
一种激光焊接系统及方法.pdf

秀美****甜v

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
激光焊接系统及焊接方法.pdf
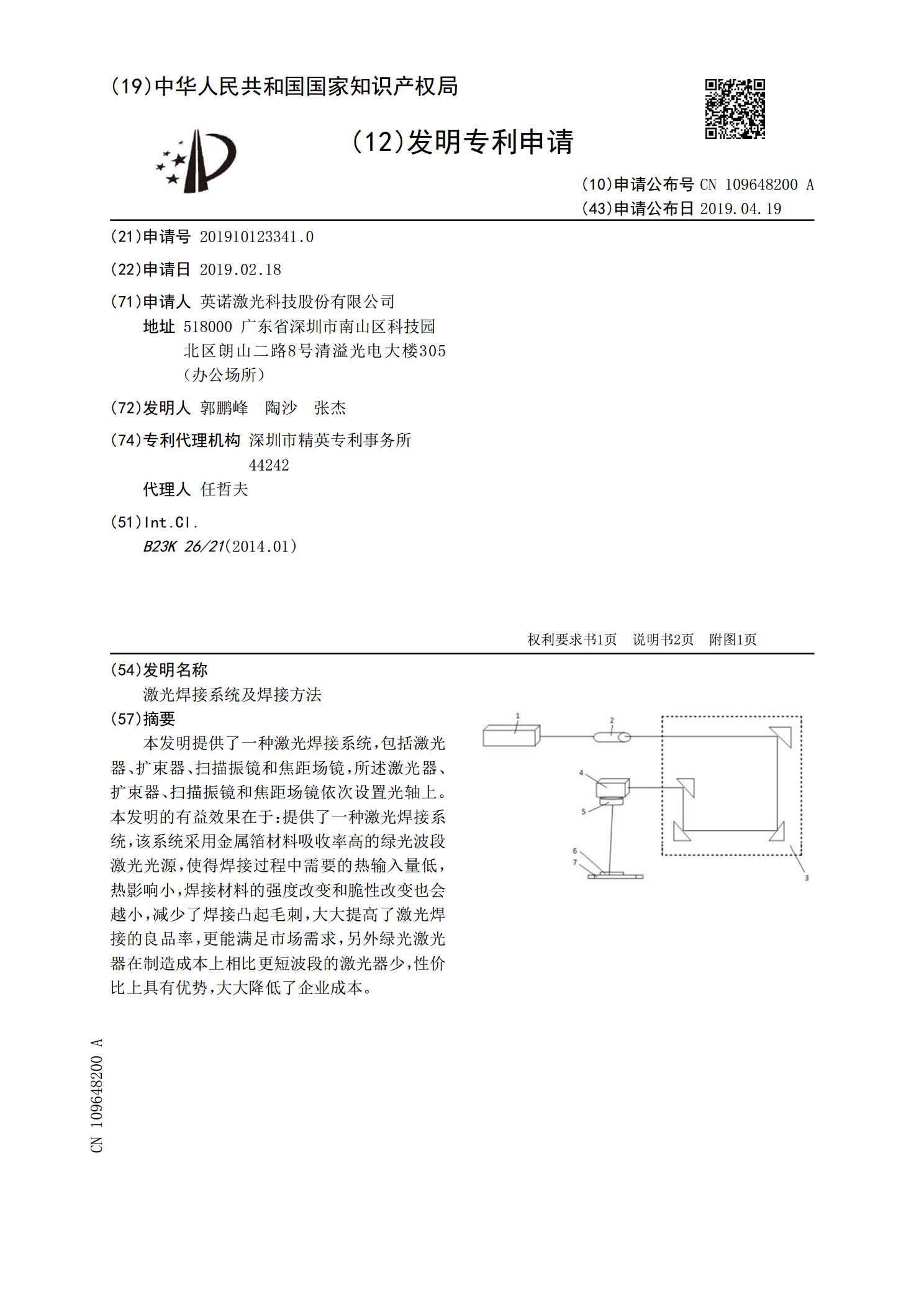
本发明提供了一种激光焊接系统,包括激光器、扩束器、扫描振镜和焦距场镜,所述激光器、扩束器、扫描振镜和焦距场镜依次设置光轴上。本发明的有益效果在于:提供了一种激光焊接系统,该系统采用金属箔材料吸收率高的绿光波段激光光源,使得焊接过程中需要的热输入量低,热影响小,焊接材料的强度改变和脆性改变也会越小,减少了焊接凸起毛刺,大大提高了激光焊接的良品率,更能满足市场需求,另外绿光激光器在制造成本上相比更短波段的激光器少,性价比上具有优势,大大降低了企业成本。

