
一种基于线性自抗扰的移动机器人速度解耦抗扰控制器.pdf

猫巷****忠娟

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于线性自抗扰的移动机器人速度解耦抗扰控制器.pdf
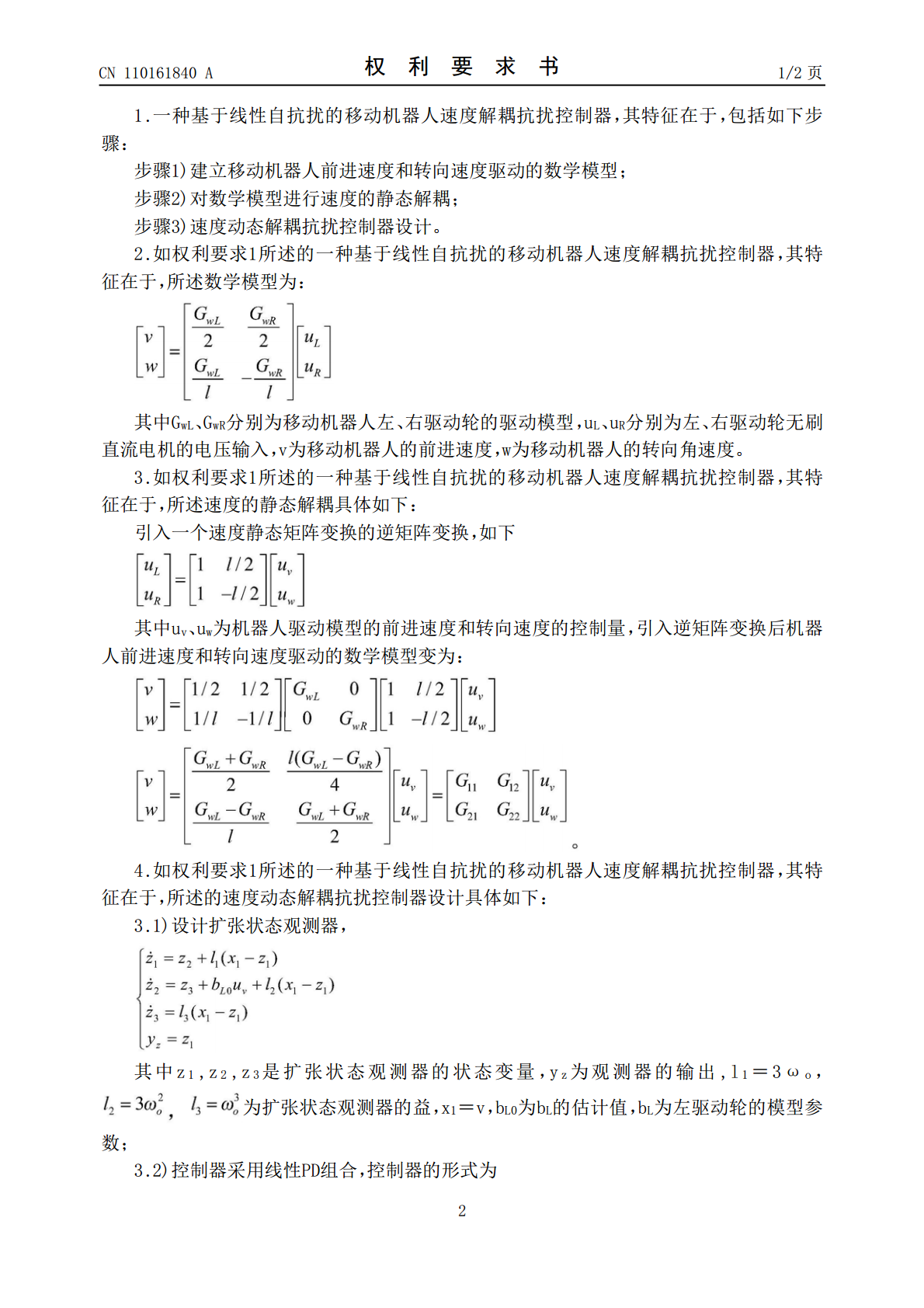
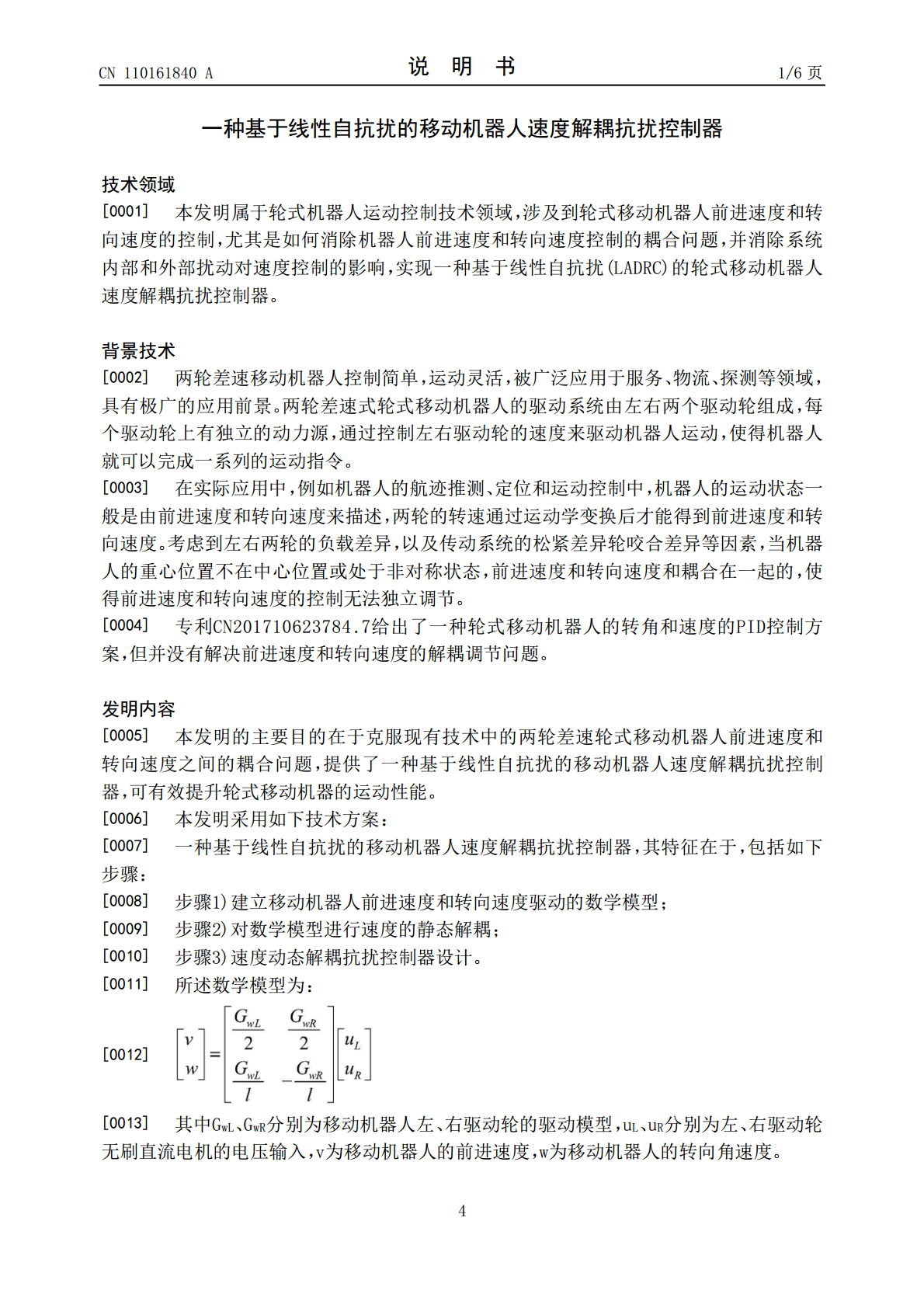
一种基于线性自抗扰的移动机器人速度解耦抗扰控制器,其特征在于,包括如下步骤:步骤1)建立移动机器人前进速度和转向速度驱动的数学模型;步骤2)对数学模型进行速度的静态解耦;步骤3)速度动态解耦抗扰控制器设计。本发明可有效提升轮式移动机器的运动性能。

