
机器人运动轨迹处理方法、装置、控制器及介质.pdf

玄静****写意

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机器人运动轨迹处理方法、装置、控制器及介质.pdf
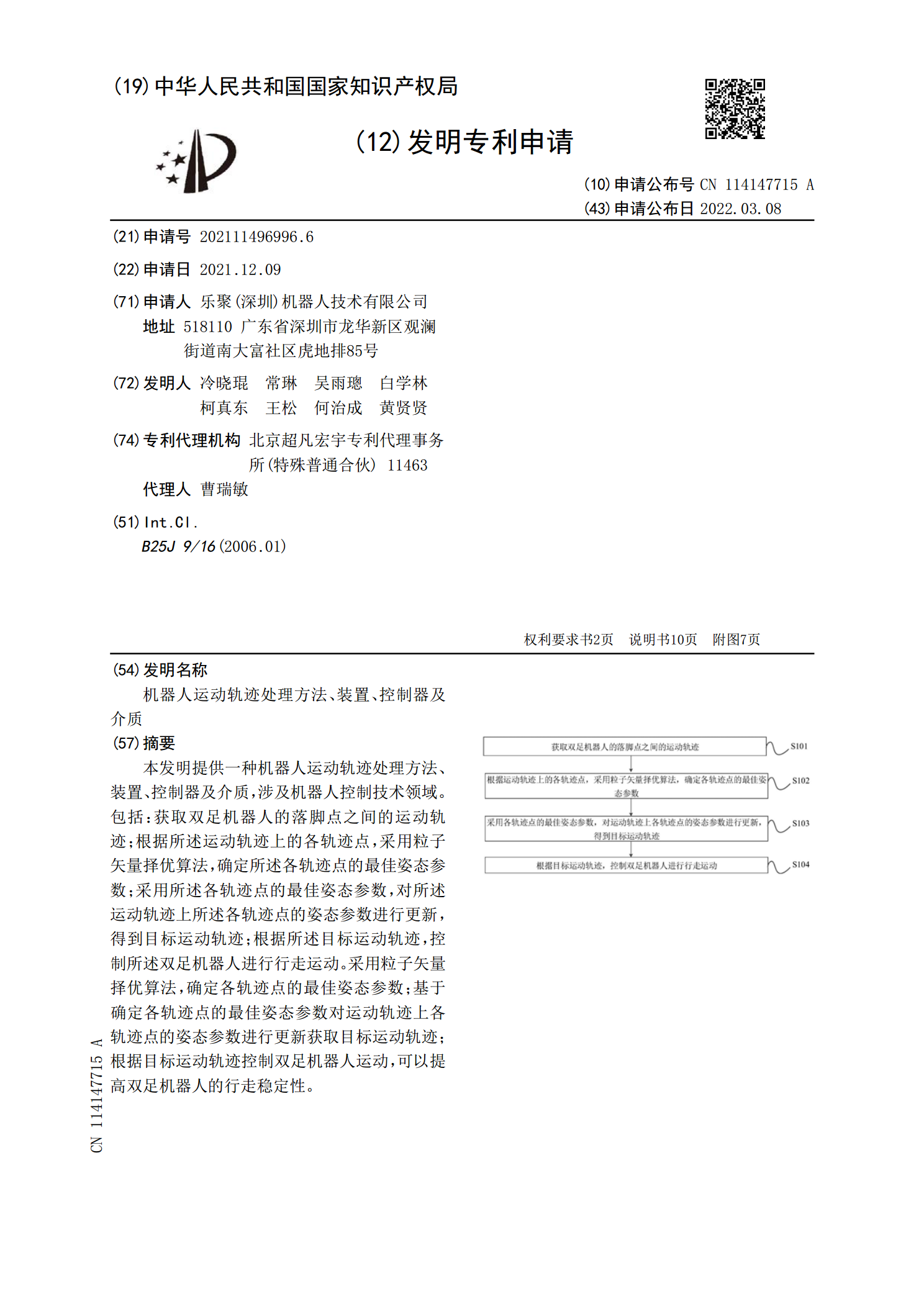
本发明提供一种机器人运动轨迹处理方法、装置、控制器及介质,涉及机器人控制技术领域。包括:获取双足机器人的落脚点之间的运动轨迹;根据所述运动轨迹上的各轨迹点,采用粒子矢量择优算法,确定所述各轨迹点的最佳姿态参数;采用所述各轨迹点的最佳姿态参