
一种基于轮廓特征的目标识别方法.pdf

如灵****姐姐


1/10
2/10

3/10

4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于轮廓特征的目标识别方法.pdf
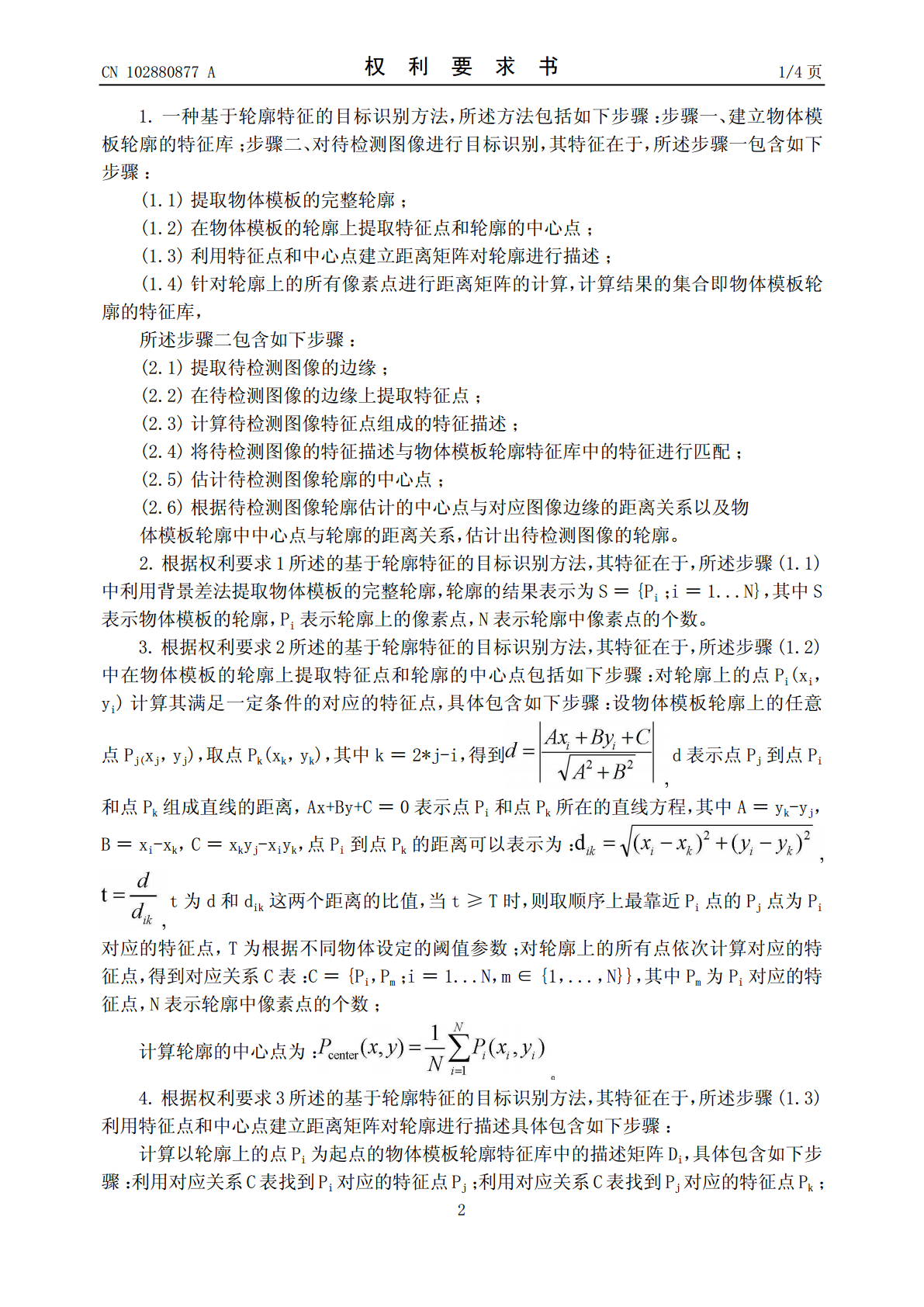
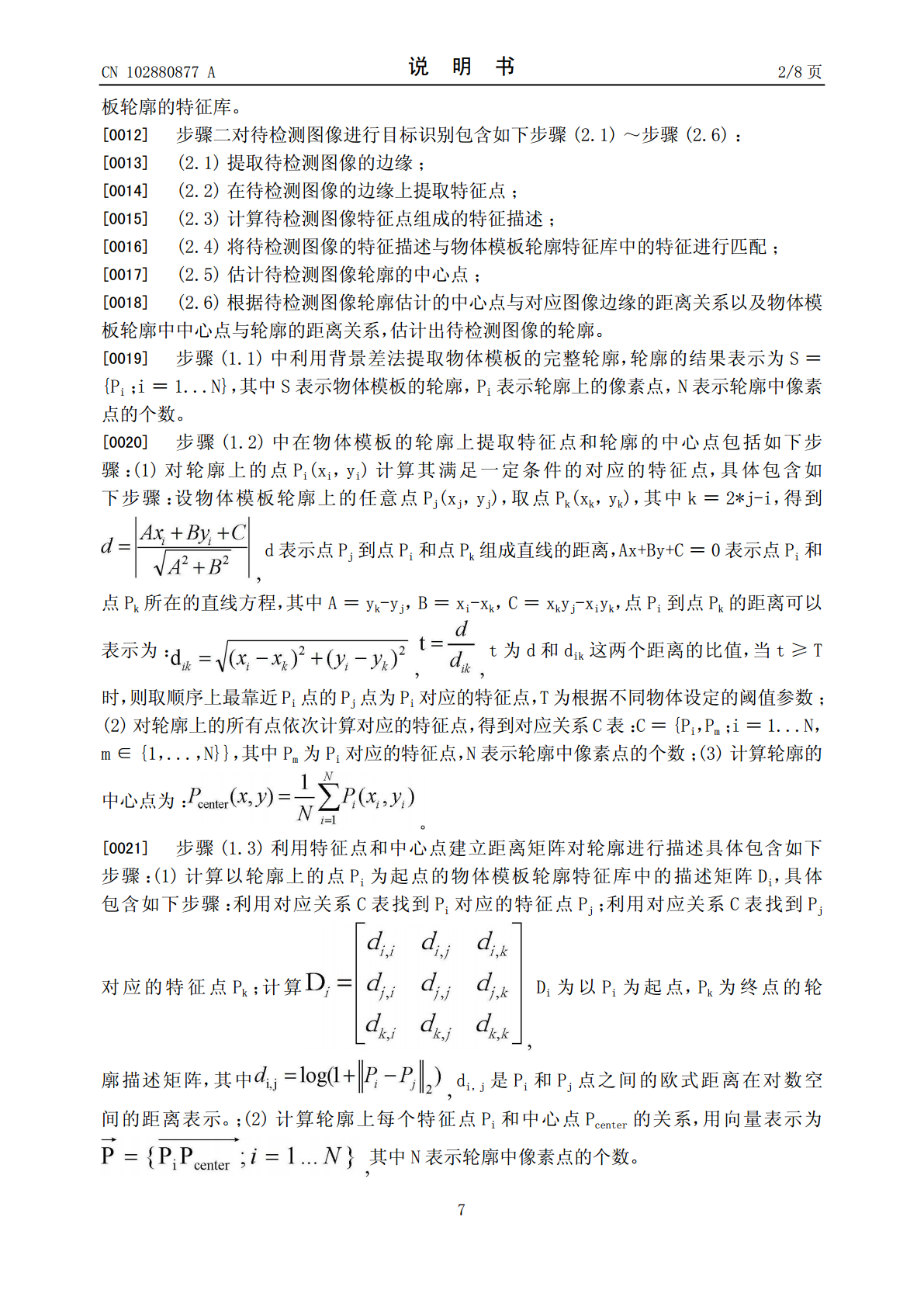
本发明公开了一种基于轮廓特征的目标识别方法,包括如下步骤一和步骤二:步骤一、建立物体模板轮廓的特征库:提取物体模板的完整轮廓;在轮廓上提取特征点和中心点;利用特征点和中心点建立距离矩阵对轮廓进行描述;针对轮廓上的所有像素点进行距离矩阵的计算;步骤二、对待检测图像进行目标识别:提取待检测图像的边缘;在边缘上提取特征点;计算特征点组成的特征描述;将待检测图像的特征描述与物体模板轮廓特征库中的特征进行匹配;估计待检测图像轮廓的中心点;估计待检测图像的轮廓。