
图像处理方法、装置、电子设备以及计算机可读存储介质.pdf

一只****生物

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
图像处理方法、装置、电子设备以及计算机可读存储介质.pdf
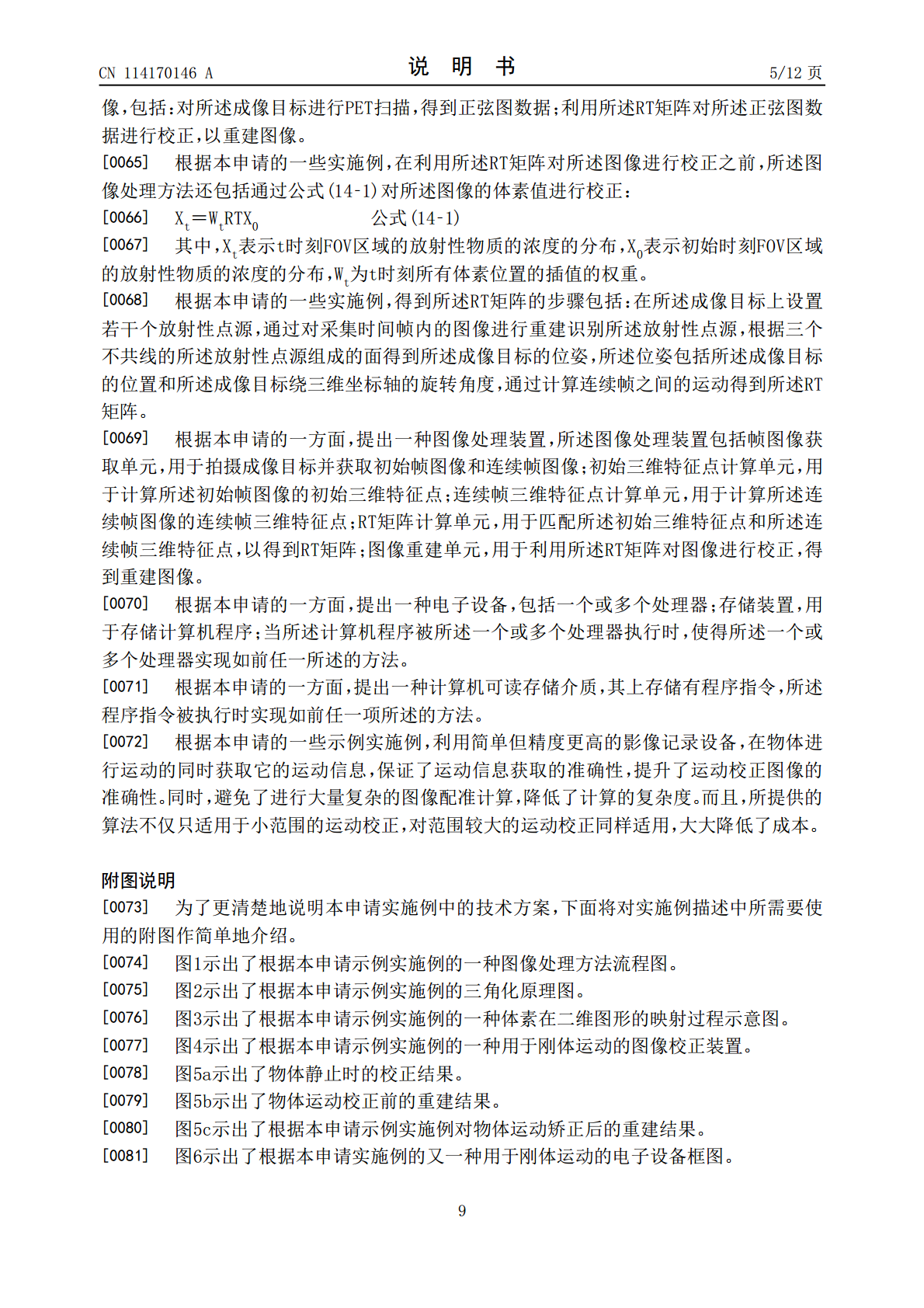
本申请提出图像处理方法、装置、电子设备以及计算机可读存储介质,所述图像校正方法包括:拍摄成像目标并获取初始帧图像和连续帧图像;计算所述初始帧图像的初始三维特征点;计算所述连续帧图像的连续帧三维特征点;匹配所述初始三维特