数,对所述运动轨迹上所述各轨迹点的姿态参数进行更新,得到目标运动轨迹;根据所述目标运动轨迹,控制所述双足机器人进行行走运动。采用粒子矢量择优算法,确定各轨迹点的最佳姿态参数;基于确定各轨迹点的最佳姿态参数对运动轨迹上各轨迹点的姿态参数进行更新获取目标运动轨迹;根据目标运动
机器人运动轨迹估计方法、装置、控制器及存储介质.pdf
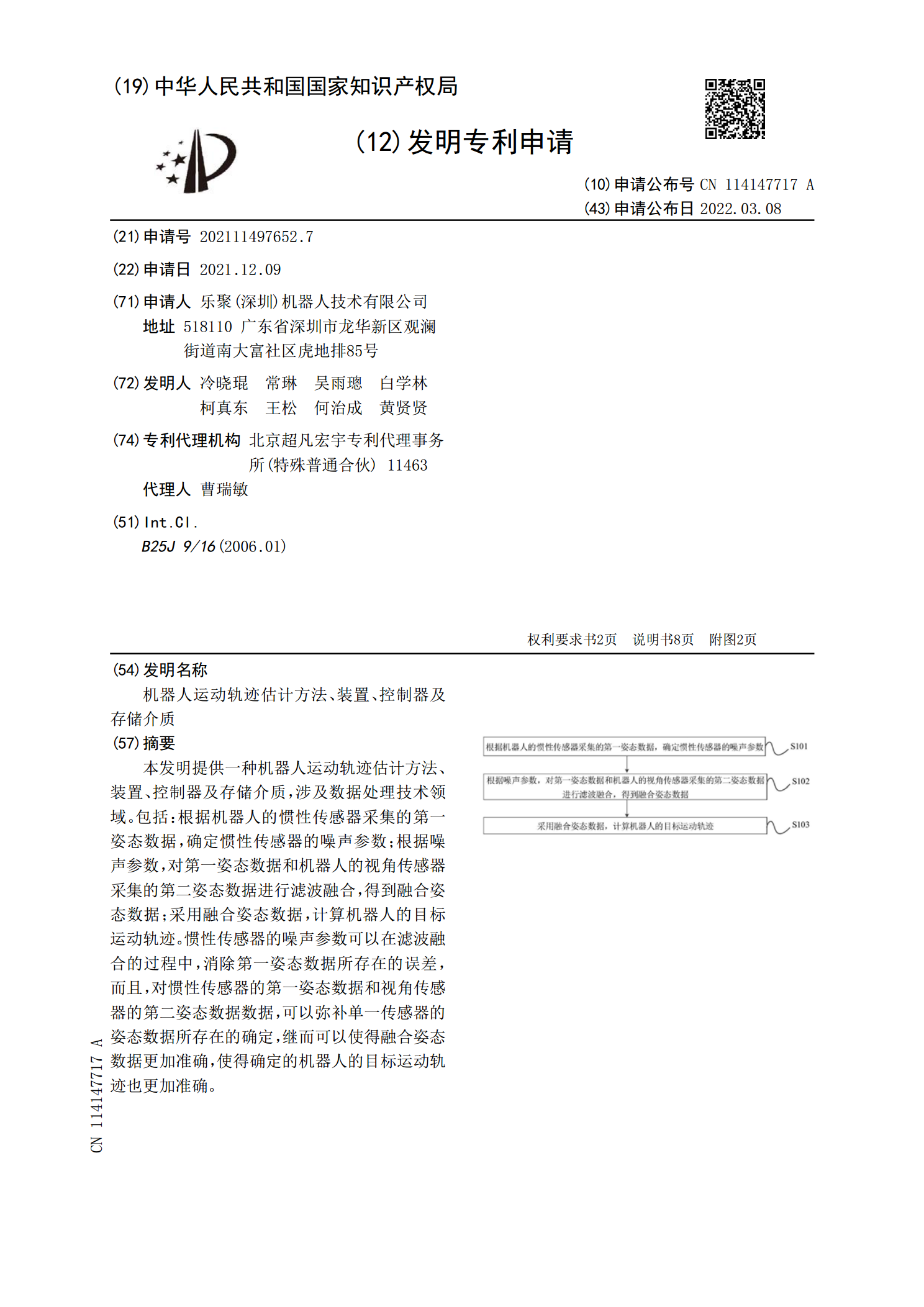
本发明提供一种机器人运动轨迹估计方法、装置、控制器及存储介质,涉及数据处理技术领域。