
一种基于事件相机的海上船舶目标识别方法.pdf

努力****爱敏


1/9

2/9

3/9

4/9
5/9
6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于事件相机的海上船舶目标识别方法.pdf
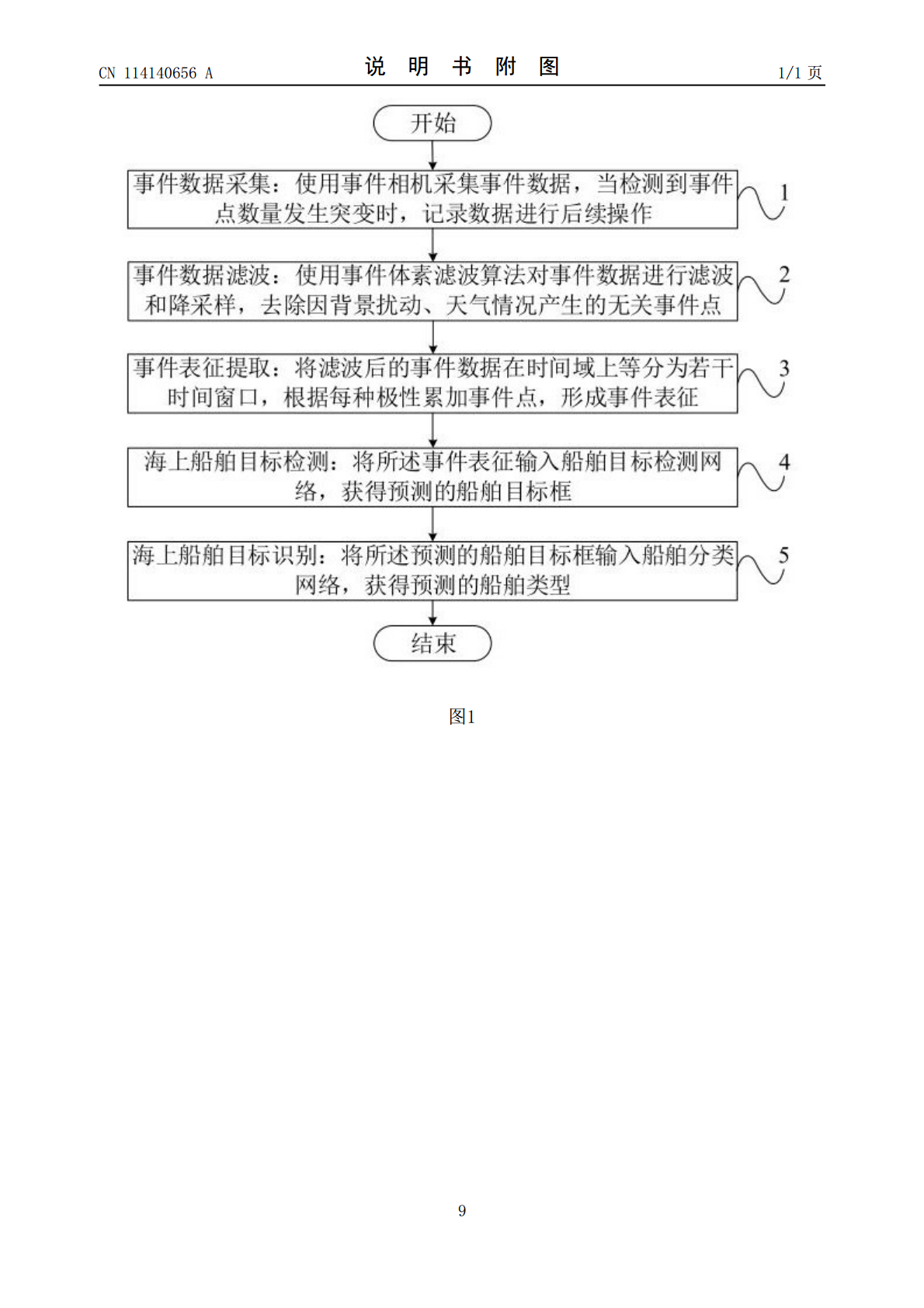
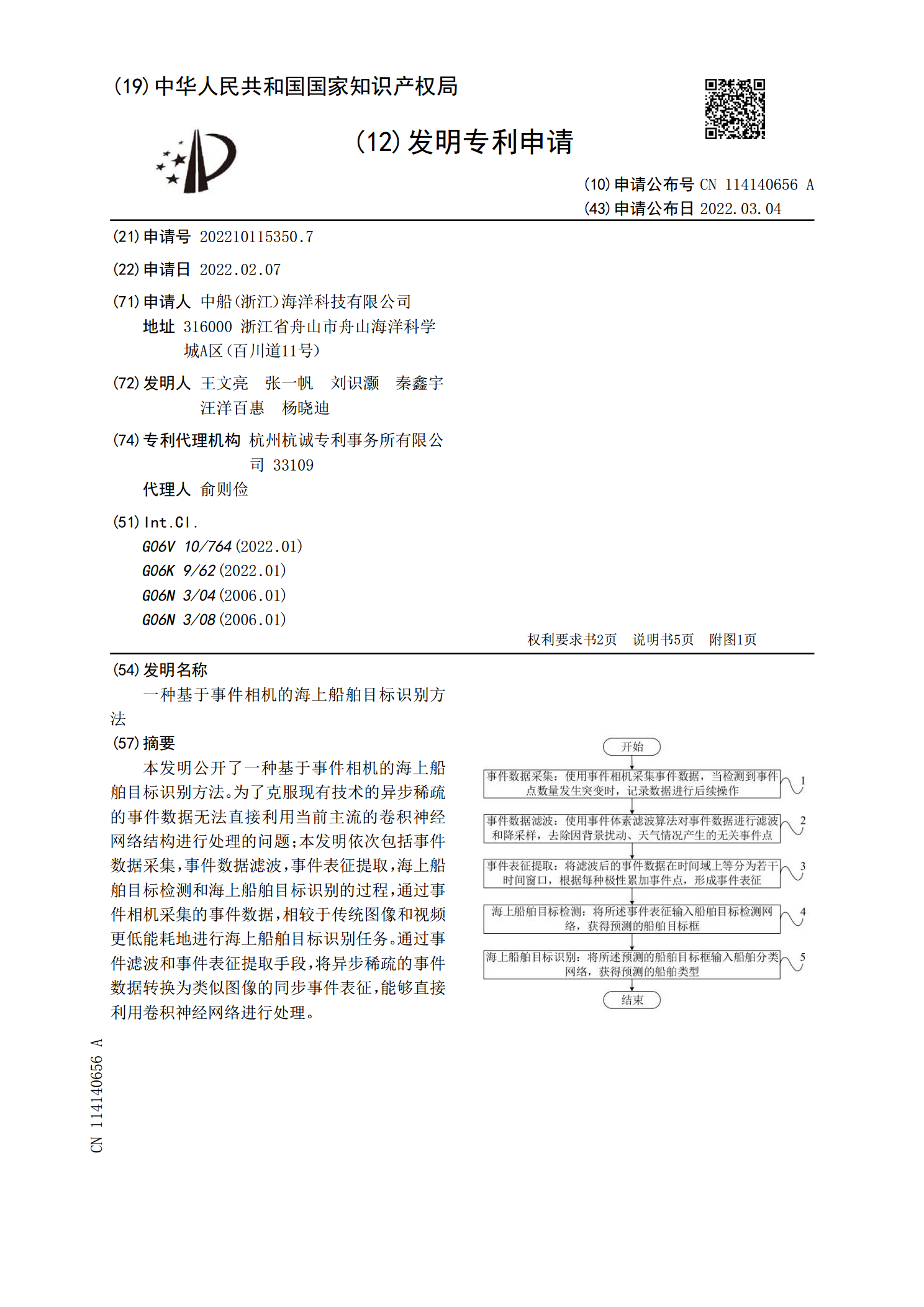
本发明公开了一种基于事件相机的海上船舶目标识别方法。为了克服现有技术的异步稀疏的事件数据无法直接利用当前主流的卷积神经网络结构进行处理的问题;本发明依次包括事件数据采集,事件数据滤波,事件表征提取,海上船舶目标检测和海上船舶目标识别的过程,通过事件相机采集的事件数据,相较于传统图像和视频更低能耗地进行海上船舶目标识别任务。通过事件滤波和事件表征提取手段,将异步稀疏的事件数据转换为类似图像的同步事件表征,能够直接利用卷积神经网络进行处理。

