
一种基于深度学习的激光雷达点云目标检测方法.pdf

一条****88

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于深度学习的激光雷达点云目标检测方法.pdf
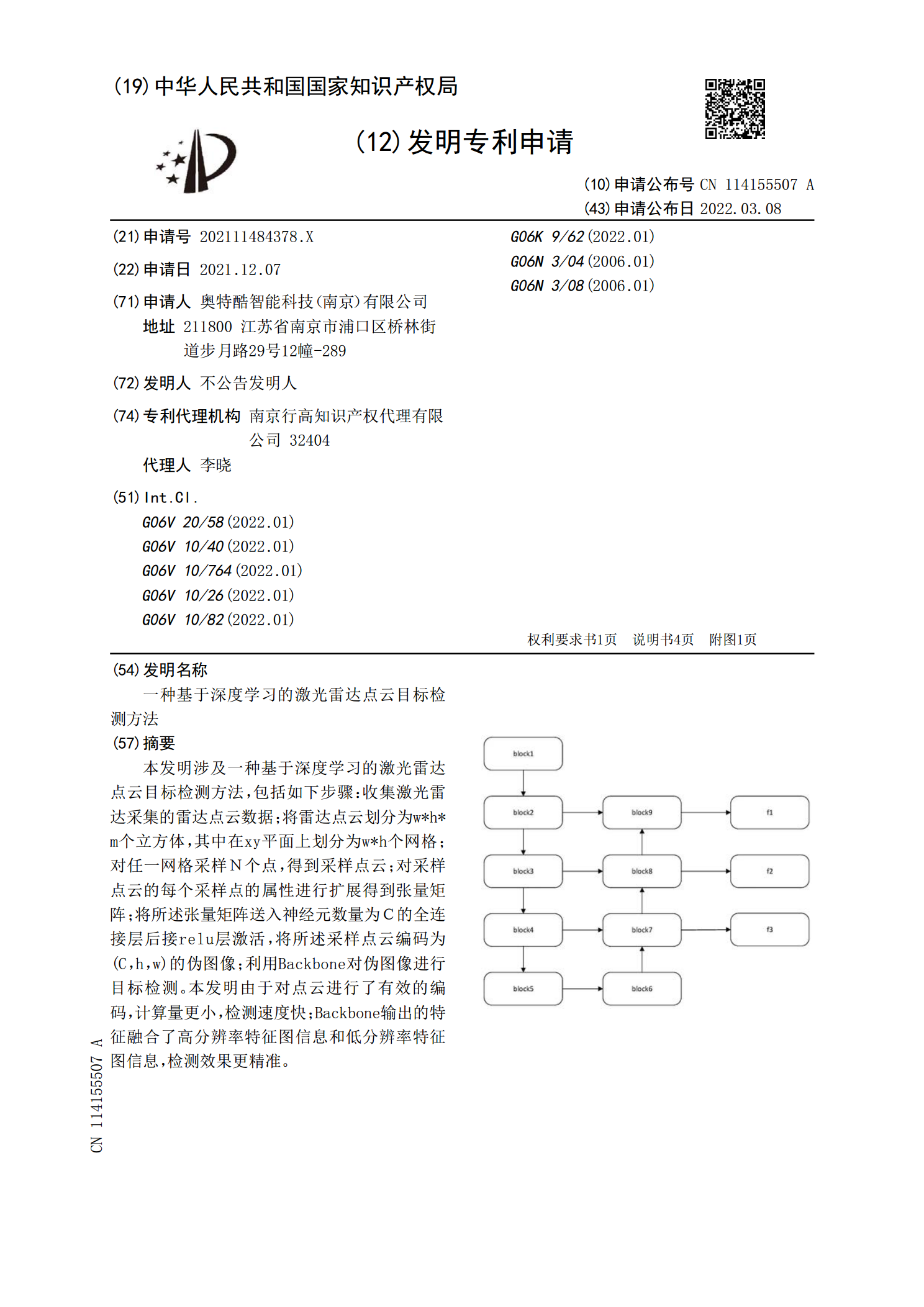
本发明涉及一种基于深度学习的激光雷达点云目标检测方法,包括如下步骤:收集激光雷达采集的雷达点云数据;将雷达点云划分为w*h*m个立方体,其中在xy平面上划分为w*h个网格;对任一网格采样N个点,得到采样点云;对采样点云的每个采样点的属性进行扩展得到张量矩阵;将所述张量矩阵送入神经元数量为C的全连接层后接relu层激活,将所述采样点云编码为(C,h,w)的伪图像;利用Backbone对伪图像进行目标检测。