包括:根据机器人的惯性传感器采集的第一姿态数据,确定惯性传感器的噪声参数;根据噪声参数,对第一姿态数据和机器人的视角传感器采集的第二姿态数据进行滤波融合,得到融合姿态数据;采用融合姿态数据,计算机器人的目标运动轨迹。惯性传感器的噪声参数可以在滤波融合的过程中,消除第一姿态数据所存在的误差,而且,对惯性传感器的第一姿态数据和视角传感器的第二姿态数据数据,可以弥补单一传感器的姿态数据所存在的确定,继而可以使得融合姿态数据更加准
双足机器人的运动轨迹规划方法、装置、设备及介质.pdf
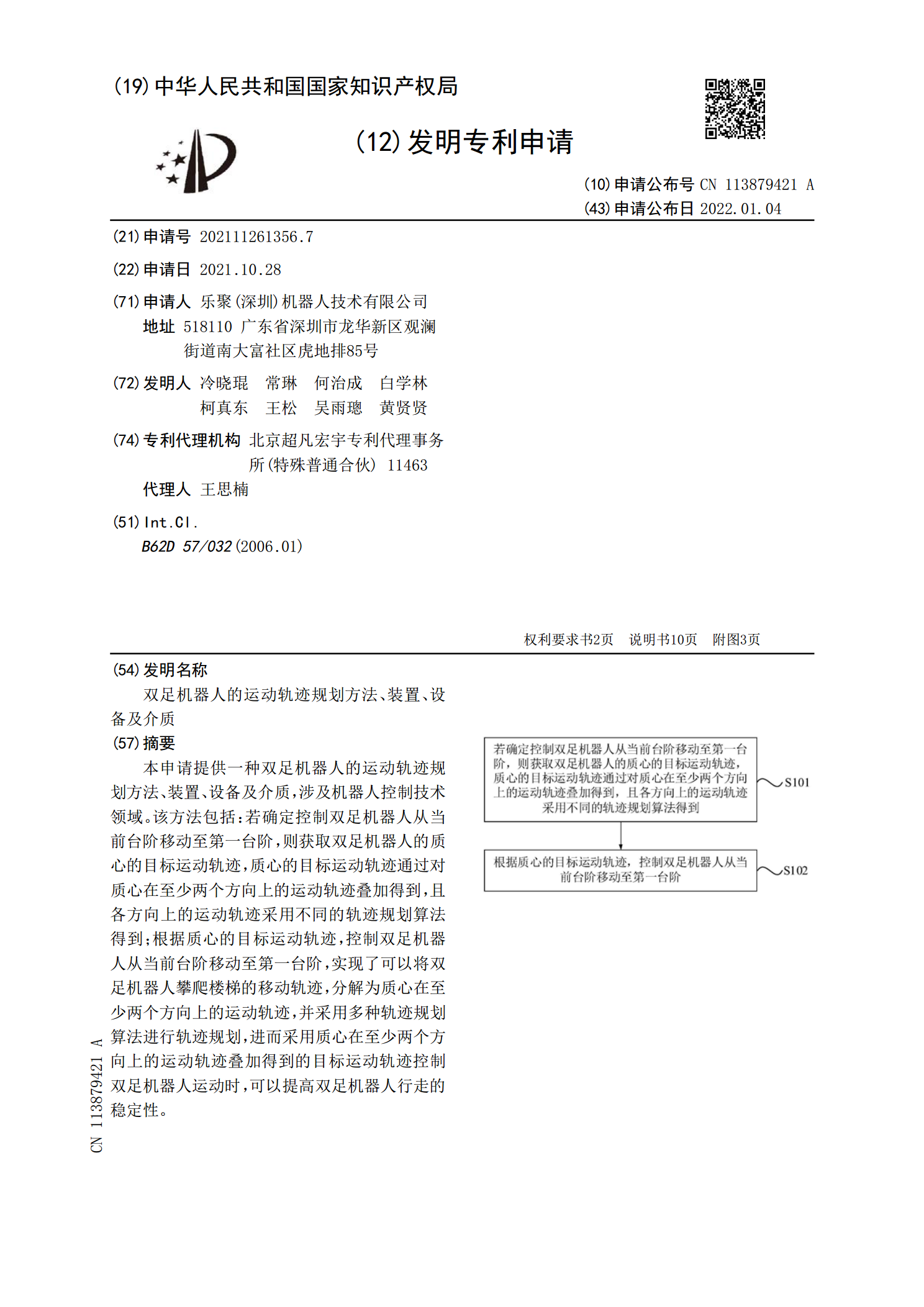
