
一种基于深度学习的激光点云目标检测识别装置及方法.pdf

努力****采萍


1/9

2/9

3/9
4/9

5/9

6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于深度学习的激光点云目标检测识别装置及方法.pdf
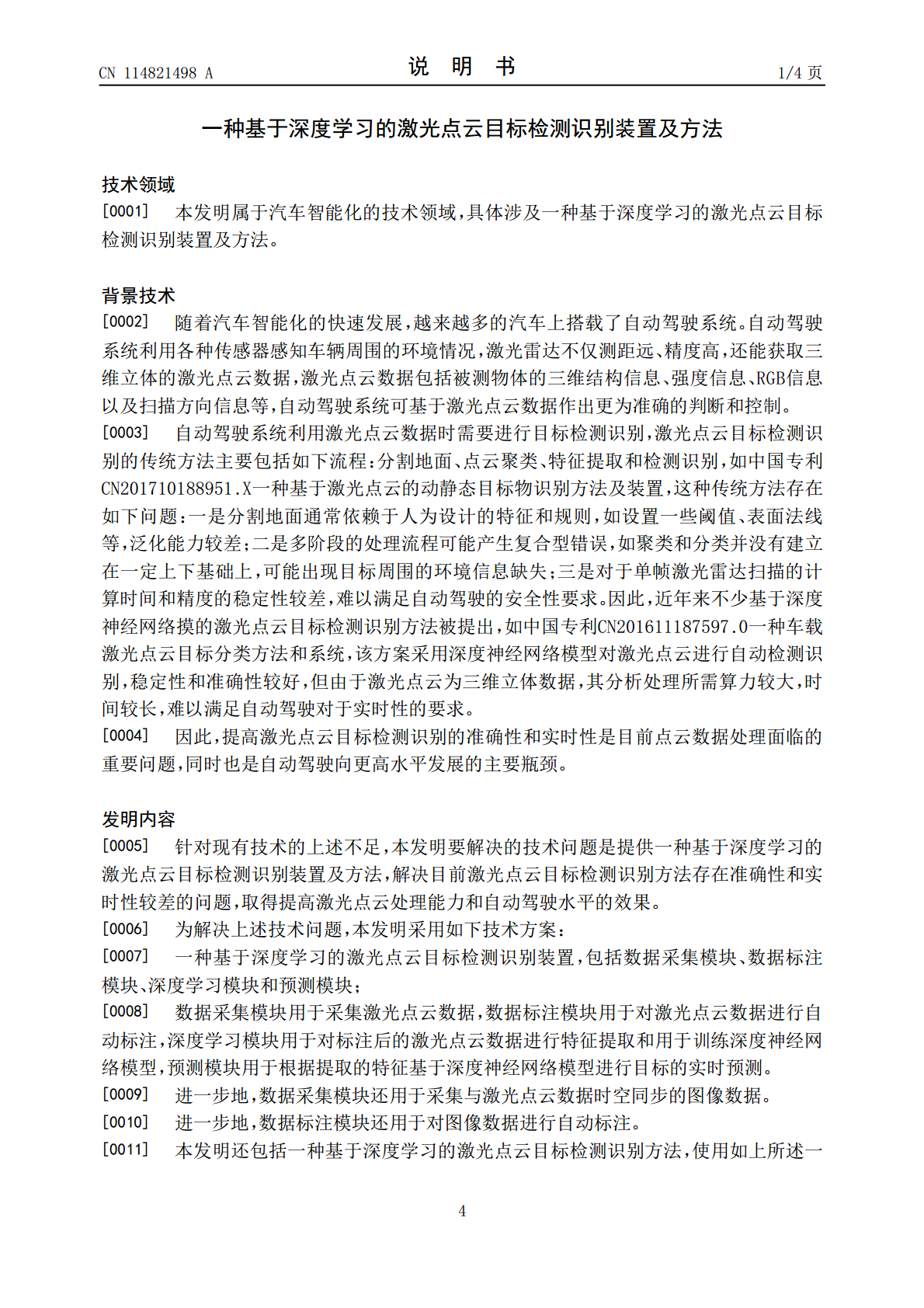
本发明涉及一种基于深度学习的激光点云目标检测识别装置及方法,方法包括如下步骤:1)数据采集模块采集激光点云数据;2)数据标注模块对激光点云数据进行自动标注;3)深度学习模块对标注后的激光点云数据进行特征提取;4)预测模块根据提取的特征基于深度神经网络模型进行目标的实时预测。本发明所述一种基于深度学习的激光点云目标检测识别方法中,先对单帧点云数据进行特征提取,然后将提取的特征进行稀疏化处理,转化为可以供RPN卷积神经网络计算的数据结构,将用于图像领域的卷积神经网络移植到三维的激光点云领域,从而提高对激光点云
一种基于深度学习的激光雷达点云目标检测方法.pdf
本发明涉及一种基于深度学习的激光雷达点云目标检测方法,包括如下步骤:收集激光雷达采集的雷达点云数据;将雷达点云划分为w*h*m个立方体,其中在xy平面上划分为w*h个网格;对任一网格采样N个点,得到采样点云;对采样点云的每个采样点的属性进行扩展得到张量矩阵;将所述张量矩阵送入神经元数量为C的全连接层后接relu层激活,将所述采样点云编码为(C,h,w)的伪图像;利用Backbone对伪图像进行目标检测。本发明由于对点云进行了有效的编码,计算量更小,检测速度快;Backbone输出的特征融合了高分辨率特征图

