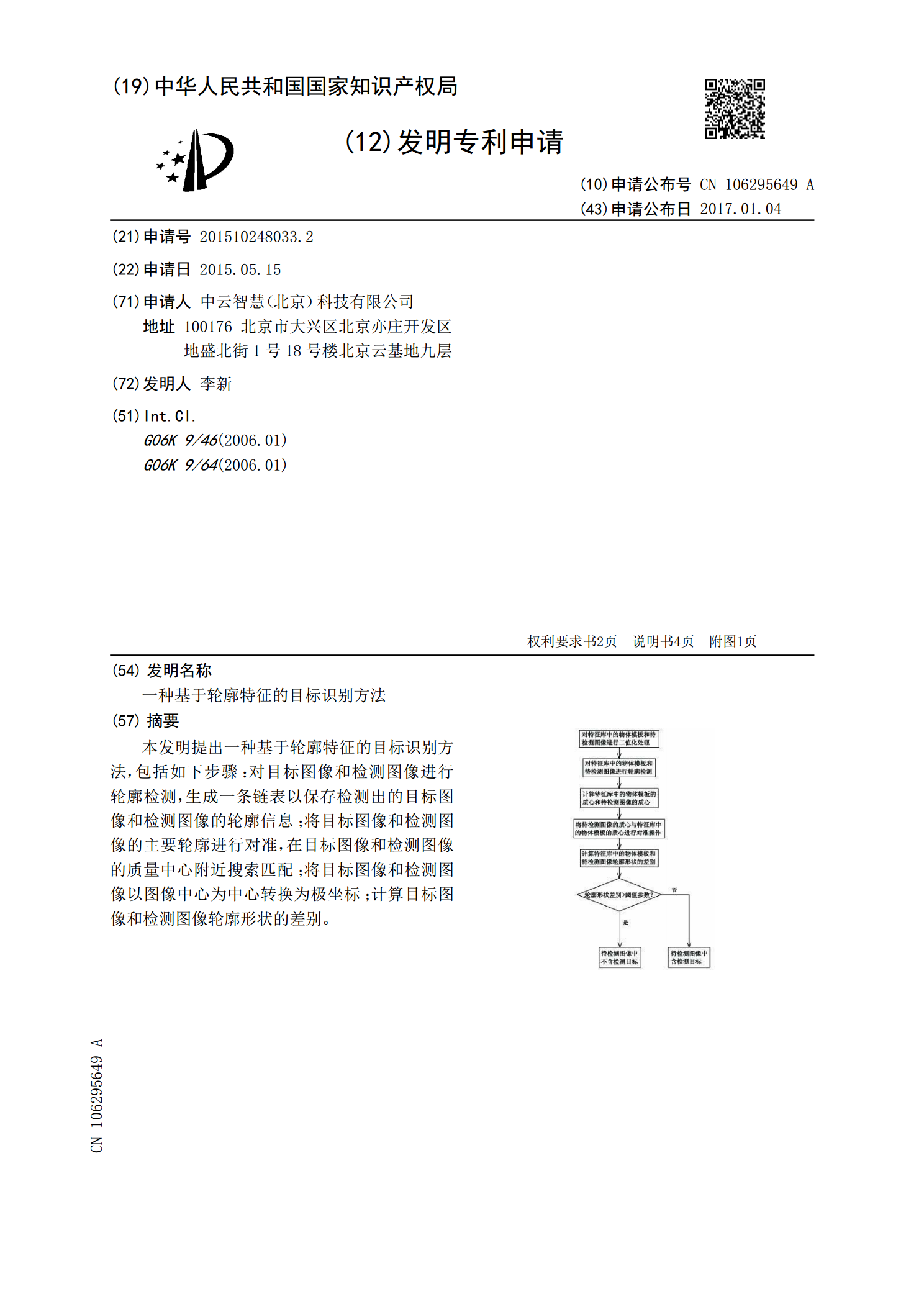
本发明提出一种基于轮廓特征的目标识别方法,包括如下步骤:对目标图像和检测图像进行轮廓检测,生成一条链表以保存检测出的目标图像和检测图像的轮廓信息;将目标图像和检测图像的主要轮廓进行对准,在目标图像和检测图像的质量中心附近搜索匹配;将目标图像和检测图像以图像中心为中心转换为极坐标;计算目标图像和检测图像轮廓形状的差别。
一种基于事件相机的海上船舶目标识别方法.pdf
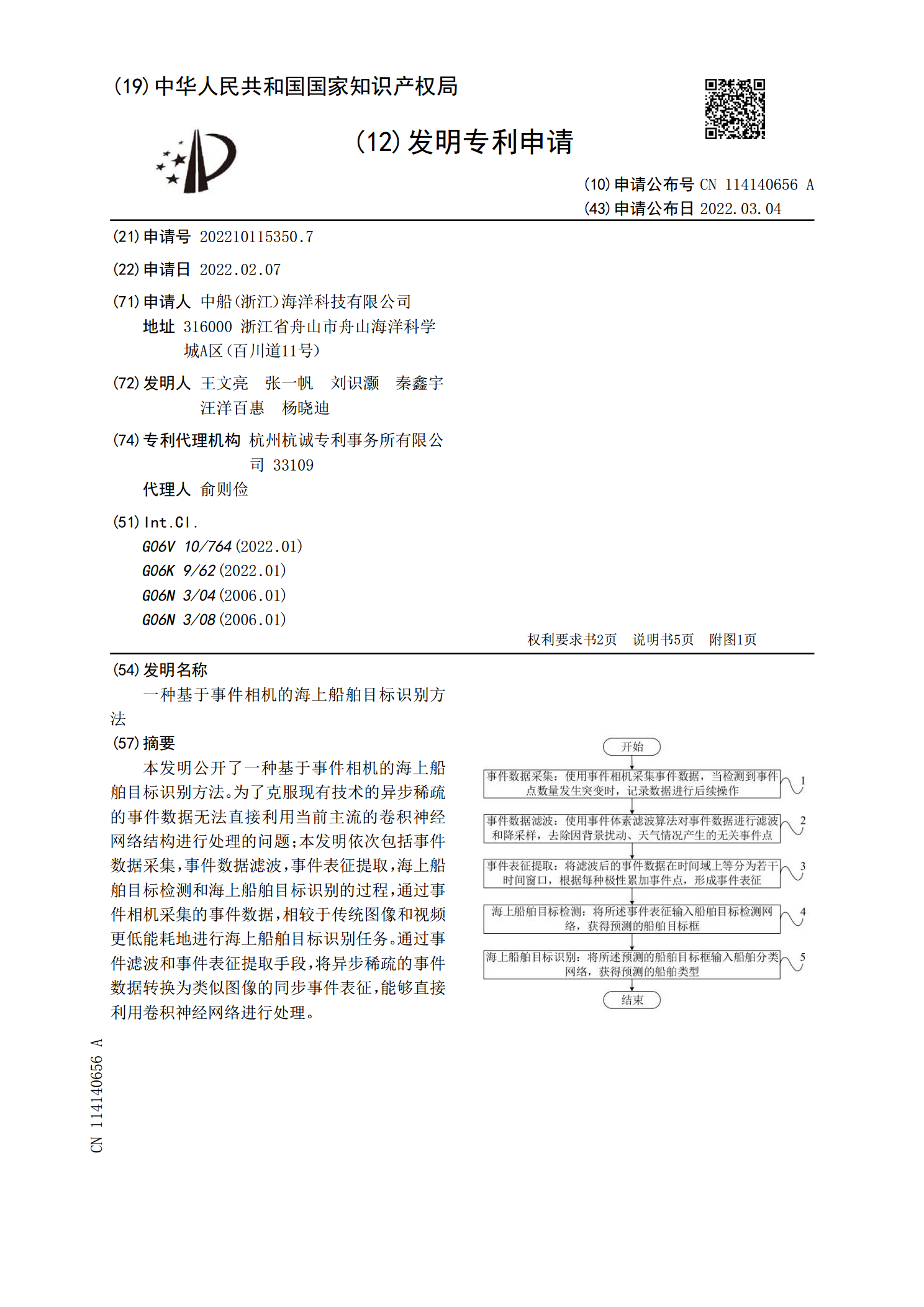