本申请提供一种双足机器人的运动轨迹规划方法、装置、设备及介质,涉及机器人控制技术领域。该方法包括:若确定控制双足机器人从当前台阶移动至第一台阶,则获取双足机器人的质心的目标运动轨迹,质心的目标运动轨迹通过对质心在至少两个方向上的运动轨迹叠加得到,且各方向上的运动轨迹采用不同的轨迹规划算法得到;根据质心的目标运动轨迹,控制双足机器人从当前台阶移动至第一台阶,实现了可以将双足机器人攀爬楼梯的移动轨迹,分解为质心在至少两个方向上的运动轨迹,并采用多种轨迹规划算法进行轨迹规划,进而采用质心在至少两个方向上的运动轨
机器人运动控制方法、装置、控制器及存储介质.pdf
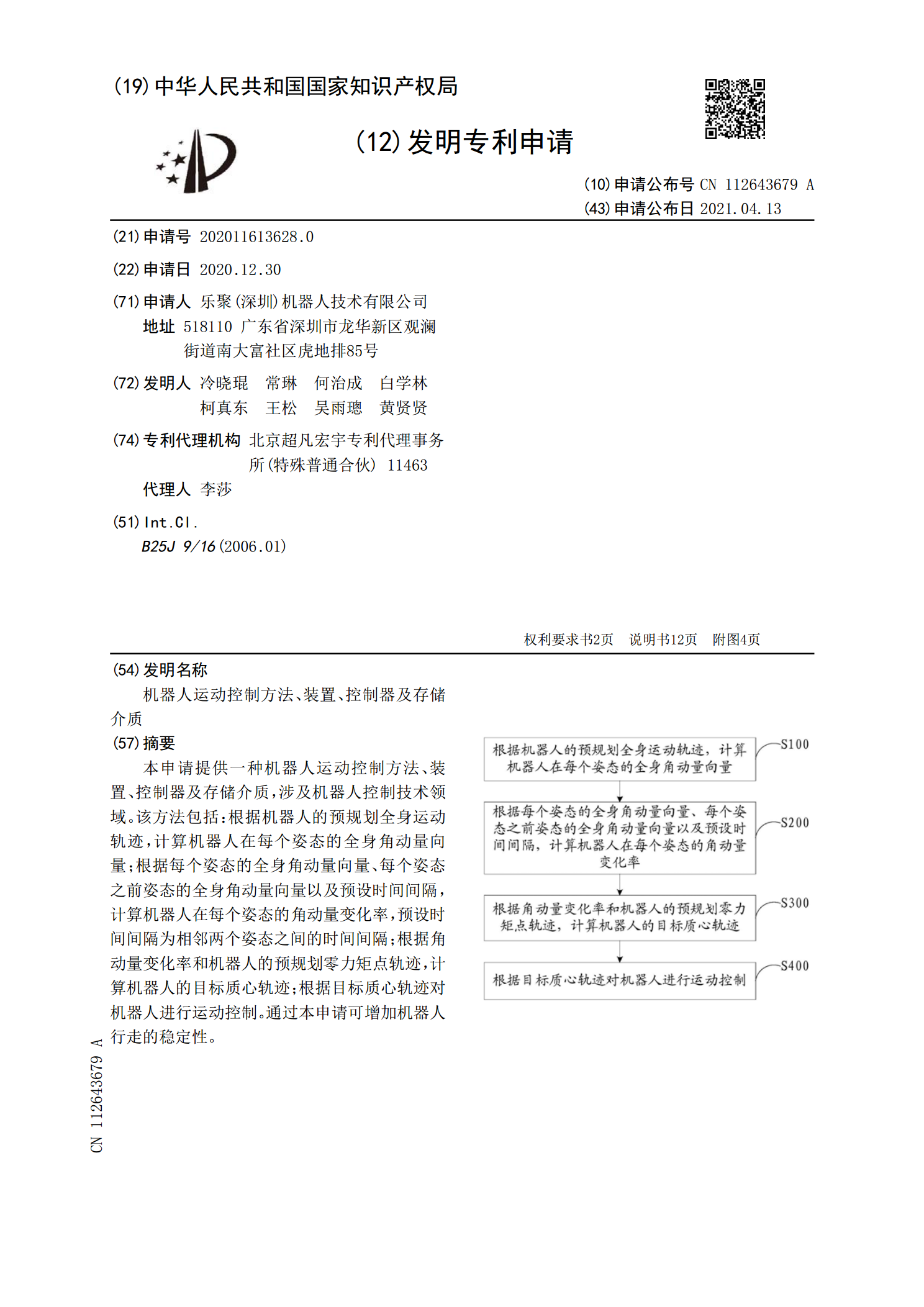
本申请提供一种机器人运动控制方法、装置、控制器及存储介质,涉及机器人控制技术领域。该方法包括:根据机器人的预规划全身运动轨迹,计算机器人在每个姿态的全身角动量向量;根据每个姿态的全身角动量向量、每个姿态之前姿态的全身角动量向量以及预设时间间隔,计算机器人在每个姿态的角动量变化率,预设时间间隔为相邻两个姿态之间的时间间隔;根据角动量变化率和机器人的预规划零力矩点轨迹,计算机器人的目标质心轨迹;根据目标质心轨迹对机器人进行运动控制。通过本申请可增加机器人行走的稳定性。
机器人运动保护方法、装置、控制器及存储介质.pdf