征点和所述连续帧三维特征点,以得到RT矩阵;利用所述RT矩阵对图像进行校正,得到重建图像。根据本申请的示例实施例,通过利用简单但精度更高的影像记录设备获取物体的运动信息,提升了运动校正图像的准确性,降低了计算复杂度。
图像处理方法和装置、电子设备以及计算机可读存储介质.pdf
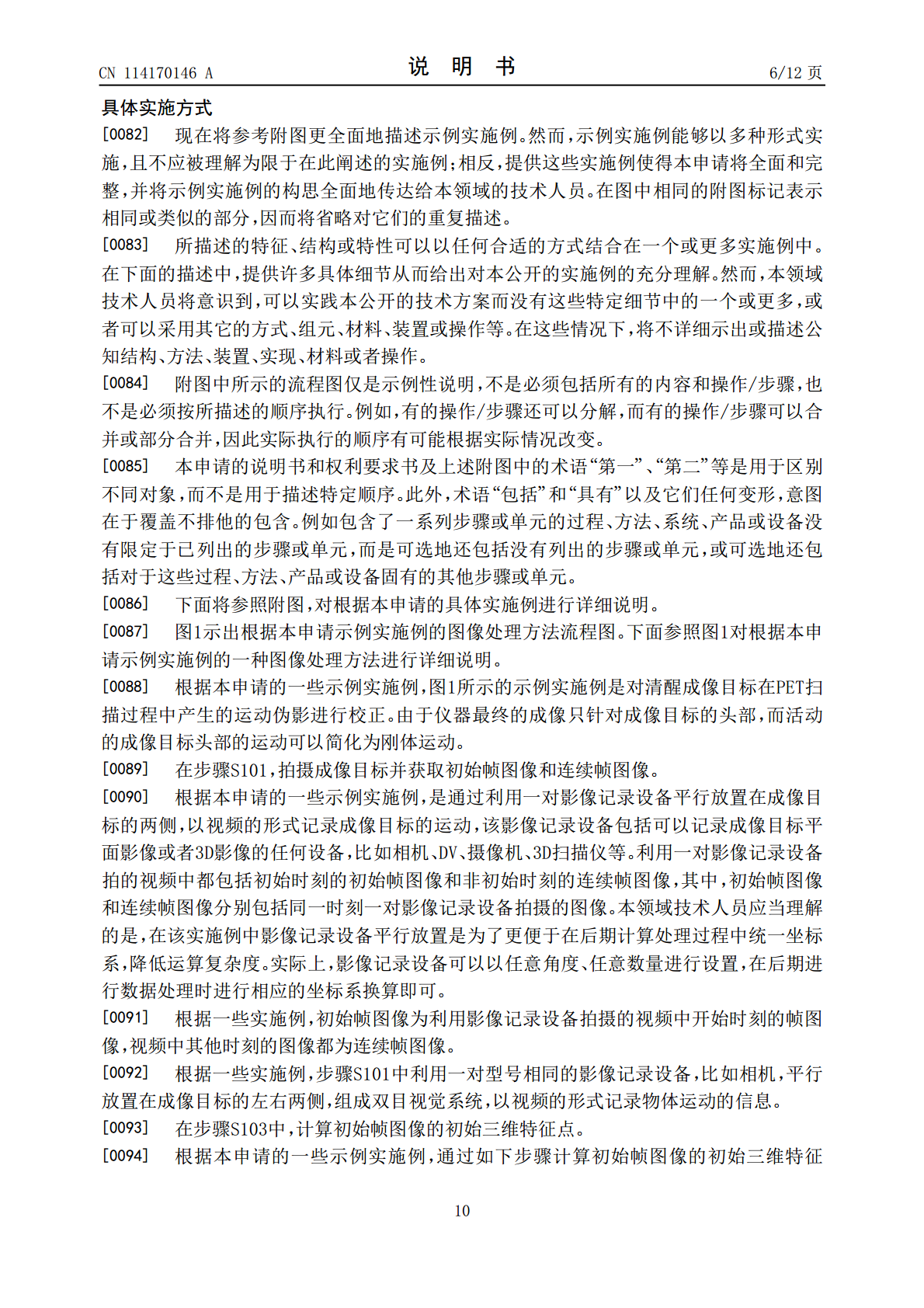
本申请实施例提供了一种图像处理方法和装置、电子设备以及计算机可读存储介质。该方法包括:根据目标区域的多个图像确定至少一个目标对象在所述目标区域中的位置信息;根据所述位置信息生成所述至少一个目标