本发明相对于现有技术,解决了在轮廓匹配过程中的尺度问题,
一种基于轮廓特征的目标识别方法.pdf
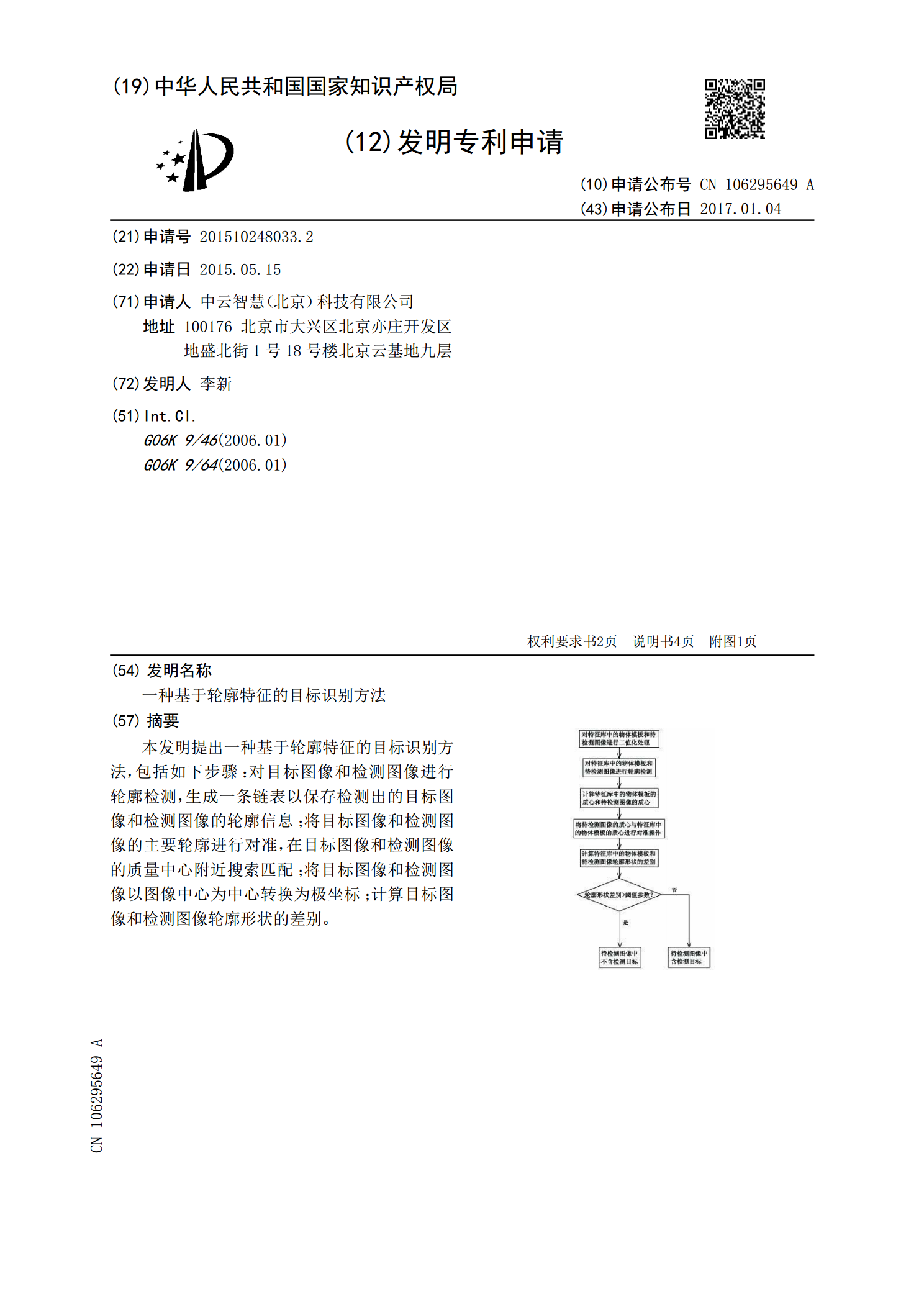
本发明提出一种基于轮廓特征的目标识别方法,包括如下步骤:对目标图像和检测图像进行轮廓检测,生成一条链表以保存检测出的目标图像和检测图像的轮廓信息;将目标图像和检测图像的主要轮廓进行对准,在目标图像和检测图像的质量中心附近搜索匹配;将目标图像和检测图像以图像中心为中心转换为极坐标;计算目标图像和检测图像轮廓形状的差别。
一种基于图像轮廓特征的目标识别方法.pdf
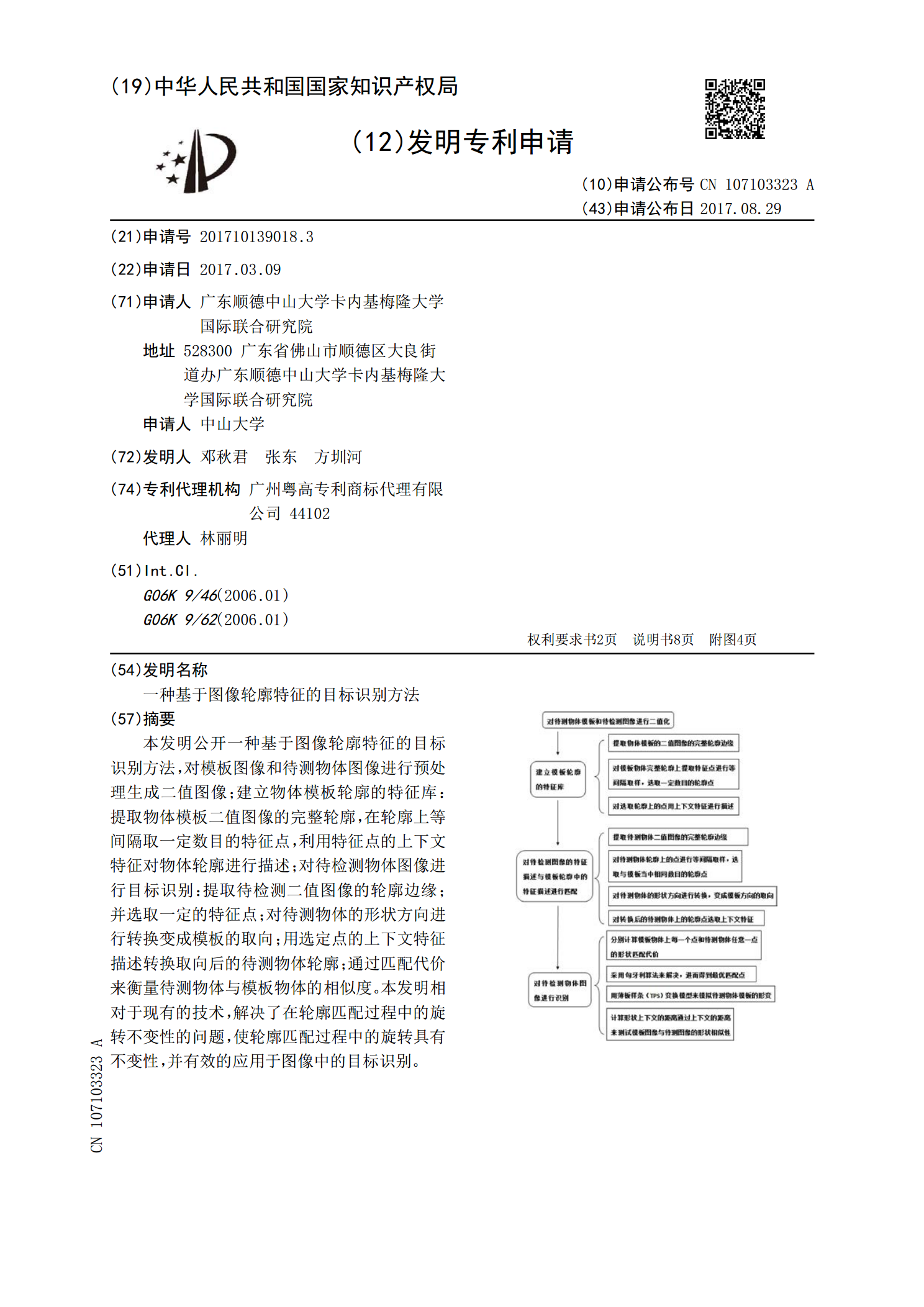
