
一种基于区域一致性和GMS的图像特征匹配方法.pdf

是你****芹呀

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于区域一致性和GMS的图像特征匹配方法.pdf
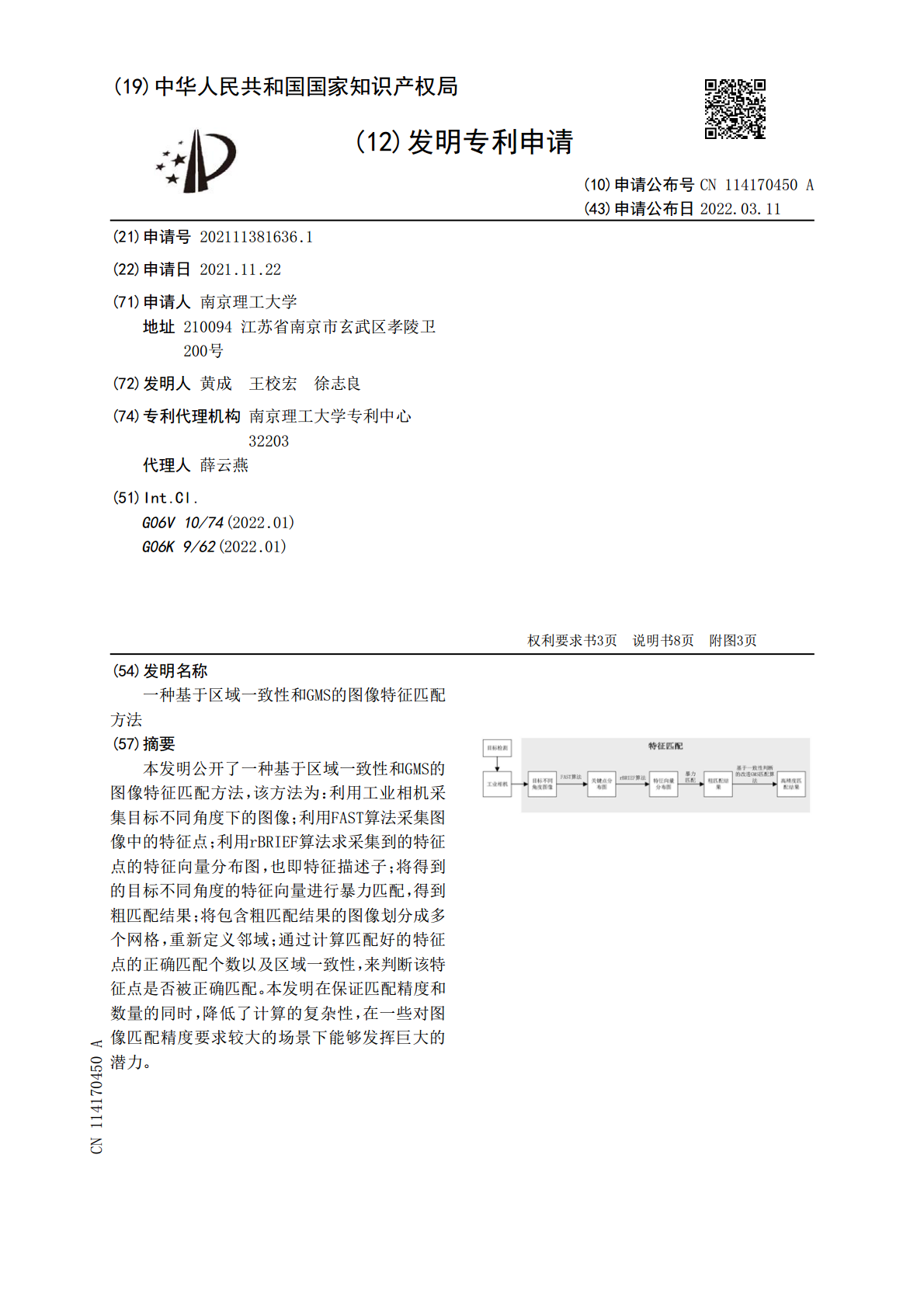
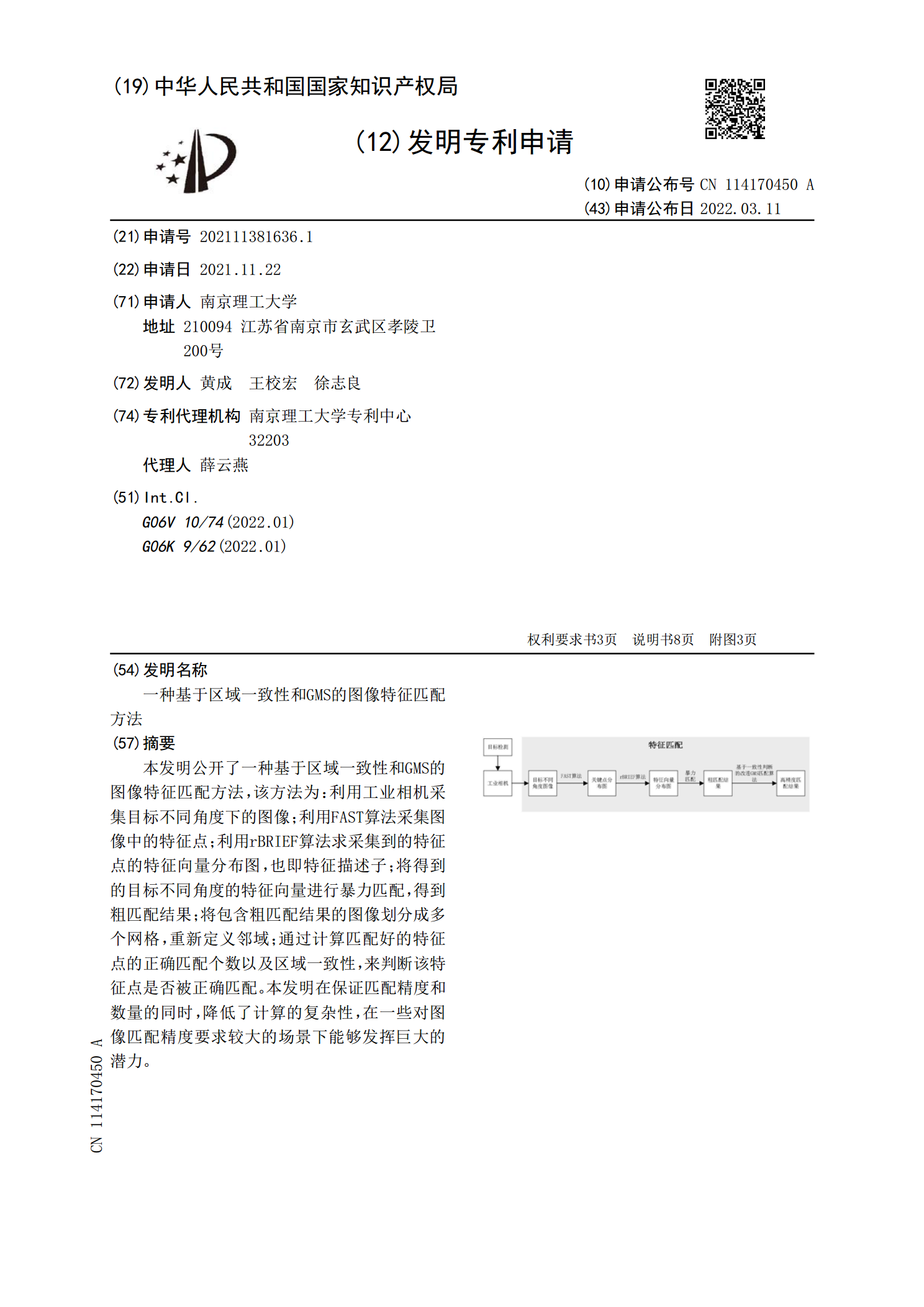
本发明公开了一种基于区域一致性和GMS的图像特征匹配方法,该方法为:利用工业相机采集目标不同角度下的图像;利用FAST算法采集图像中的特征点;利用rBRIEF算法求采集到的特征点的特征向量分布图,也即特征描述子;将得到的目标不同角度的特征向量进行暴力匹配,得到粗匹配结果;将包含粗匹配结果的图像划分成多个网格,重新定义邻域;通过计算匹配好的特征点的正确匹配个数以及区域一致性,来判断该特征点是否被正确匹配。