对象的轨迹信息;对各目标对象的轨迹信息进行拟合处理以生成拟合曲线;根据所述拟合曲线确定所述目标对象的行动事件。本申请实施例能够利用基于轨迹信息的拟合曲线来进行例如顾客的目标对象的行动事件的判定等处理,从而消除了现有技术中需要人工基于轨迹信息来标定辅助线的问题,大大提高了效率和判定的准确性。
图像处理方法、图像处理装置、电子设备及可读存储介质.pdf
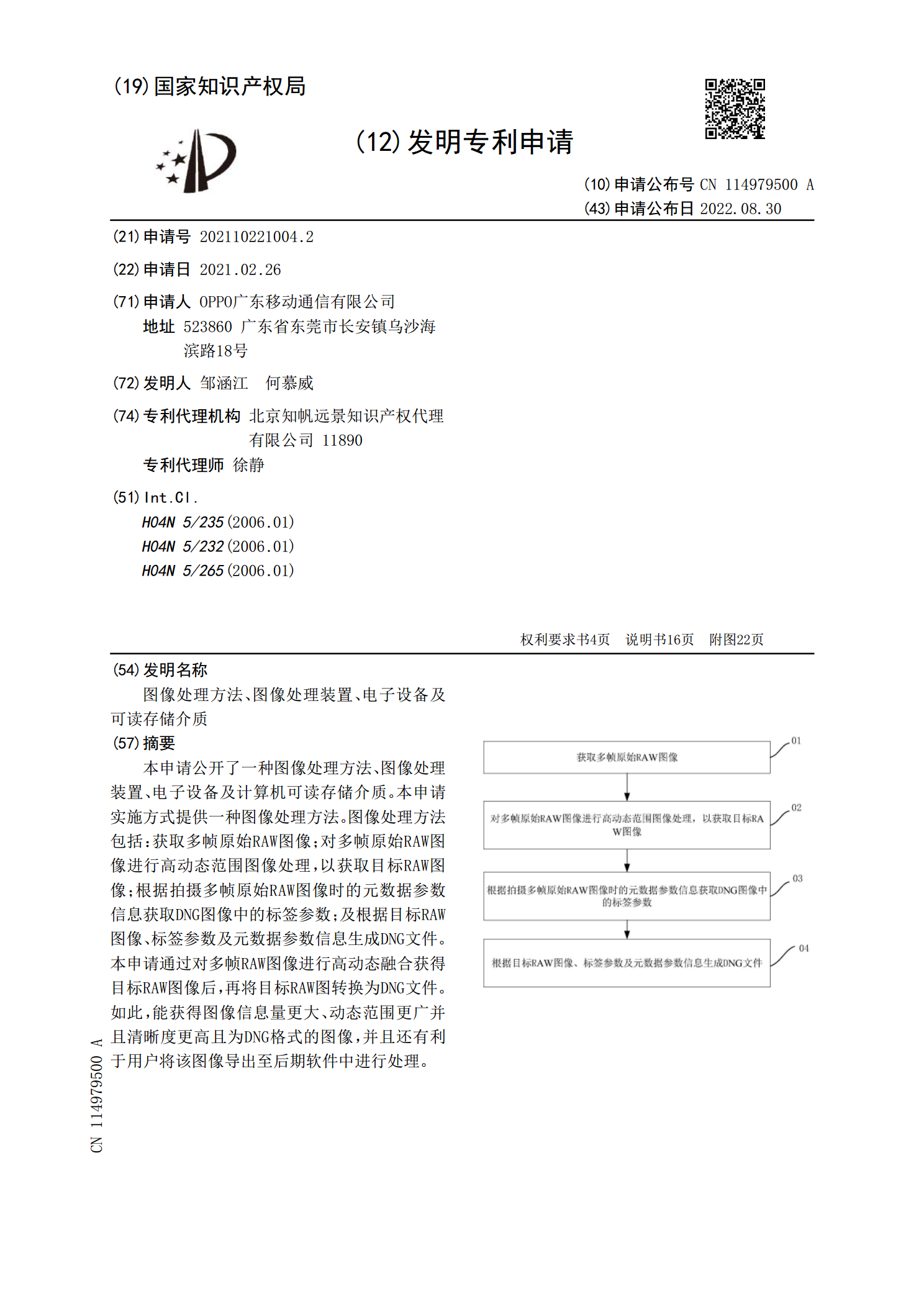
本申请公开了一种图像处理方法、图像处理装置、电子设备及计算机可读存储介质。本申请实施方式提供一种图像处理方法。