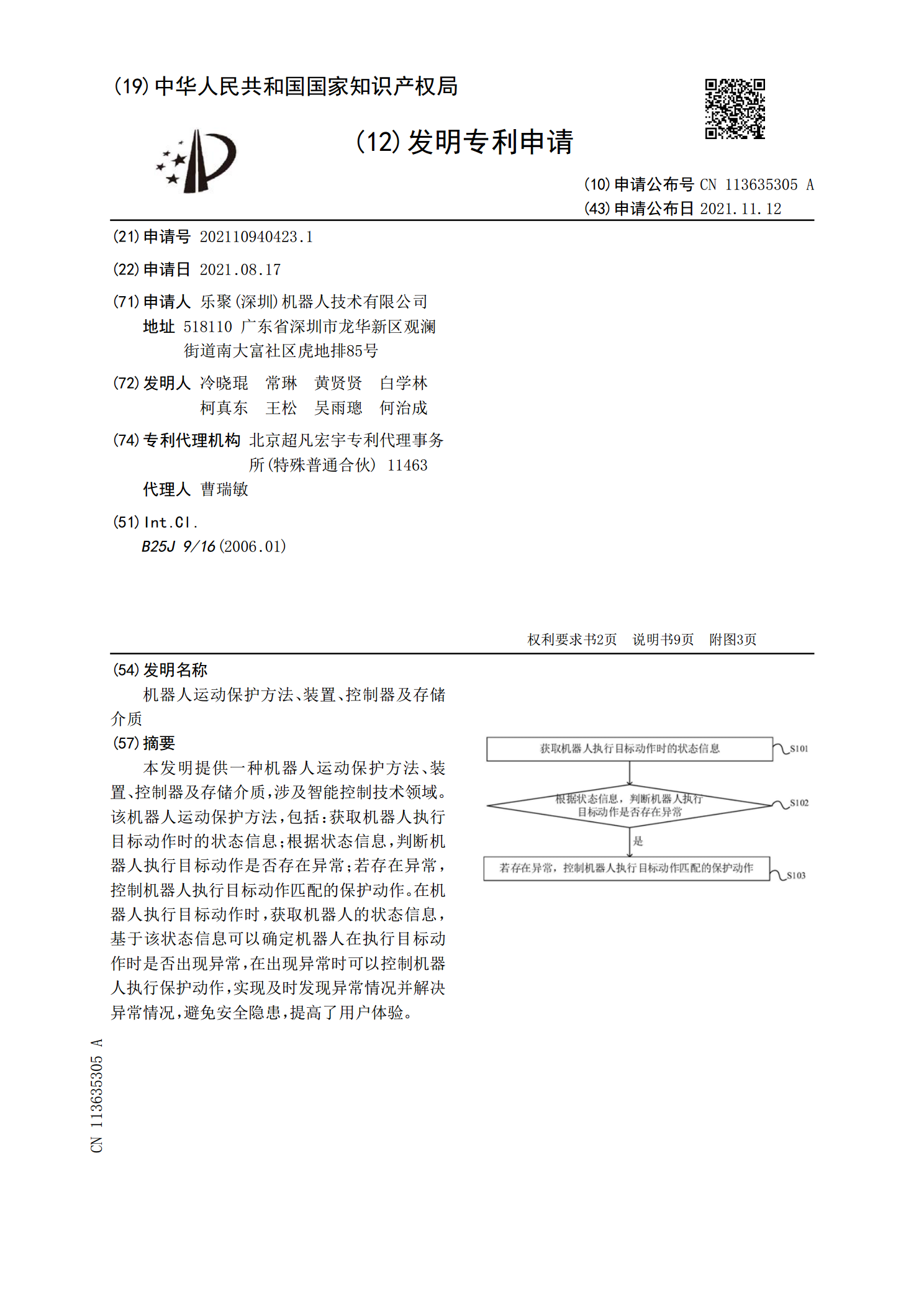
本发明提供一种机器人运动保护方法、装置、控制器及存储介质,涉及智能控制技术领域。该机器人运动保护方法,包括:获取机器人执行目标动作时的状态信息;根据状态信息,判断机器人执行目标动作是否存在异常;若存在异常,控制机器人执行目标动作匹配的保护动作。在机器人执行目标动作时,获取机器人的状态信息,基于该状态信息可以确定机器人在执行目标动作时是否出现异常,在出现异常时可以控制机器人执行保护动作,实现及时发现异常情况并解决异常情况,避免安全隐患,提高了用户体验。