
一种智能门式起重机作业方法及系统.pdf

小宏****aa


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种智能门式起重机作业方法及系统.pdf
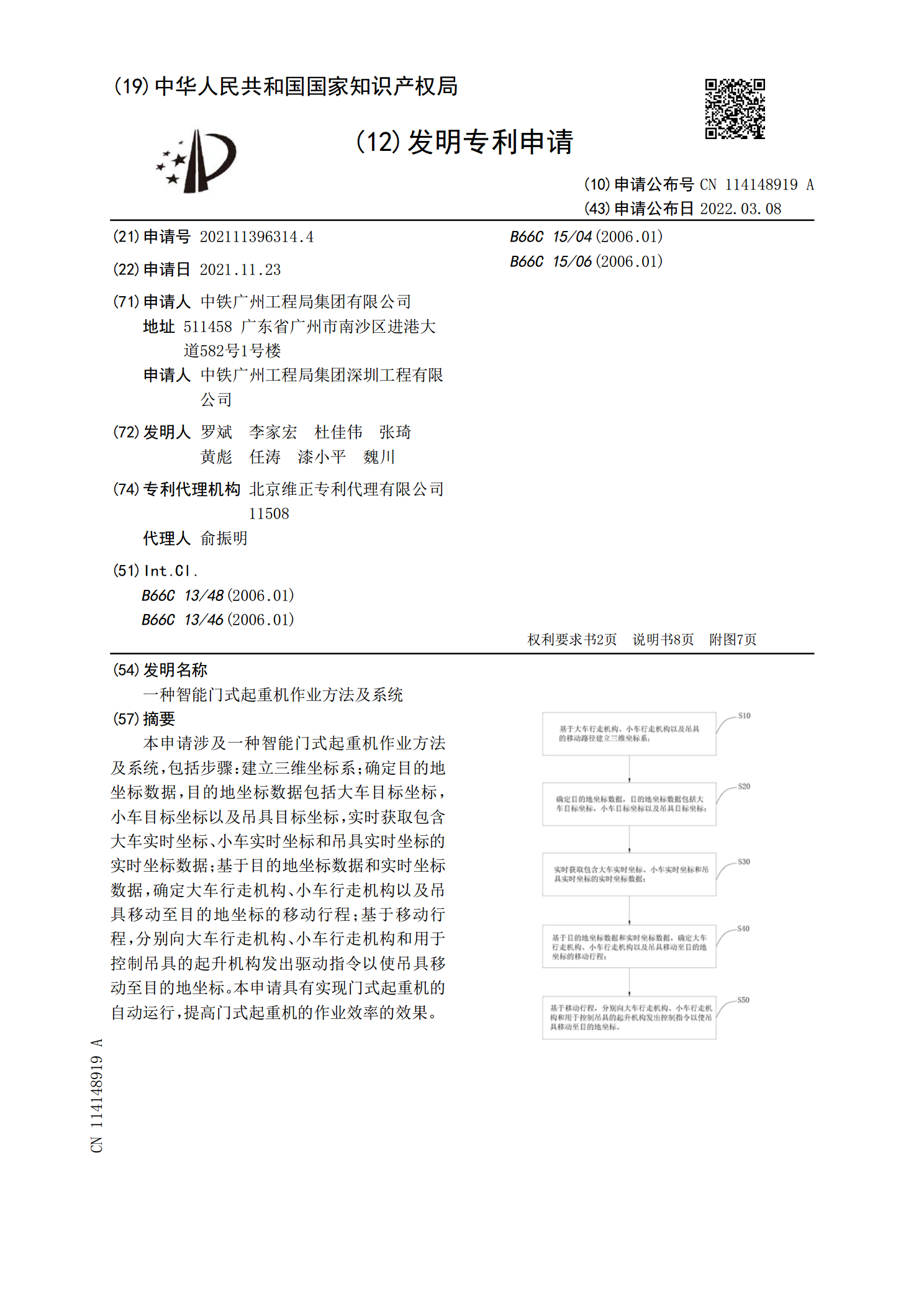
本申请涉及一种智能门式起重机作业方法及系统,包括步骤:建立三维坐标系;确定目的地坐标数据,目的地坐标数据包括大车目标坐标,小车目标坐标以及吊具目标坐标,实时获取包含大车实时坐标、小车实时坐标和吊具实时坐标的实时坐标数据;基于目的地坐标数据和实时坐标数据,确定大车行走机构、小车行走机构以及吊具移动至目的地坐标的移动行程;基于移动行程,分别向大车行走机构、小车行走机构和用于控制吊具的起升机构发出驱动指令以使吊具移动至目的地坐标。本申请具有实现门式起重机的自动运行,提高门式起重机的作业效率的效果。