一种基于深度学习的海上船舶识别方法.pdf
一种基于深度学习的海上船舶识别方法,属于图像处理领域。首先通过无人机拍摄海面照片,海面照片构成数据集;对海面照片进行预处理;基于深度学习的用于无人机的海上船只识别方法构造的是解码与编码皆为5层的U型升级网络,每个U型神经网络中增加了残差块;预处理后的训练集送入U型神经网络,使用Adam梯度下降进行训练,训练过程中利用验证集来判断网络的精确度,并保留网络参数;然后将测试集输入训练好的网络中,将测试集输入U型神经网络中,使用交叉熵代价函数获得损失值,但不进行反向传播,并将得到的结果与真实标签图进行对比,以此来
一种基于相机特征分离的目标重识别方法.pdf
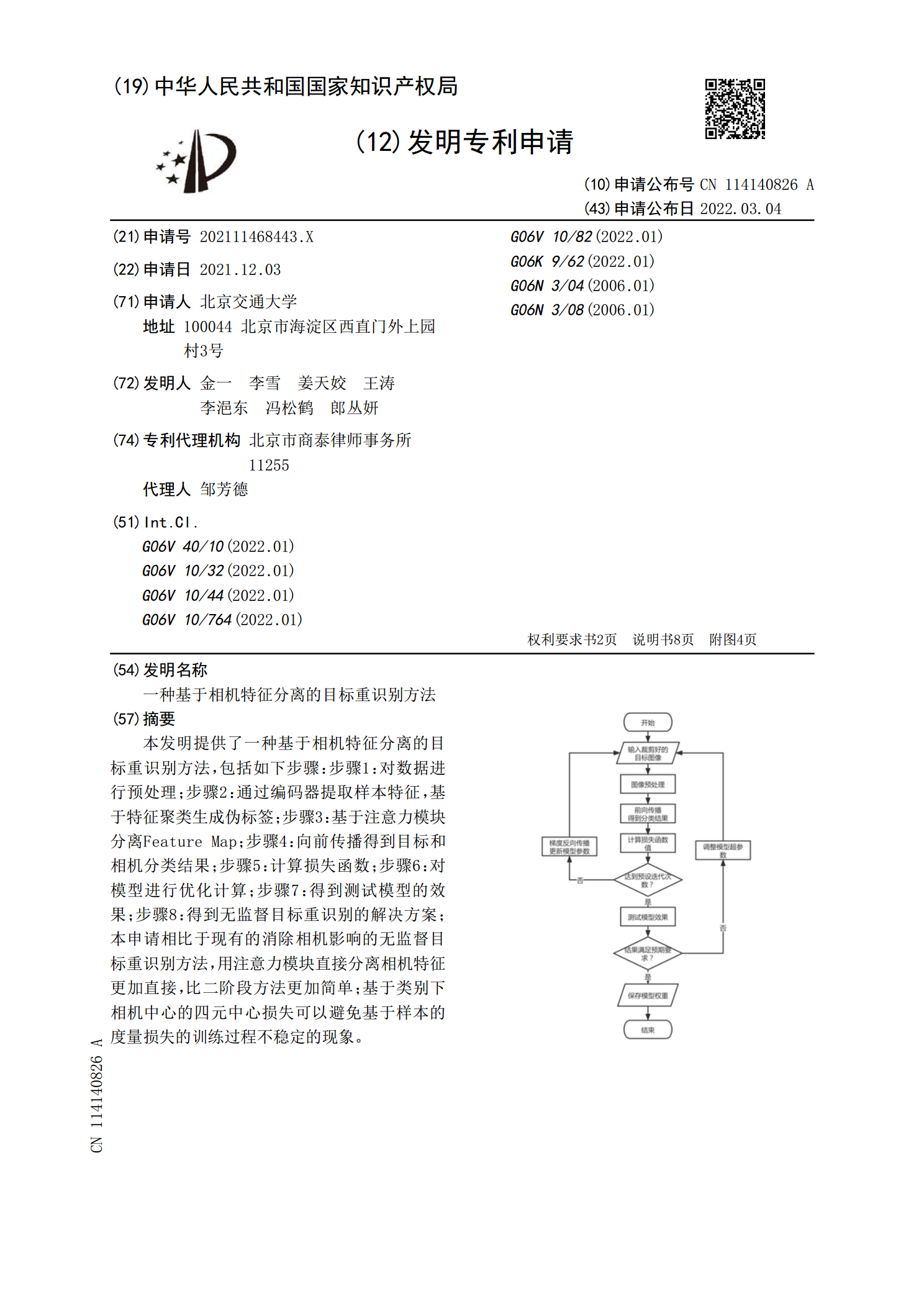
本发明提供了一种基于相机特征分离的目标重识别方法,包括如下步骤:步骤1:对数据进行预处理;步骤2:通过编码器提取样本特征,基于特征聚类生成伪标签;步骤3:基于注意力模块分离FeatureMap;步骤4:向前传播得到目标和相机分类结果;步骤5:计算损失函数;步骤6:对模型进行优化计算;步骤7:得到测试模型的效果;步骤8:得到无监督目标重识别的解决方案;本申请相比于现有的消除相机影响的无监督目标重识别方法,用注意力模块直接分离相机特征更加直接,比二阶段方法更加简单;基于类别下相机中心的四元中心损失可以避免基