本发明公开一种基于图像轮廓特征的目标识别方法,对模板图像和待测物体图像进行预处理生成二值图像;建立物体模板轮廓的特征库:提取物体模板二值图像的完整轮廓,在轮廓上等间隔取一定数目的特征点,利用特征点的上下文特征对物体轮廓进行描述;对待检测物体图像进行目标识别:提取待检测二值图像的轮廓边缘;并选取一定的特征点;对待测物体的形状方向进行转换变成模板的取向;用选定点的上下文特征描述转换取向后的待测物体轮廓;通过匹配代价来衡量待测物体与模板物体的相似度。本发明相对于现有的技术,解决了在轮廓匹配过程中的旋转不变性的问

基于目标轮廓特征的图像识别方法.pdf
一种基于目标轮廓特征的图像识别方法,根据目标的轮廓特征而非整个模板计算相似度,并据此对模板进行分析得到最小类间距离,在搜索过程中,结合最小类间距离及适应度对群体进行划分,并通过局部搜索快速得到局部极值。图像识别是工业自动化领域中的重要课题,特别是当目标之间存在交错时,如何有效的识别多个目标是亟待解决的问题。本发明有效提高了搜索效率,保证了识别的实时性。将这种方法应用于半导体检测及生产设备机器视觉系统中,能够高效准确地识别定位场景图像中的多个重复目标。

基于轮廓弦角特征的遮挡目标识别方法.pdf
本发明涉及一种基于轮廓弦角特征的遮挡目标识别方法,通过建立多个目标图像的局部特征的模板库;提取出目标边缘的轮廓特征;构造各轮廓点的弦角特征描述子;利用弦角特征描述子的自包含属性对存在遮挡的轮廓进行描述,获得轮廓段的弦角特征描述矩阵;采用L1度量方法计算目标图像轮廓点的弦角特征描述子与模板库中局部特征的轮廓点的弦角特征描述子之间的距离,获得匹配代价矩阵;利用积分图算法计算匹配代价矩阵的相似度,实现部分遮挡目标的识别。本发明可以对目标形状进行轮廓空间位置特征的提取,实现存在遮挡目标的识别,具有尺度不变性、旋转