本发明由于对点云进行了有效的编码,计算量更小,检测速度快;Backbone输出的特征融合了高分辨率特征图
一种基于激光雷达点云的车辆目标检测方法.pdf
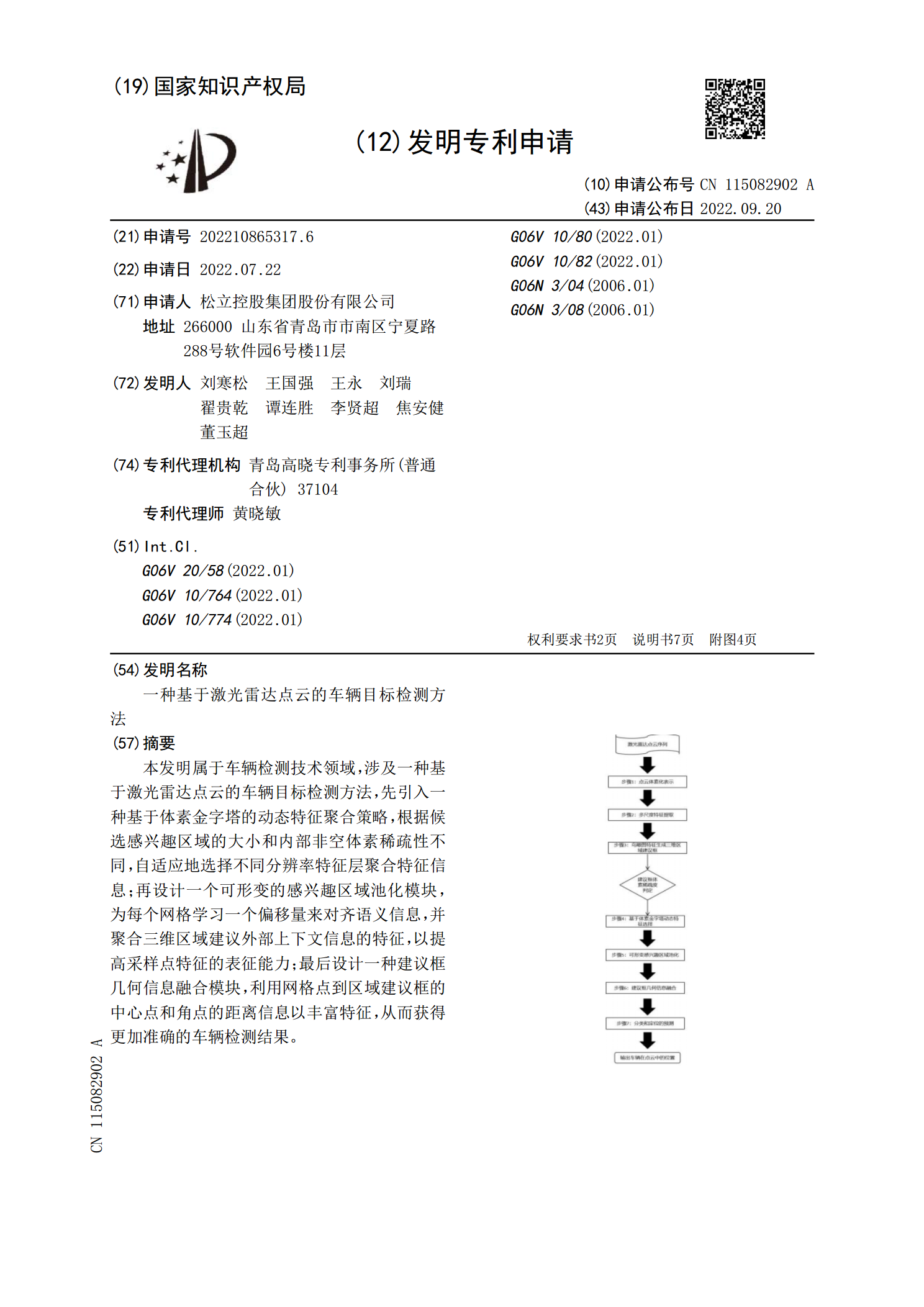
本发明属于车辆检测技术领域,涉及一种基于激光雷达点云的车辆目标检测方法,先引入一种基于体素金字塔的动态特征聚合策略,根据候选感兴趣区域的大小和内部非空体素稀疏性不同,自适应地选择不同分辨率特征层聚合特征信息;再设计一个可形变的感兴趣区域池化模块,为每个网格学习一个偏移量来对齐语义信息,并聚合三维区域建议外部上下文信息的特征,以提高采样点特征的表征能力;最后设计一