一种基于图像深度学习的海上目标识别方法.pdf
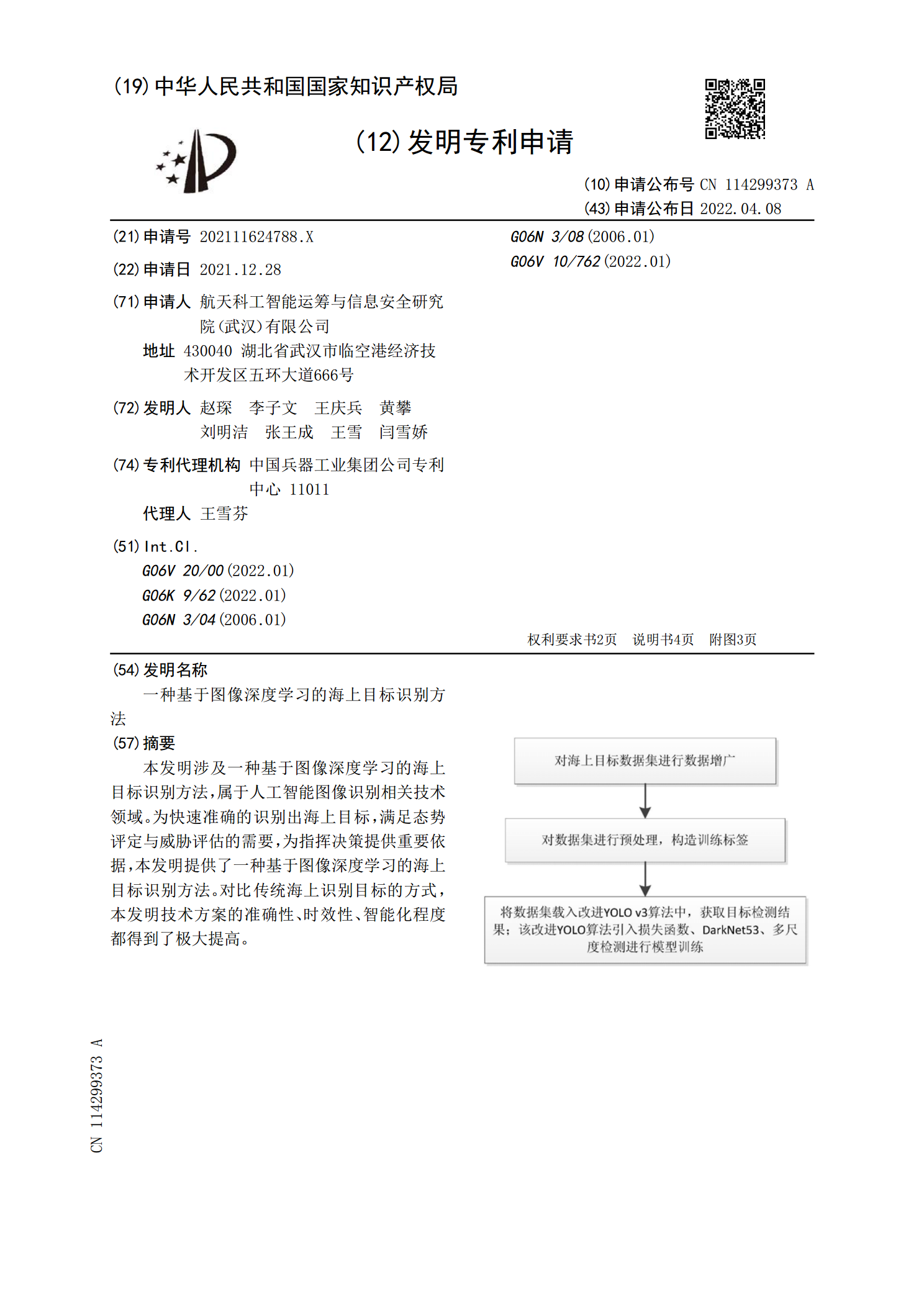
本发明涉及一种基于图像深度学习的海上目标识别方法,属于人工智能图像识别相关技术领域。为快速准确的识别出海上目标,满足态势评定与威胁评估的需要,为指挥决策提供重要依据,本发明提供了一种基于图像深度学习的海上目标识别方法。对比传统海上识别目标的方式,本发明技术方案的准确性、时效性、智能化程度都得到了极大提高。

基于RCS的海上目标识别方法研究.pptx
基于RCS的海上目标识别方法研究目录添加章节标题背景介绍研究背景RCS概述海上目标识别的重要性RCS与海上目标识别的关系RCS在海上目标识别中的应用RCS与海上目标识别的关联性RCS在海上目标识别中的优势基于RCS的海上目标识别方法基于RCS的海上目标识别流程基于RCS的海上目标识别算法基于RCS的海上目标识别实验结果实验结果分析实验数据来源及处理方法实验结果展示及分析实验结果与理论预期的对比结论与展望研究结论研究不足与展望对未来研究的建议参考文献THANKYOU