基于自抗扰的三电机同步系统无速度解耦控制的任务书.docx
基于自抗扰的三电机同步系统无速度解耦控制的任务书一、课题背景与意义在工业生产中,三电机同步系统是一种常见的控制对象。常见的三电机同步系统包括水泵、风机、压缩机等。这些系统一般由三相异步电动机和矢量控制器组成,用于控制电机的转速和电流。在三电机同步系统中,不同电机之间的转速耦合常常会导致系统的振荡和不稳定。因此,研究如何解决这个问题对于保证系统的正常运行非常重要。自抗扰控制技术是一种新兴的控制方法,它通过自适应控制方式来抵消系统受到的外部扰动,从而达到控制系统的稳定性。自抗扰控制技术被认为是一种非常有效的控

系统线性自抗扰控制器频带特性与参数配置研究.docx
系统线性自抗扰控制器频带特性与参数配置研究一、概述随着现代工业技术的快速发展,控制系统在各个领域的应用日益广泛,对控制系统的性能要求也越来越高。系统线性自抗扰控制器(LinearActiveDisturbanceRejectionController,简称LADRC)作为一种新型的控制策略,以其优良的抗扰性能和鲁棒性受到了广泛关注。本文旨在深入研究LADRC的频带特性与参数配置,为控制系统的优化设计和实际应用提供理论支持和实践指导。LADRC是在传统PID控制的基础上,结合现代控制理论中的状态观测器和扰动

一种基于高通滤波线性反馈控制器优化的自抗扰控制方法.pdf
本发明涉及电机控制技术领域,具体的是一种基于高通滤波线性反馈控制器优化的自抗扰控制方法,包括以下步骤:S1、基于电机运动方程得到状态空间方程,将电机驱动系统中的总扰动扩展为新的状态变量,根据新的状态变量构建新的状态空间方程;S2、由新的状态空间方程构建扩张状态观测器,利用观测器观测出的转速反馈值和总扰动,利用总扰动进行前馈补偿;S3、设计高通滤波器、线性反馈控制器实现转速参考信号跟踪,抑制由于电机驱动系统内部扰动造成的转速周期性波动。本发明保留了线性ESO的整定参数较少的特点,减小了转速波动,降低了电机低

一种基于比例谐振控制器优化的自抗扰控制方法.pdf
一种基于比例谐振控制器优化的自抗扰控制方法,它属于电机控制技术领域。本发明同时解决了传统永磁同步电机驱动系统中外部扰动和内部扰动造成转速波动的问题。本发明对线性自抗扰控制器进行改进,利用含有准谐振调节器的比例谐振控制器取代原线性自抗扰控制器中的比例控制器,不仅保留了传统线性自抗扰控制器能够有效的观测突变扰动和低频扰动并进行前馈补偿的优点,同时抑制了内部扰动造成的转速波动,实现对系统的高性能控制。相对于传统的比例积分控制器,本发明方法可以使得转速跌落减小55%以及转速波动减小到0.5转内。本发明可以应用于电