一种激光焊接系统及方法.pdf
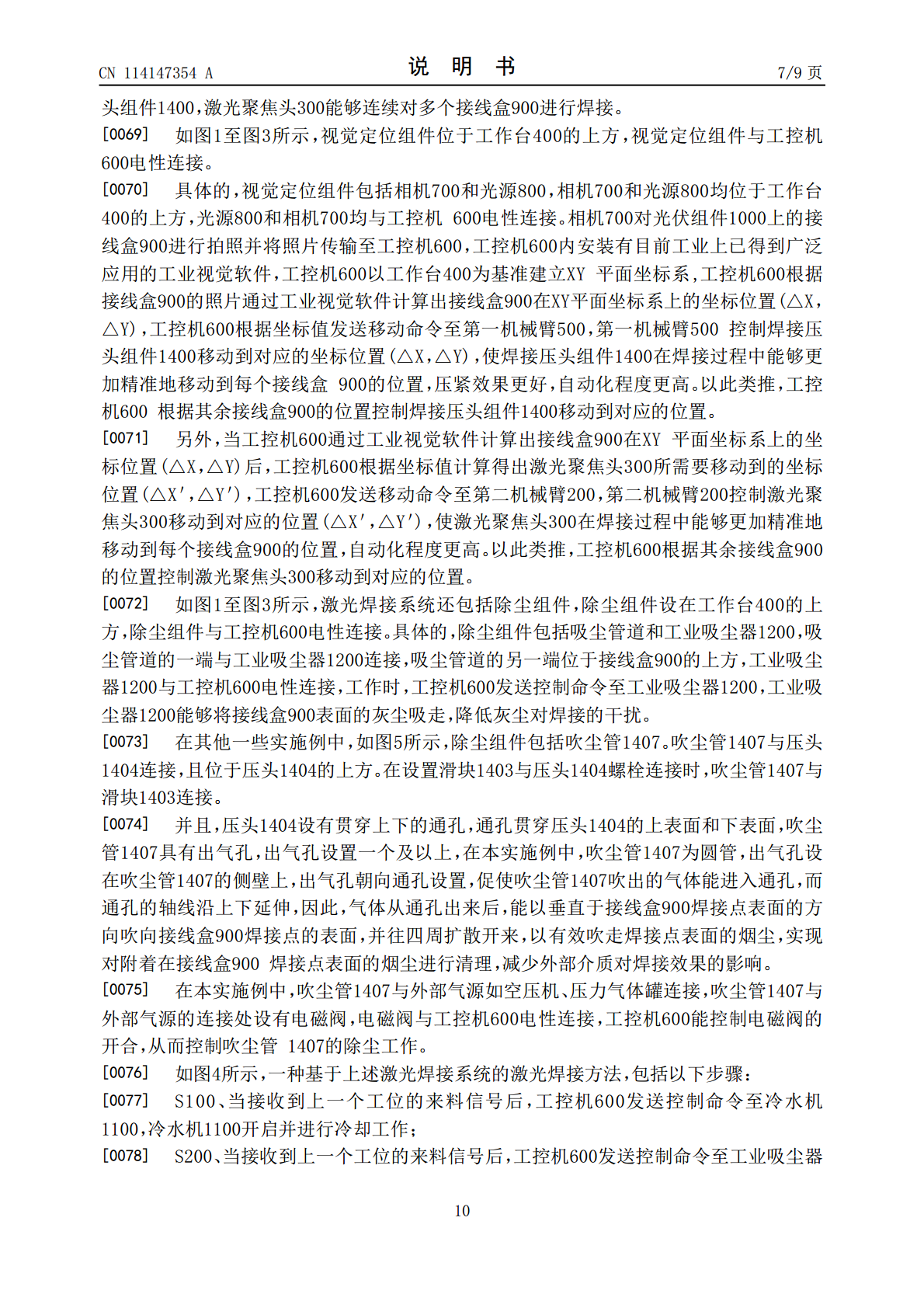
本发明公开一种激光焊接系统及方法,在激光焊接系统中,上下料组件能将带接线盒的光伏组件转移到工作台上;装夹组件设在工作台上以对光伏组件夹持定位;焊接压头组件包括连接板、安装座、弹性件、压头和位置检测器,连接板分别与第一机械臂和安装座连接,弹性件上端与安装座连接且下端与压头连接,位置检测器设在安装座上,压头设有位于位置检测器下方的感应片;激光发生器与激光聚焦组件连接以使激光传输至激光聚焦组件;激光聚焦组件与第二机械臂连接;视觉定位组件位于工作台上方,视觉定位组件和位置检测器分别与工控机电连接,工控机分别与激光
激光焊接系统及方法.pdf
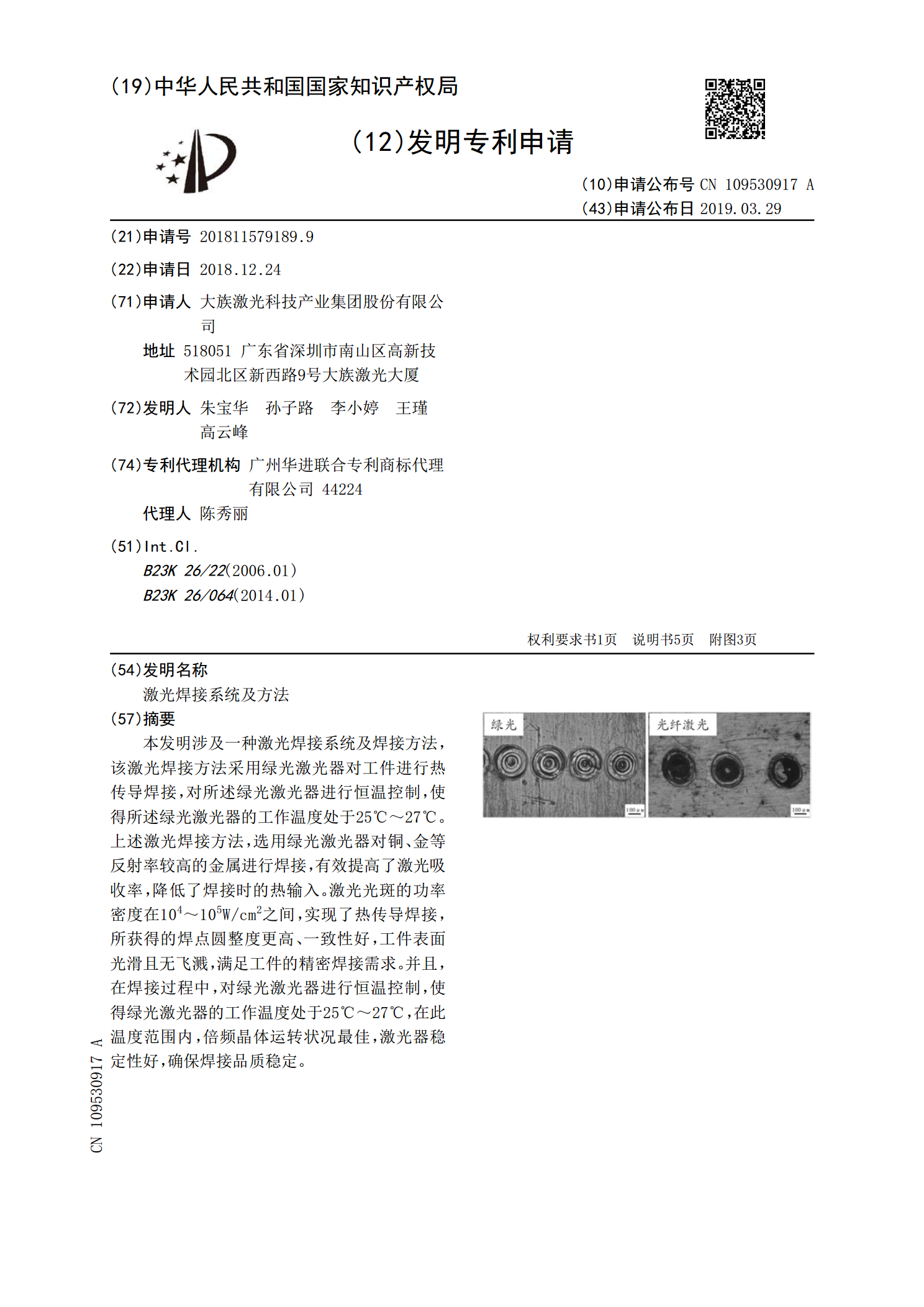
