
手术导航方法及装置、电子设备、存储介质.pdf

一条****彩妍


1/10
2/10
3/10
4/10
5/10
6/10
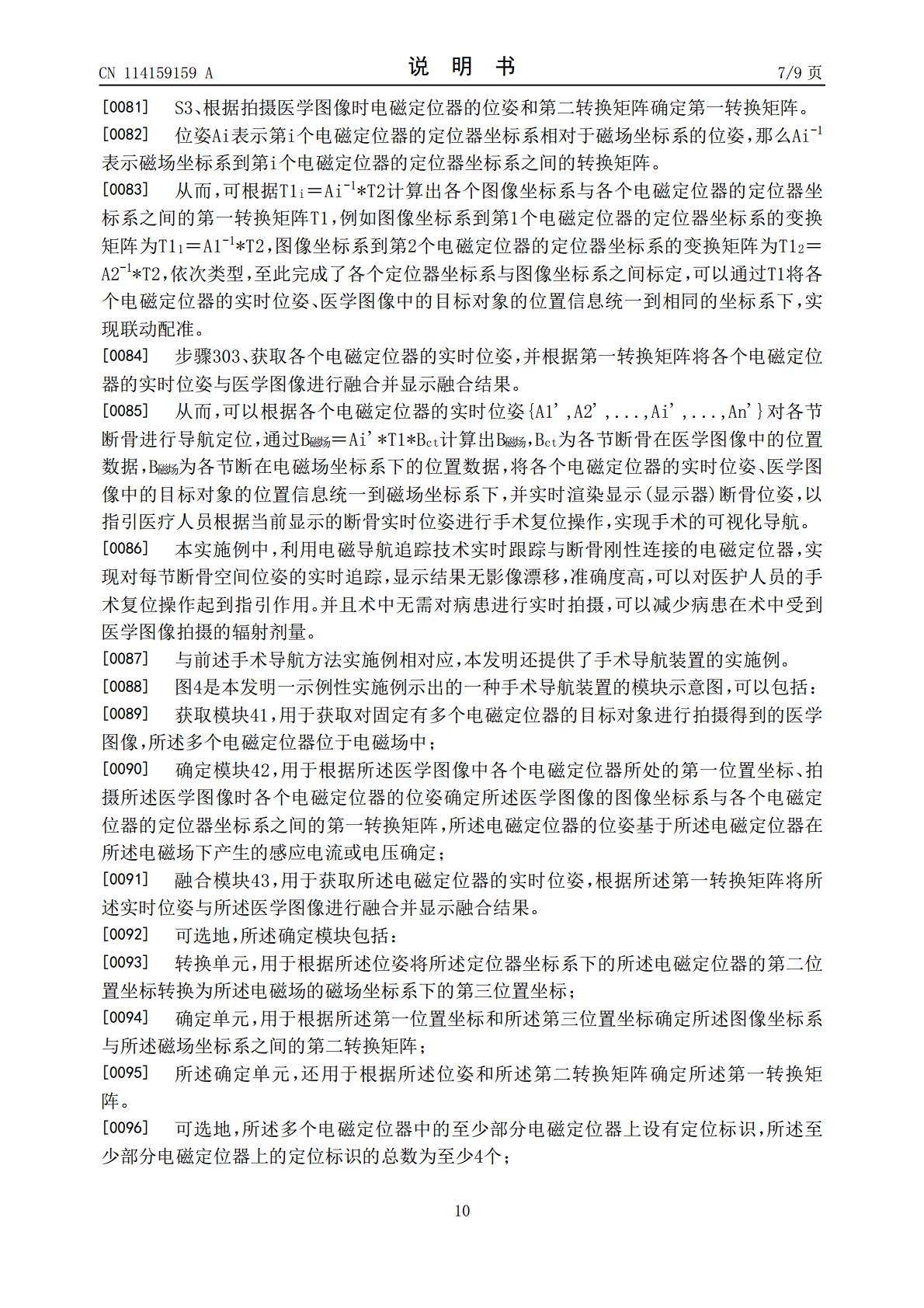
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
手术导航方法、装置、电子设备、存储介质.pdf
本发明公开了手术导航方法、装置、电子设备、存储介质。方法包括:获取拍摄设备对目标对象进行拍摄得到的二维医学图像,目标对象上固定有第一电磁定位组件,第一电磁定位组件位于电磁场中;获取目标对象的三维医学图像;根据二维医学图像中第一电磁定位组件所处的位置坐标、拍摄二维医学图像时第一电磁定位