本发明在保证匹配精度和数量的同时,降低了计算的复杂性,在一些对图像匹配精度要求较大的场景下能够发挥巨大的
一种基于草图局部特征和全局特征匹配的图像检索方法.pdf
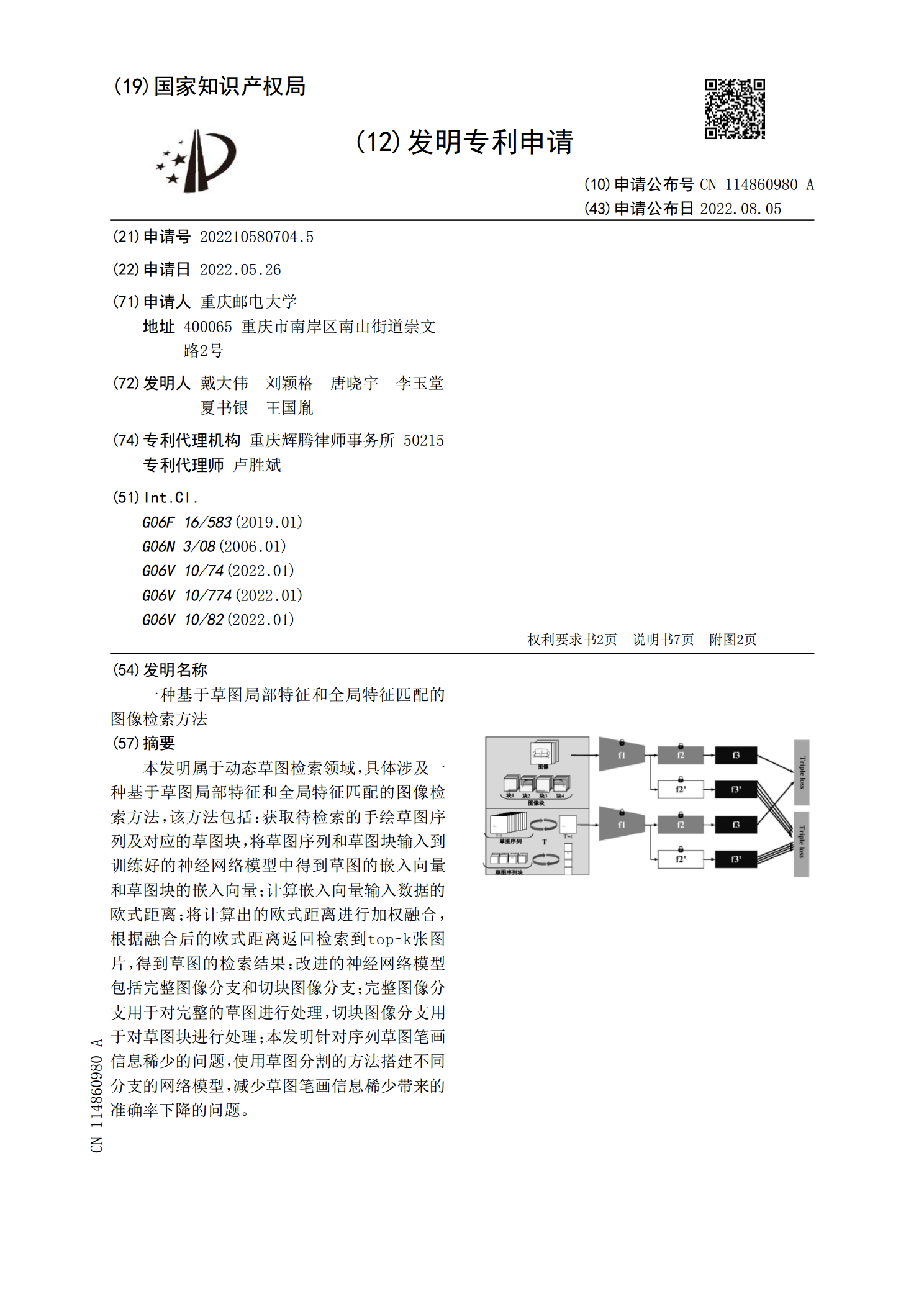
本发明属于动态草图检索领域,具体涉及一种基于草图局部特征和全局特征匹配的图像检索方法,该方法包括:获取待检索的手绘草图序列及对应的草图块,将草图序列和草图块输入到训练好的神经网络模型中得到草图的嵌入向量和草图块的嵌入向量;计算嵌入向量输入数据的欧式距离;将计算出的欧式距离进行加权融合,根据融合后的欧式距离返回检索到top‑k张图片,得到草图的检索结果;改进的神经