一种双钩智能门式起重机.pdf
本发明公开了一种双钩智能门式起重机,该起重机包括两组支腿,每组的两个支腿之间均滑动连接有端梁,两个端梁之间固定连接有两个主梁,两个主梁顶部通过小车车架固定连接有双联卷筒,双联卷筒上缠绕有钢丝绳,主梁下方安装有安装板,安装板顶部固定连接有动滑轮,两根钢丝绳分别绕过位于其下方的动滑轮后固定连接在小车车架上,安装板底部安装有两个吊钩;小车车架上固定连接有竖直设置的导柱,导柱为底部敞口的中空结构且导柱内滑动连接有滑柱,滑柱底部固定连接在安装板顶部的四角处。通过这样的设置使得滑柱和导柱对该起重机升降的过程进行导向,

一种无轨智能门式起重机及其工作方法.pdf
本发明公开了一种无轨智能门式起重机及其工作方法,包括横梁,所述横梁底部的左、右两侧对称设置有支撑架,所述支撑架的底部设置有提升机,所述支撑架底部固定连接有地梁架,所述地梁架内壁的一侧设置有驱动轮,所述地梁架内壁的另一侧设置有转向轮,所述地梁架的顶部固定连接电控箱,通过在地梁架的内部且位于转向轮和驱动轮的一侧设置清扫组件,配合长轴上的凸轮和第一固定套与第二固定套之间的滑动杆和顶力弹簧,能够对清扫盘进行升降,同时利用安装组件将转动电机上的动力轴和清扫盘进行连接,进而能够对转向轮和驱动轮需要行走的地面进行清扫,
智能桥门式起重机.pdf