组件的第一位姿以及三维医学图像确定三维医学图像的图像坐标系与电磁场的磁场坐标系之间的第一转换关系;根据第一转换关系分别将第一电磁定位组件的实时位姿和固定于手术器械上的第二电磁定位组件的实时位姿转换为图像坐标系下的空间坐标,以引
手术导航方法及装置、电子设备、存储介质.pdf
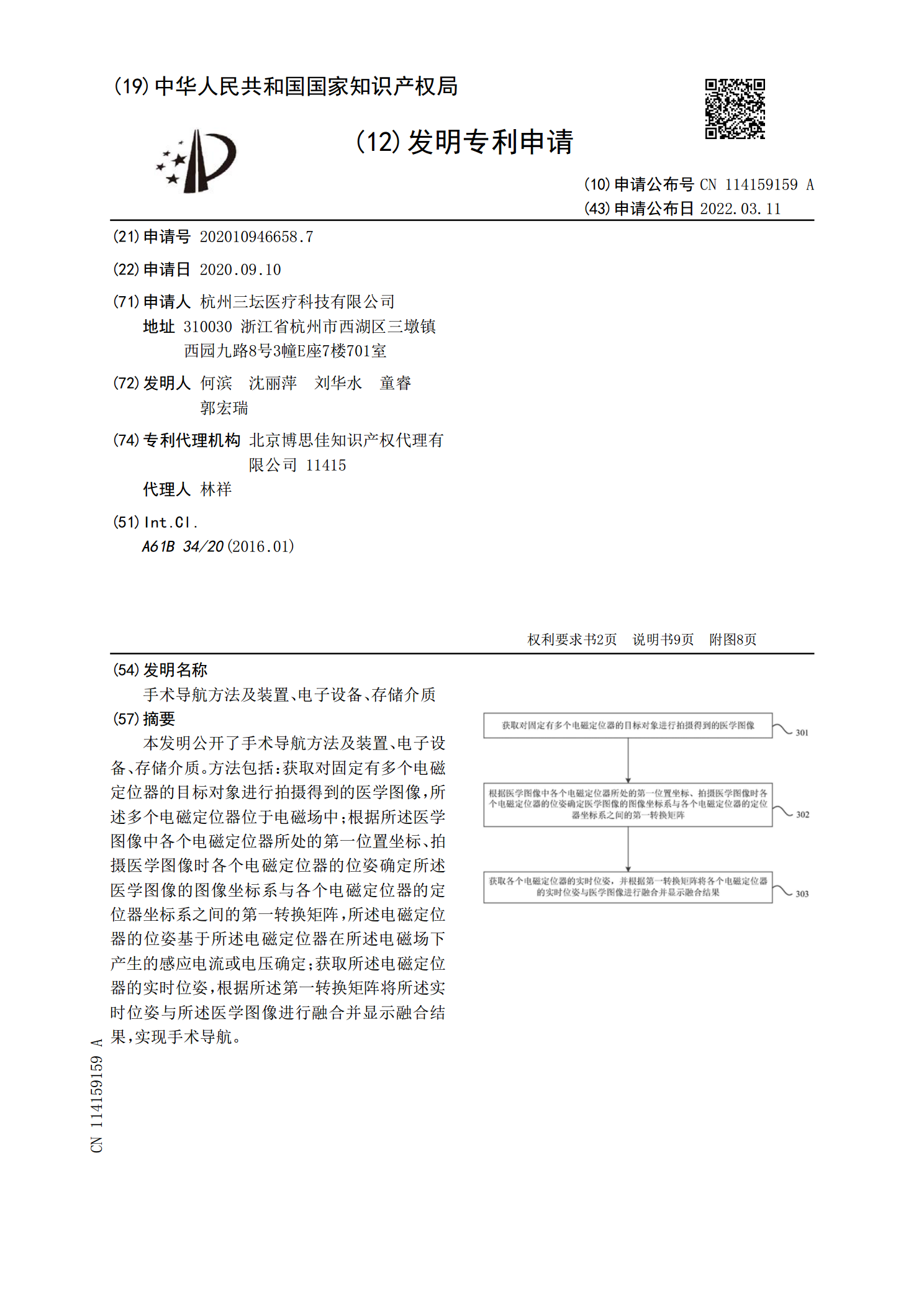
本发明公开了手术导航方法及装置、电子设备、存储介质。方法包括:获取对固定有多个电磁定位器的目标对象进行拍摄得到的医学图像,所述多个电磁定位器位于电磁场中;根据所述医学图像中各个电磁定位器所处的第一位置坐标、拍摄医学图像时各个电磁定位器的位姿确定所述医学图像的图像坐标系与各个电磁定位器的定位器坐标