一种基于深度学习的三维点云特征识别装置及方法.pdf
本发明涉及识别装置技术领域,具体为一种基于深度学习的三维点云特征识别装置及方法,包括装置壳体,所述装置壳体的内部安装有升降电机,且升降电机的输出端连接有涡杆,所述涡杆的左右两侧均设有涡轮,且涡轮的内部穿设有传动轴,所述传动轴的前后两端均连接有固定架;传动杆,其设置在所述传动轴的输出端,所述升降杆的外部套设有支撑杆。本发明通过设置的涡杆和涡轮传动结构,转动的涡轮能够通过传动轴带动传动杆进行转动,从而带动升降杆在支撑杆的内部进行升降移动,从而对显示器支架进行升降控制,当识别器不使用时,可将识别器收入装置壳体的

一种基于激光点云的机柜识别方法.pdf
本发明公开了一种基于激光点云的机柜识别方法,其特征在于,包括:S1、点云数据预处理,过滤去除点云信息中的干扰项;S2、点云转换生成图像,将点云信息转换成二值图像数据;S3、图像数据处理,对生成的图像进行滤波处理消除噪声;S4、机柜轮廓识别,提取处理后的图像中的轮廓点集集合,根据轮廓点集对应的凸包面积与最小外接矩形的面积比来识别机柜的轮廓。