本发明涉及一种激光焊接系统及焊接方法,该激光焊接方法采用绿光激光器对工件进行热传导焊接,对所述绿光激光器进行恒温控制,使得所述绿光激光器的工作温度处于25℃~27℃。上述激光焊接方法,选用绿光激光器对铜、金等反射率较高的金属进行焊接,有效提高了激光吸收率,降低了焊接时的热输入。激光光斑的功率密度在10
激光焊接系统和方法.pdf
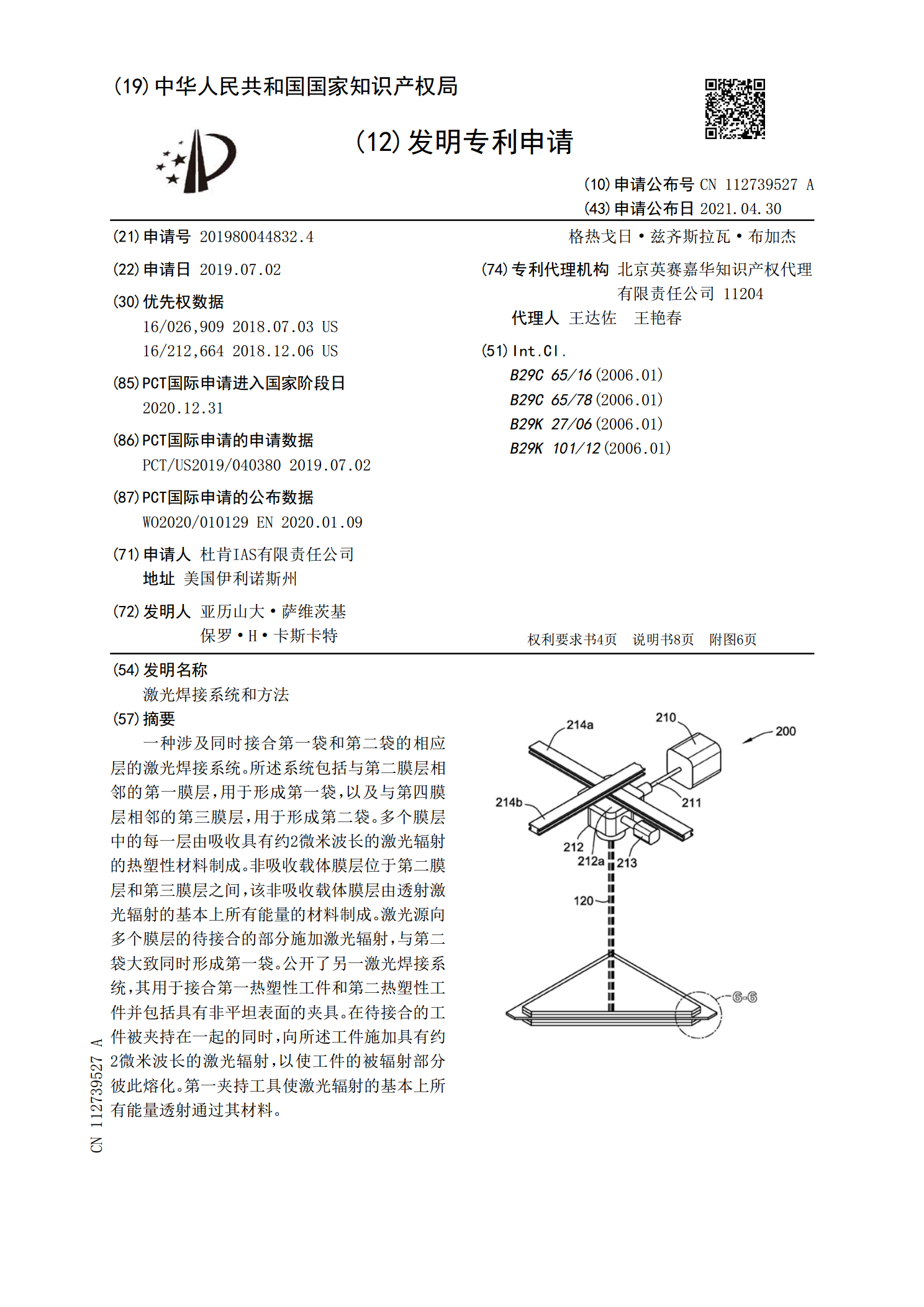
一种涉及同时接合第一袋和第二袋的相应层的激光焊接系统。所述系统包括与第二膜层相邻的第一膜层,用于形成第一袋,以及与第四膜层相邻的第三膜层,用于形成第二袋。多个膜层中的每一层由吸收具有约2微米波长的激光辐射的热塑性材料制成。非吸收载体膜层位于第二膜层和第三膜层之间,该非吸收载体膜层由透射激光辐射的基本上所有能量的材料制成。激光源向多个膜层的待接合的部分施加激光辐射,与第二袋大致同时形成第一袋。公开了另一激光焊接系统,其用于接合第一热塑性工件和第二热塑性工件并包括具有非平坦表面的夹具。在待接合的工件被夹持在一

一种抑制激光焊接气孔的焊接方法与系统.pdf
本发明涉及一种抑制激光焊接气孔的焊接方法与系统,其特征在于:步骤1:提供第一母材和第二母材,采用专用夹具将母材上下垂直叠接并留有间隙,获得待焊接试件;步骤2:提供负压装置,负压装置包括抽气泵,压力调节阀,吸附组件;步骤3:将负压装置吸附组件与待焊接试件连通,开启激光发生器,激光束垂直辐照待焊接试件上表面,开启保护气体吹气装置,开启负压装置;步骤4:激光束沿欲焊接路线移动直到焊接完成,关闭其他相应的装置,完成焊接过程。在本发明中,焊接间隙的存在使得小孔前沿熔融金属向间隙流动,小孔前沿稳定性提高。同时,负压装