系之间的第一转换矩阵,所述电磁定位器的位姿基于所述电磁定位器在所述电磁场下产生的感应电流或电压确定;获取所述电磁定位器的实时位姿,根据所述第一转换矩阵将所述实时位姿与所述医学图像进行融合并显示融合结果,实现手术导航
手术导航方法、装置、电子设备及存储介质.pdf
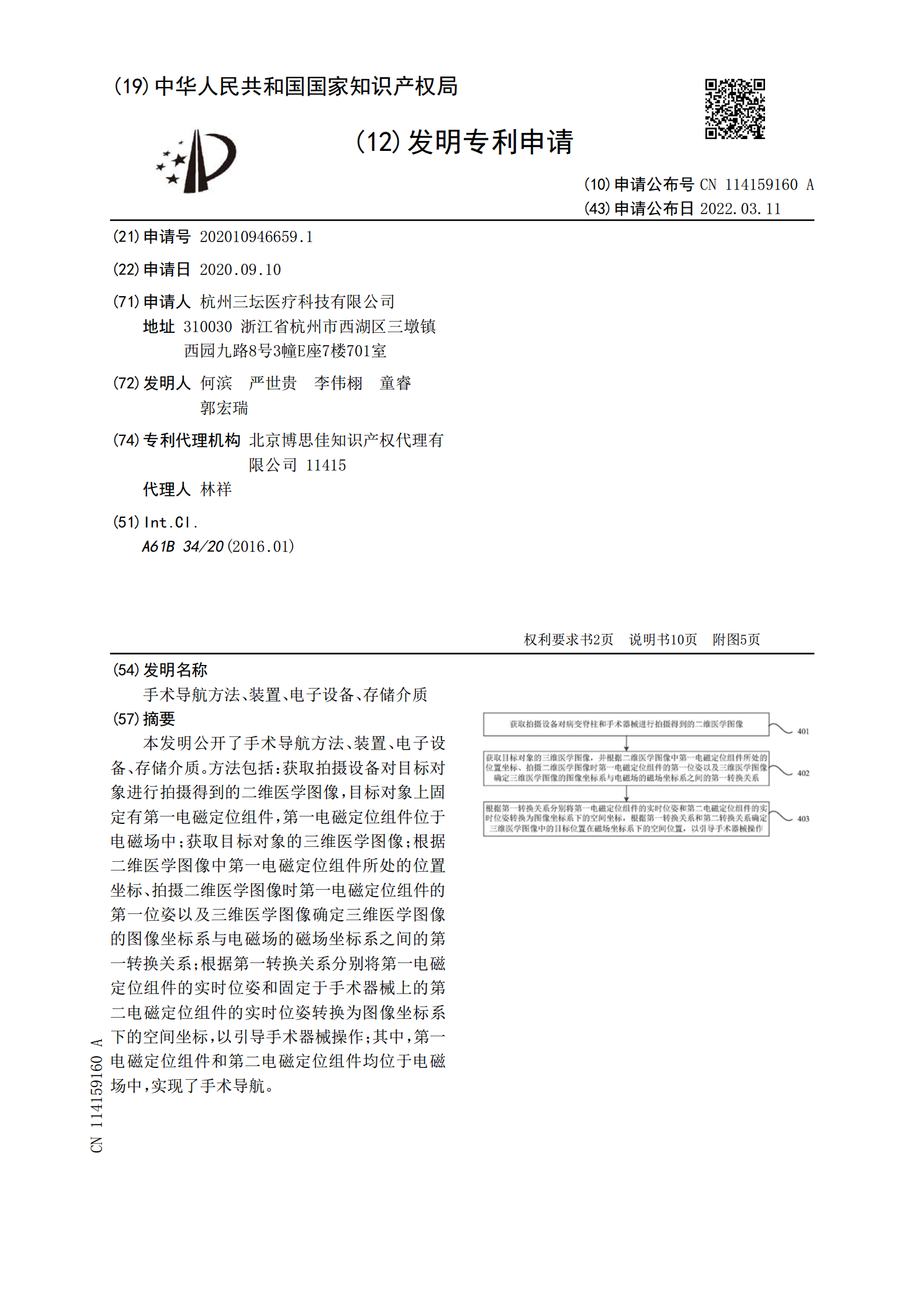
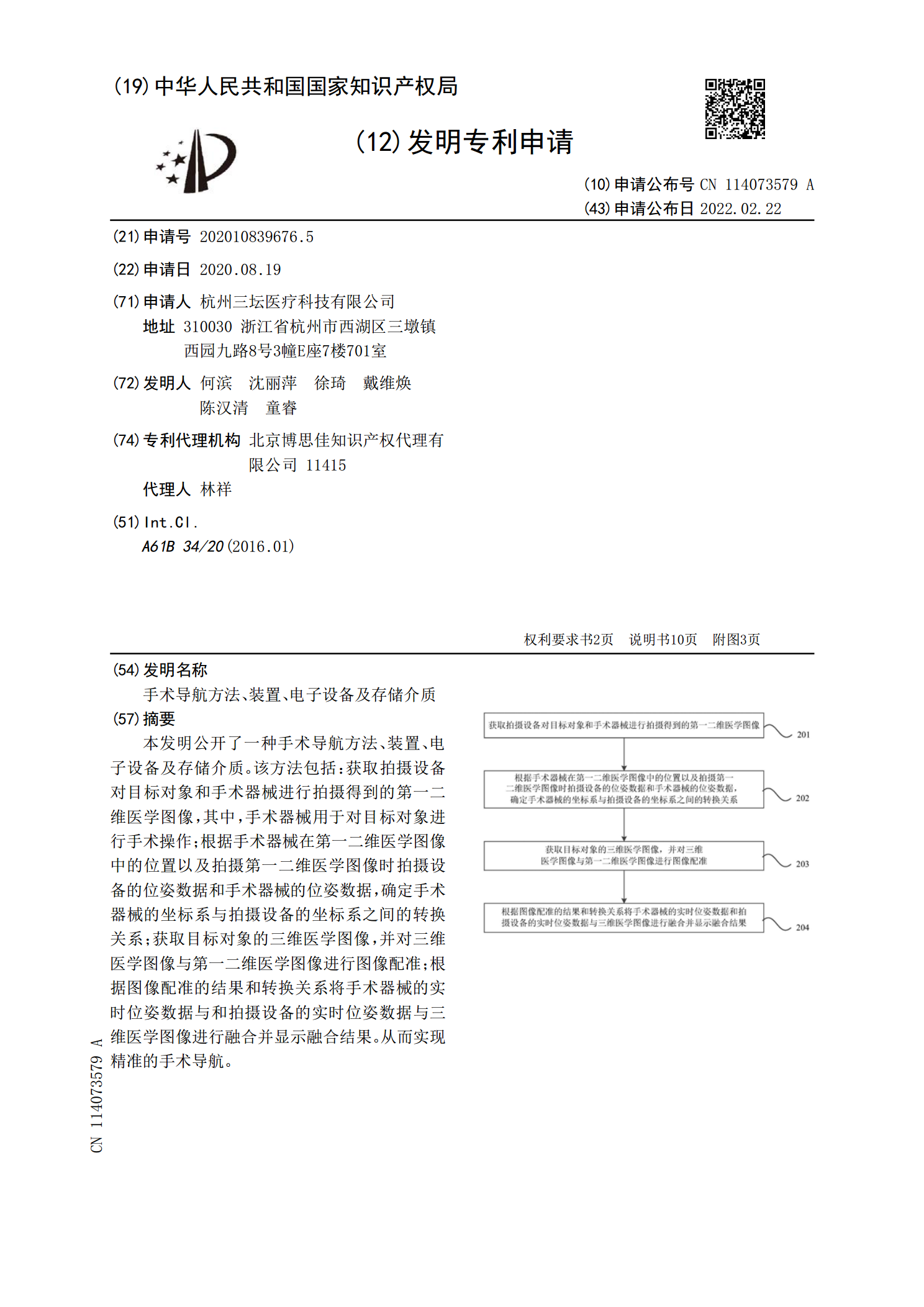
本发明公开了一种手术导航方法、装置、电子设备及存储介质。该方法包括:获取拍摄设备对目标对象和手术器械进行拍摄得到的第一二维医学图像,其中,手术器械用于对目标对象进行手术操作;根据手术器械在第一二维医学图像中的位置以及拍摄第一二维