种建议框几何信息融合模块,利用网格点到区域建议框的中心点和角点的距离信息以丰富特征,从而获得更加准确的车辆检测结果。
一种基于深度学习的激光点云目标检测识别装置及方法.pdf
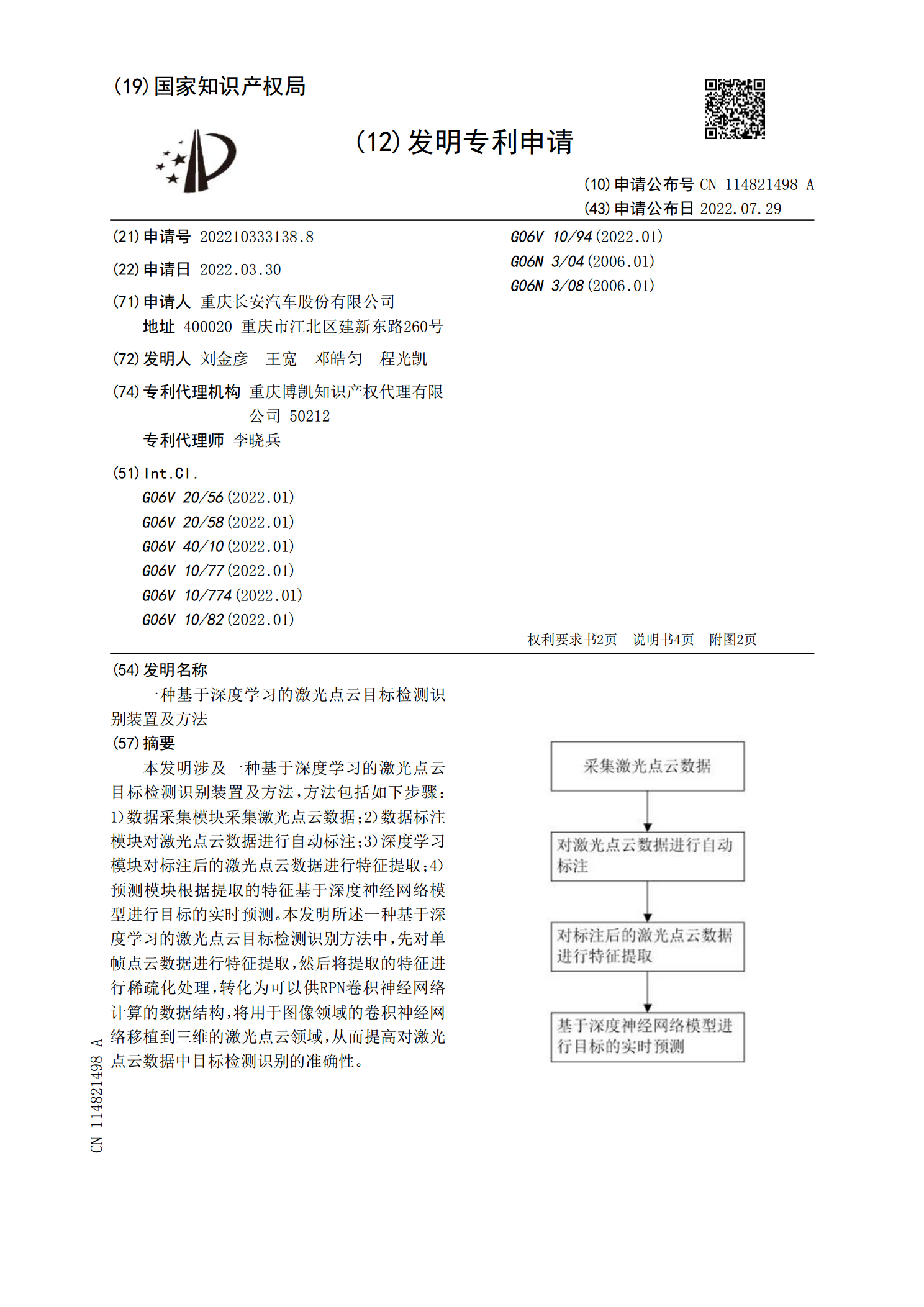
本发明涉及一种基于深度学习的激光点云目标检测识别装置及方法,方法包括如下步骤:1)数据采集模块采集激光点云数据;2)数据标注模块对激光点云数据进行自动标注;3)深度学习模块对标注后的激光点云数据进行特征提取;4)预测模块根据提取的特征基于深度神经网络模型进行目标的实时预测。本发明所述一种基于深度学习的激光点云目标检测识别方法中,先对单帧点云数据进行特征提取,然后将提取的特征进行稀疏化处理,转化为可