图像处理方法包括:获取多帧原始RAW图像;对多帧原始RAW图像进行高动态范围图像处理,以获取目标RAW图像;根据拍摄多帧原始RAW图像时的元数据参数信息获取DNG图像中的标签参数;及根据目标RAW图像、标签参数及元数据参数信息生成DNG文件。本申请通过对多帧RAW图像进行高动态融合获得目标RAW图像后,再将目标RAW图转换为DNG文件。如此,能获得图像信息量更大、动态范围更广并且清晰度更高且为DN
图像处理方法、装置、电子设备及计算机可读存储介质.pdf
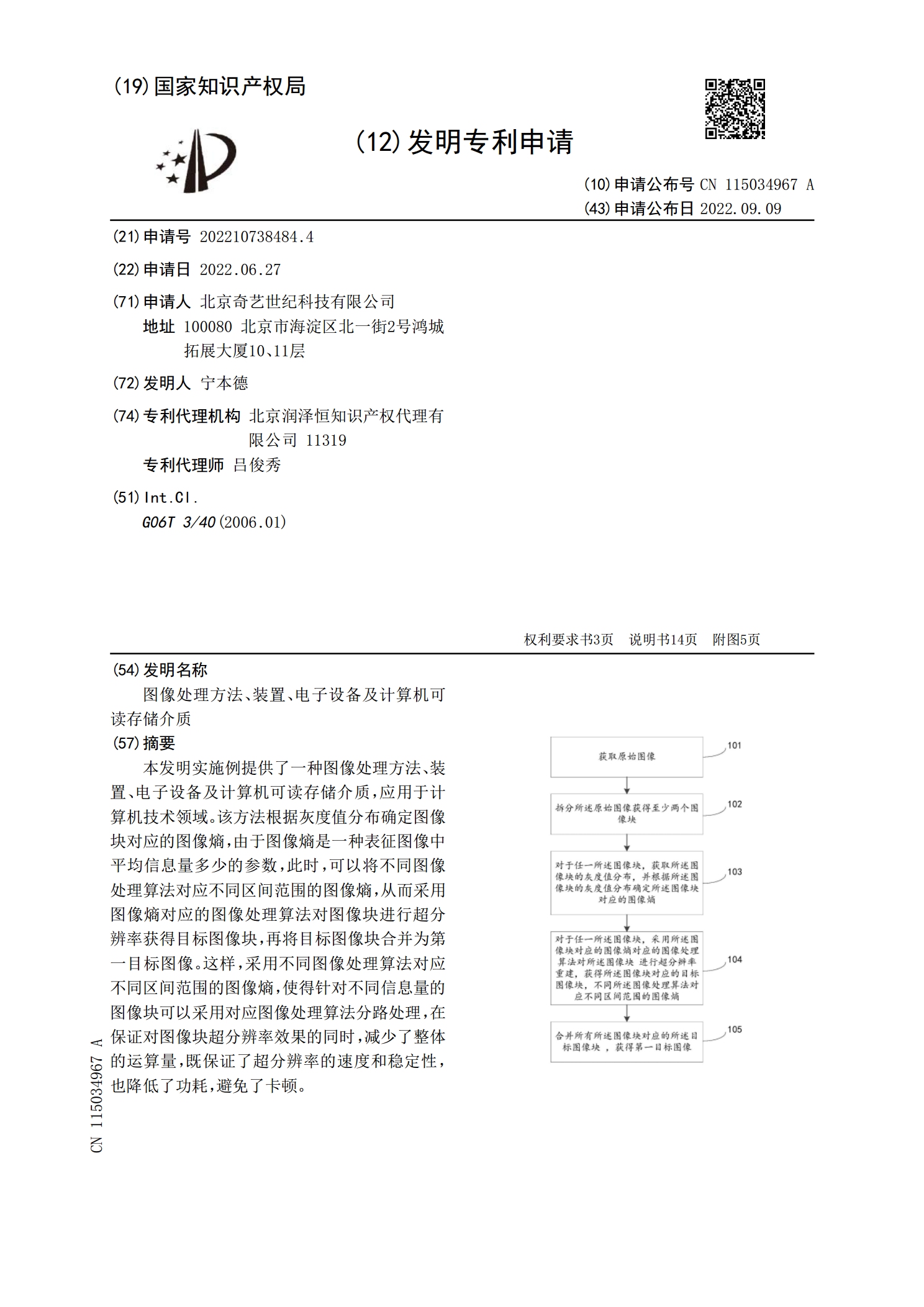