医学图像时拍摄设备的位姿数据和手术器械的位姿数据,确定手术器械的坐标系与拍摄设备的坐标系之间的转换关系;获取目标对象的三维医学图像,并对三维医学图像与第一二维医学图像进行图像配准;根据图像配准的结果和转换关系将手术器械的实时位姿数据与和拍摄设备的实时位姿数据与三维医学图像进行融合并
导航方法、导航装置、电子设备和存储介质.pdf
本申请公开了导航方法、导航装置、电子设备和存储介质,涉及智能导航领域。具体实现方案为:向移动终端发送导航请求,导航请求中包括车机端的导航需求信息,以使移动终端根据已知的车机端中至少一个目标图层对应的数据格式,将导航需求信息转化为车机端导航数据;接收移动终端发送的车机端导航数据,并将车机端导航数据渲染至对应的目标图层。本申请公开的技术方案可以在启动导航时,获取移动终端发送的与目标图层的数据格式对应的在线导航数据,并渲染至对应的目标图层,进而实现车机端的在线导航。
导航方法、导航装置、电子设备和存储介质.pdf
本申请公开了导航方法、导航装置、电子设备和存储介质,涉及智能导航领域。具体实现方案为:向移动终端发送导航请求,导航请求中包括车机端的导航需求信息,以使移动终端根据已知的车机端中至少一个目标图层对应的数据格式,将导航需求信息转化为车机端导航数据;接收移动终端发送的车机端导航数据,并将车机端导航数据渲染至对应的目标图层。本申请公开的技术方案可以在启动导航时,获取移动终端发送的与目标图层的数据格式对应的在线导航数据,并渲染至对应的目标图层,进而实现车机端的在线导航。