本发明公开了一种基于事件相机的海上船舶目标识别方法。为了克服现有技术的异步稀疏的事件数据无法直接利用当前主流的卷积神经网络结构进行处理的问题;本发明依次包括事件数据采集,事件数据滤波,事件表征提取,海上船舶目标检测和海上船舶目标识别的过程,通过事件相机采集的事件数据,相较于传统图像和视频更低能耗地进行海上船舶目标识别任务。通过事件滤波和事件表征提取手段,将异步稀疏的事件数据转换为类似图像的同步事件表征,能够直接利用卷积神经网络进行处理。
一种基于图像轮廓特征的目标识别方法.pdf
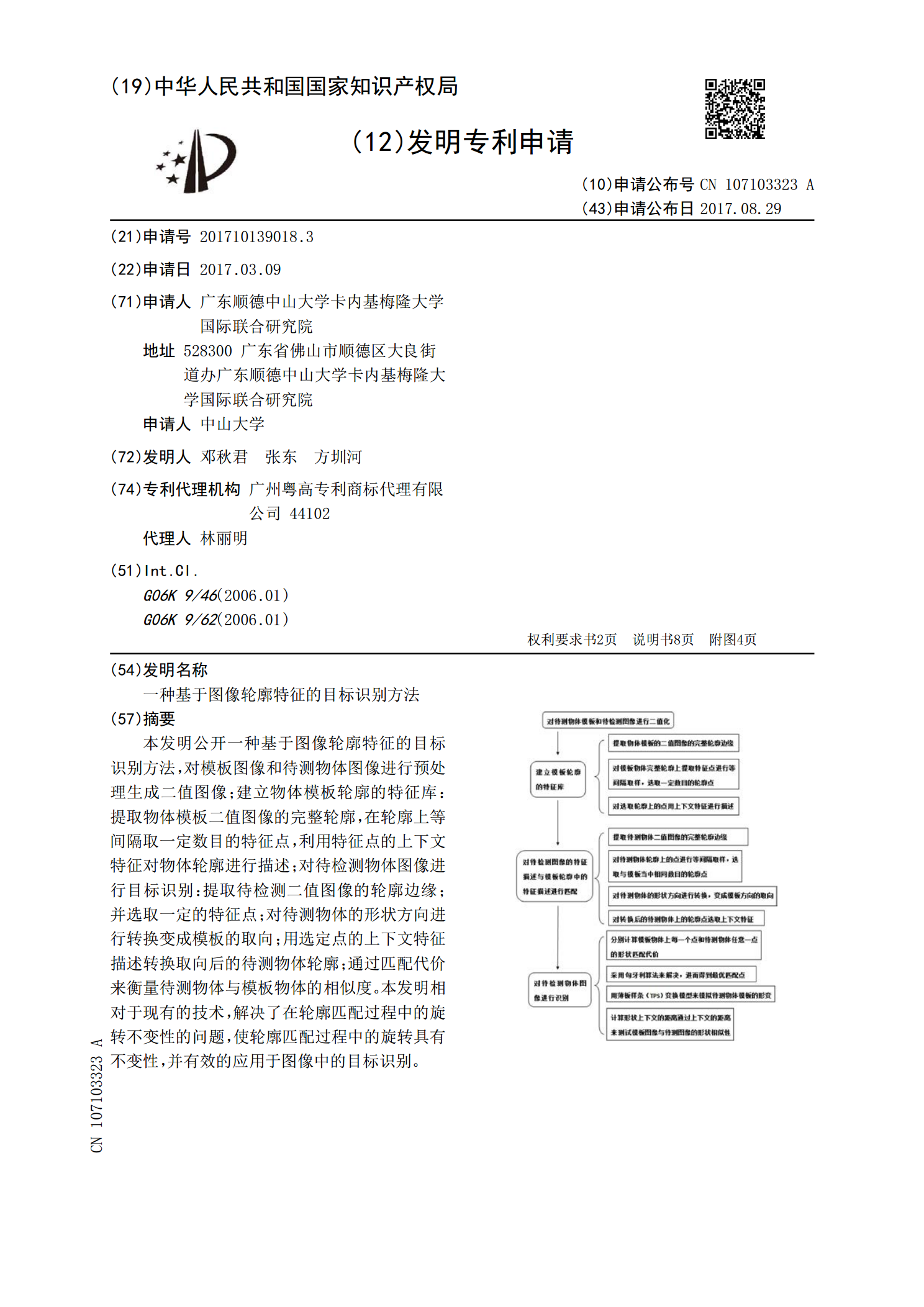
本发明公开一种基于图像轮廓特征的目标识别方法,对模板图像和待测物体图像进行预处理生成二值图像;建立物体模板轮廓的特征库:提取物体模板二值图像的完整轮廓,在轮廓上等间隔取一定数目的特征点,利用特征点的上下文特征对物体轮廓进行描述;对待检测物体图像进行目标识别:提取待检测二值图像的轮廓边缘;并选取一定的特征点;对待测物体的形状方向进行转换变成模板的取向;用选定点的上下文特征描述转换取向后的待测物体轮廓;通过匹配代价来衡量待测物体与模板物体的相似度。本发明相对于现有的技术,解决了在轮廓匹配过程中的旋转不变性的问