能够直接对输入的点云建图数据进行处理,通过凸包与最小外接矩形的面积比对方法来识别检测机柜的矩形形状,不需要计算复杂的描述子和模板匹配,检测时间快,在矩形或类矩形形状的检测
一种基于激光雷达点云的车辆目标检测方法.pdf
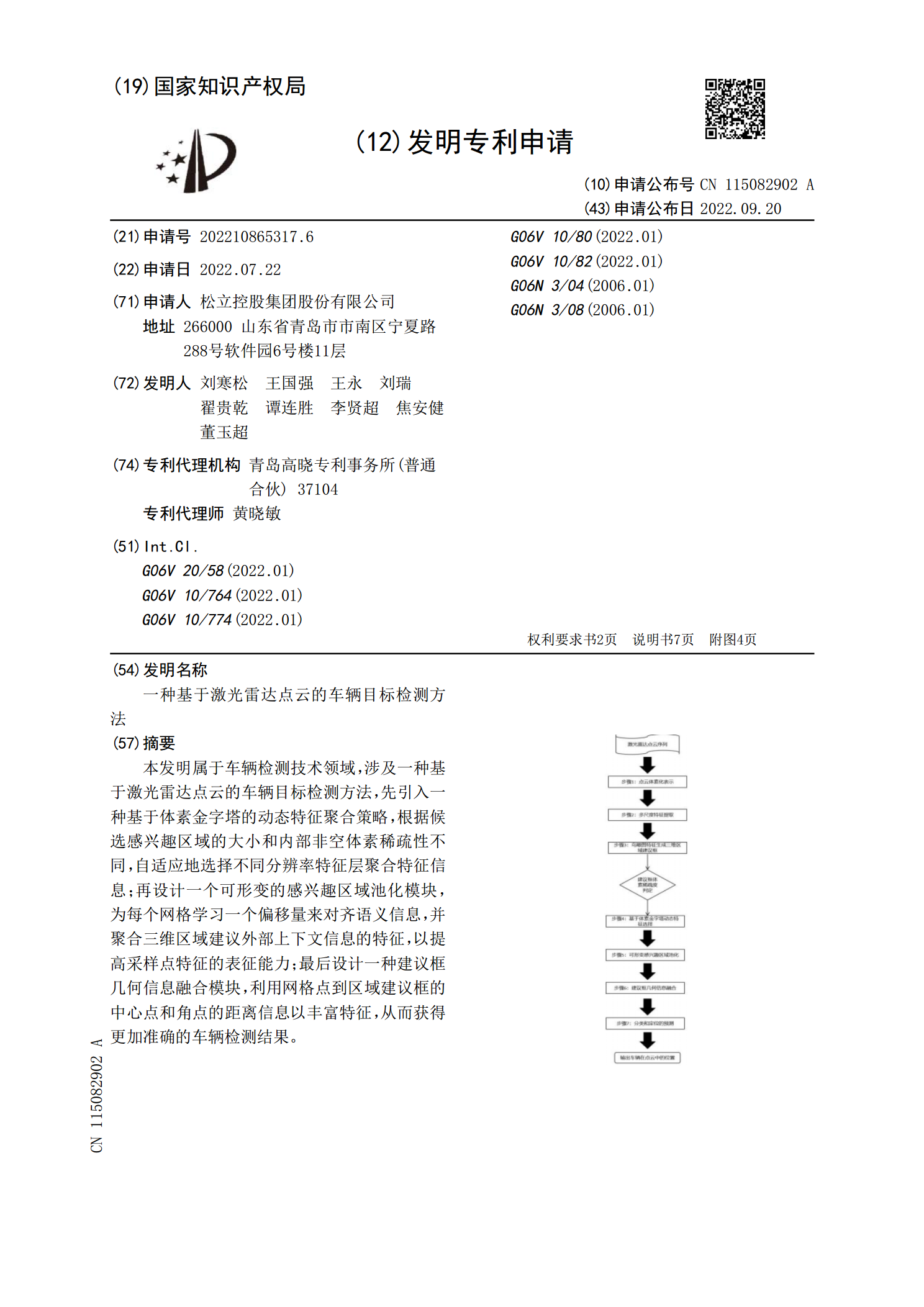
本发明属于车辆检测技术领域,涉及一种基于激光雷达点云的车辆目标检测方法,先引入一种基于体素金字塔的动态特征聚合策略,根据候选感兴趣区域的大小和内部非空体素稀疏性不同,自适应地选择不同分辨率特征层聚合特征信息;再设计一个可形变的感兴趣区域池化模块,为每个网格学习一个偏移量来对齐语义信息,并聚合三维区域建议外部上下文信息的特征,以提高采样点特征的表征能力;最后设计一种建议框几何信息融合模块,利用网格点到区域建议框的中心点和角点的距离信息以丰富特征,从而获得更加准确的车辆检测结果。