以供RPN卷积神经网络计算的数据结构,将用于图像领域的卷积神经网络移植到三维的激光点云领域,从而提高对激光点云
基于相机图像驱动的激光雷达点云目标检测方法及系统.pdf
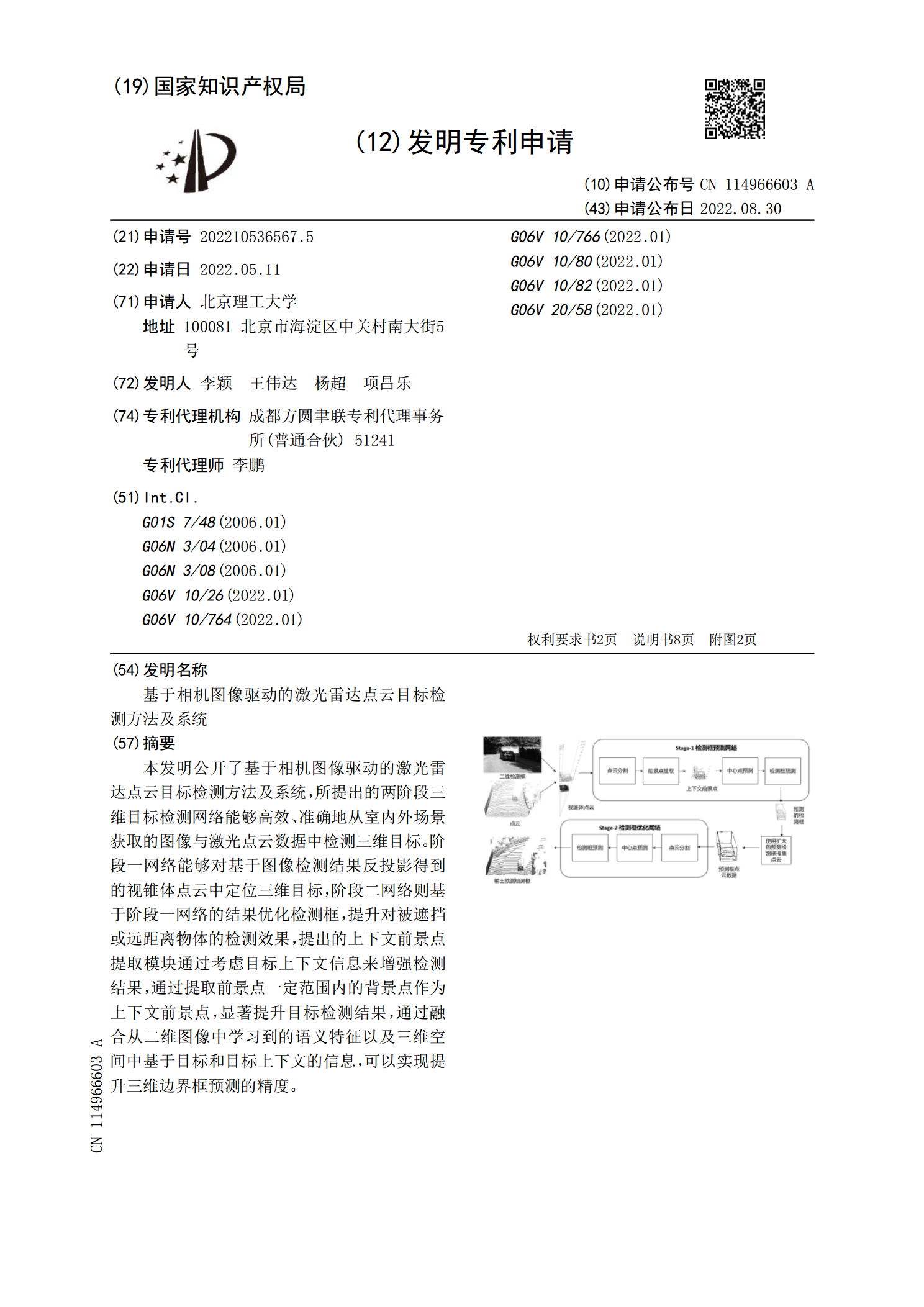
本发明公开了基于相机图像驱动的激光雷达点云目标检测方法及系统,所提出的两阶段三维目标检测网络能够高效、准确地从室内外场景获取的图像与激光点云数据中检测三维目标。阶段一网络能够对基于图像检测结果反投影得到的视锥体点云中定位三维目标,阶段二网络则基于阶段一网络的结果优化检测框,提升对被遮挡或远距离物体的检测效果,提出的上下文前景点提取模块通过考虑目标上下文信息来增强检测结果,通过提取前景点一定范围内的背景点作为上下文前景点,显著提升目标检测结果,通过融合从二维图像中学习到的语义特征以及三维空间中基于目标和目标

一种基于固态激光雷达点云生成深度图的方法.pdf
本发明公开了一种基于固态激光雷达点云生成深度图的方法,包括以下步骤:获取点云信息;生成粗糙深度图Range_Image和深度点集Range_Points;生成细化深度图Range_Image。上述技术方案根据距离视角中心的视角距离而非欧式距离来选择点,更符合几何意义,使得选取的点更精准,对于深度图丢失信息的坐标,综合考虑了该坐标竖直和水平方向上一定范围内点的强度和距离变化,使得利用周围信息补充该坐标信息的同时,最大可能保留边缘信息,使得生成的图像更加平滑和自然,以适配固态激光雷达,实现有效感知。