本发明实施例提供了一种图像处理方法、装置、电子设备及计算机可读存储介质,应用于计算机技术领域。该方法根据灰度值分布确定图像块对应的图像熵,由于图像熵是一种表征图像中平均信息量多少的参数,此时,可以将不同图像处理算法对应不同区间范围的图像熵,从而采用图像熵对应的图像处理算法对图像块进行超分辨率获得目标图像块,再将目标图像块合并为第一目标图像。这样,采用不同图像处理算法对应不同区间范围的图像熵,使得针对不同信息量的图像块可以采用对应图像处理算法分路处理,在保证对图像块超分辨率效果的同时,减少了整体的运算量,既
图像处理方法、装置、可读存储介质及电子设备.pdf
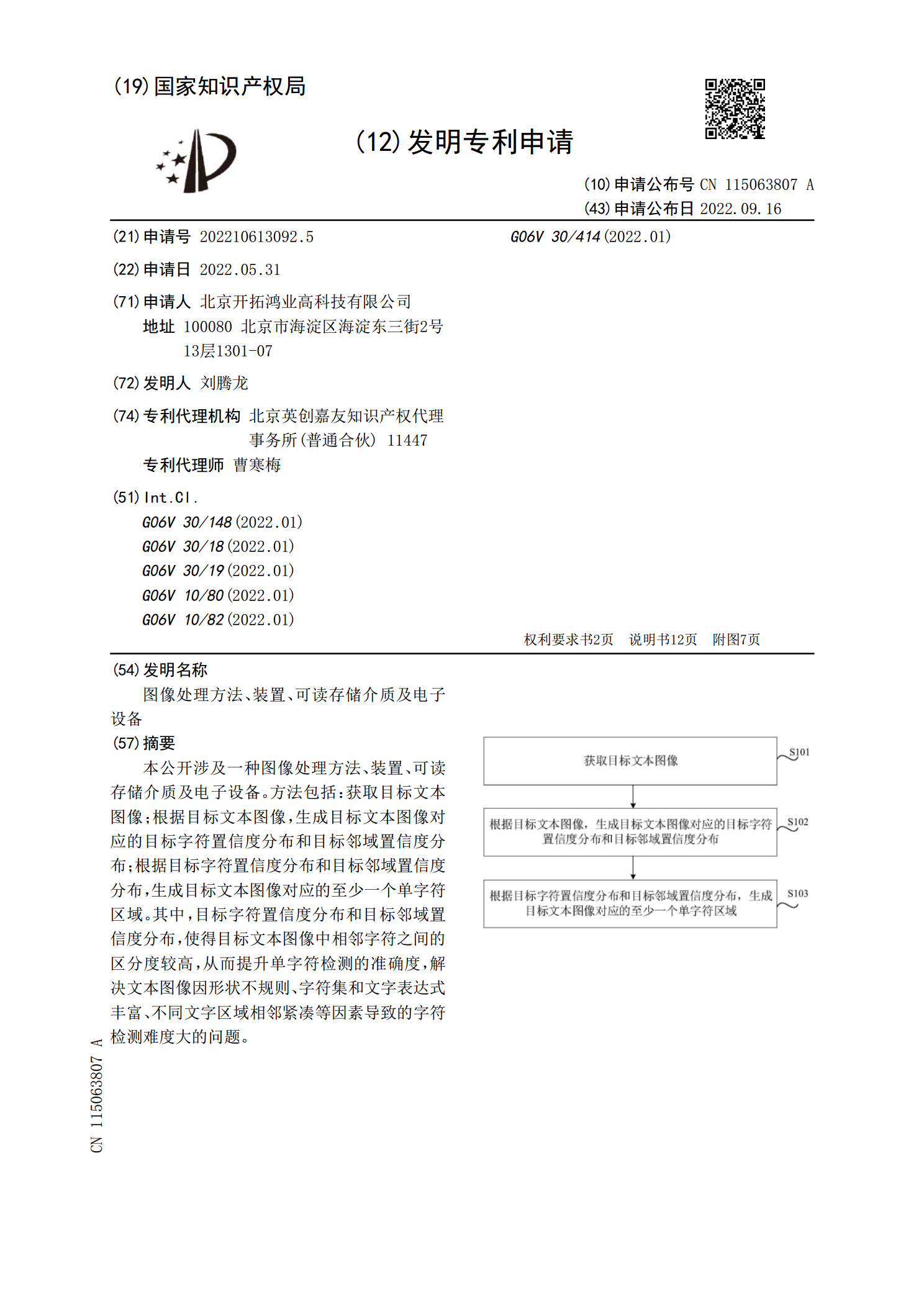
本公开涉及一种图像处理方法、装置、可读存储介质及电子设备。方法包括:获取目标文本图像;根据目标文本图像,生成目标文本图像对应的目标字符置信度分布和目标邻域置信度分布;根据目标字符置信度分布和目标邻域置信度分布,生成目标文本图像对应的至少一个单字符区域。其中,目标字符置信度分布和目标邻域置信度分布,使得目标文本图像中相邻字符之间的区分度较高,从而提升单字符检测的准确度,解决文本图像因形状不规则、字符集和文字表达式丰富、不同文字区域相邻紧凑等因素导致的字符检测难度大的问题。