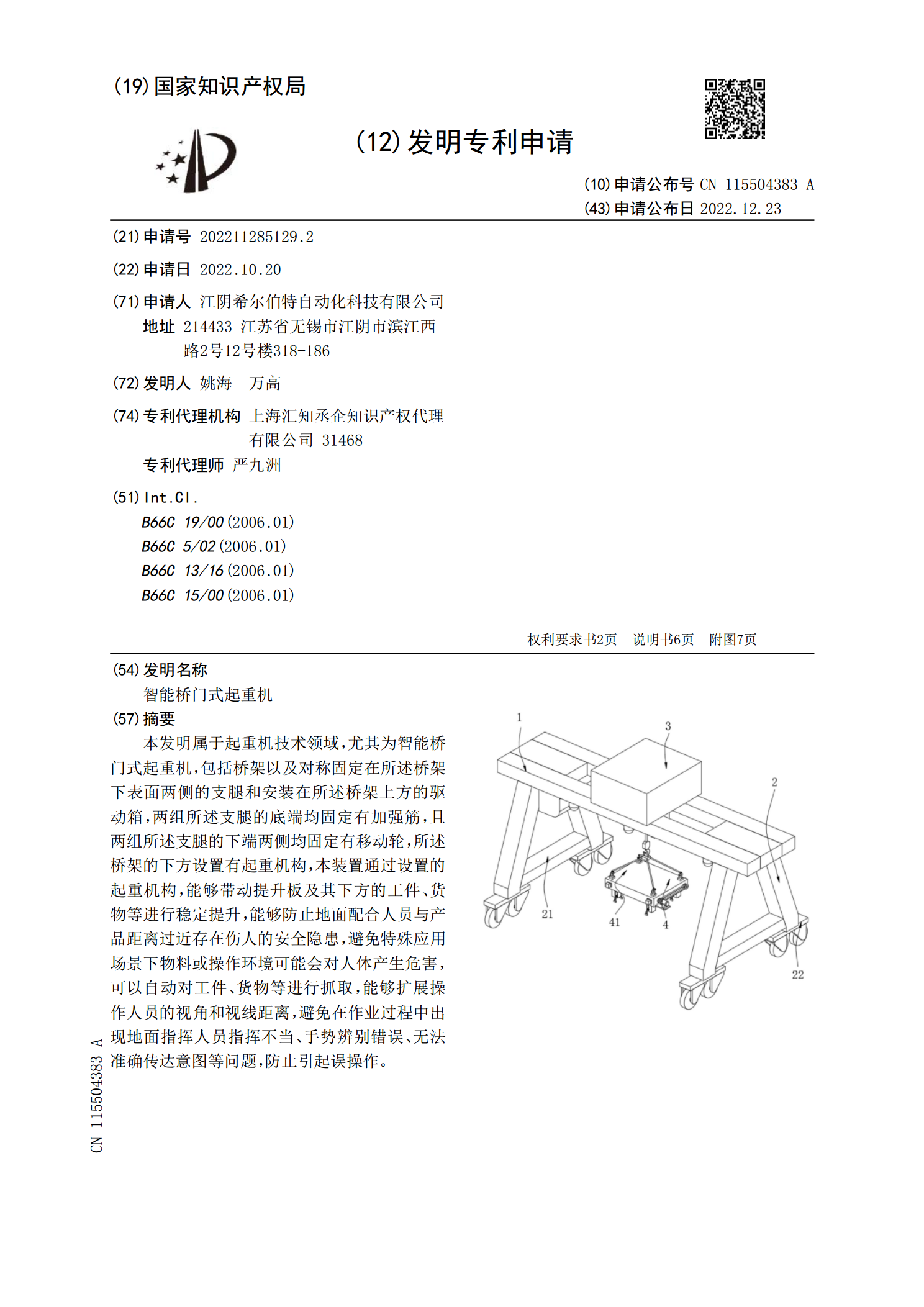
本发明属于起重机技术领域,尤其为智能桥门式起重机,包括桥架以及对称固定在所述桥架下表面两侧的支腿和安装在所述桥架上方的驱动箱,两组所述支腿的底端均固定有加强筋,且两组所述支腿的下端两侧均固定有移动轮,所述桥架的下方设置有起重机构,本装置通过设置的起重机构,能够带动提升板及其下方的工件、货物等进行稳定提升,能够防止地面配合人员与产品距离过近存在伤人的安全隐患,避免特殊应用场景下物料或操作环境可能会对人体产生危害,可以自动对工件、货物等进行抓取,能够扩展操作人员的视角和视线距离,避免在作业过程中出现地面指挥人

无轨智能门式起重机.pdf
本发明公开了一种无轨智能门式起重机,包括横梁、所述横梁下面左右两侧对称设置有支撑架、所述支撑架下面设有地梁、所述地梁下面两端对称设置有旋转梁,所述旋转梁可相对所述地梁转动,所述旋转梁设有行走装置,所述横梁下面设有提升装置;所述支撑架包括两个人字形支架和连接承,所述人字形支架包括两根支撑斜梁,所述连接承连接在两根支撑斜梁之间。本发明不需要道轨可在车间式厂区行走吊物,可以自带电池,也可以自带发电机,还可以通过连接三相电源,吊货无死角,可以任意调整门吊方向和角度,能像开车一样前后左右调整还可原地旋转。