网络模型包括完整图像分支和切块图像分支;完整图像分支用于对完整的草图进行处理,切块图像分支用于对草图块进行处理;本发明针对序列草图笔画信息稀少的问

一种基于全局-局部一致性网络的图像特征匹配方法.pdf
本发明涉及一种基于全局‑局部一致性网络的图像特征匹配方法,该方法包括获取参考图像和感知图像之间的假定匹配点集;计算假定匹配点集之间的向量长度和角度,并生成一个三维的运动向量分布图;利用全局变换一致性模块对运动向量分布图进行粗分类得到纯净的内点集;利用内点集作为假定匹配点集的邻域,为每个特征点构建邻域图;利用局部邻域一致性模块对邻域图进行相似度评估,获得优化后的对应关系。本发明可以在不依赖于任何预定义变换模型的情况下,处理各种各样的变换模式(刚性和非刚性),有效地过滤掉错误的匹配,并完全保留正确的对应关系。
一种基于点特征和轮廓特征融合的图像匹配定位方法.pdf
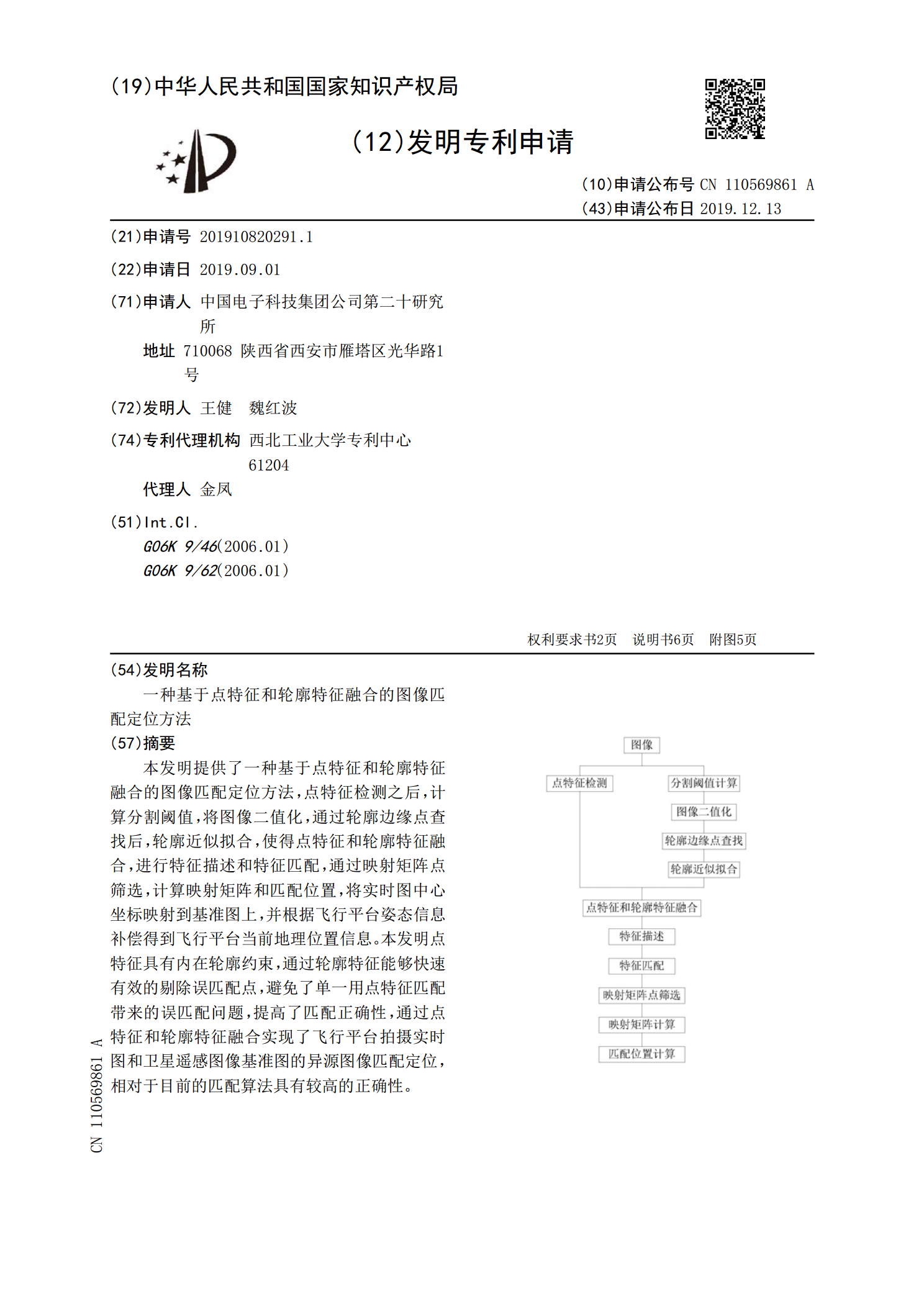
本发明提供了一种基于点特征和轮廓特征融合的图像匹配定位方法,点特征检测之后,计算分割阈值,将图像二值化,通过轮廓边缘点查找后,轮廓近似拟合,使得点特征和轮廓特征融合,进行特征描述和特征匹配,通过映射矩阵点筛选,计算映射矩阵和匹配位置,将实时图中心坐标映射到基准图上,并根据飞行平台姿态信息补偿得到飞行平台当前地理位置信息。本发明点特征具有内在轮廓约束,通过轮廓特征能够快速有效的剔除误匹配点,避免了单一用点特征匹配带来的误匹配问题,提高了匹配正确性,通过点特征和轮廓特征融合实现了飞行平台拍摄实时图和卫星遥感图
基于轮廓检测和特征匹配的图像配准方法.pdf
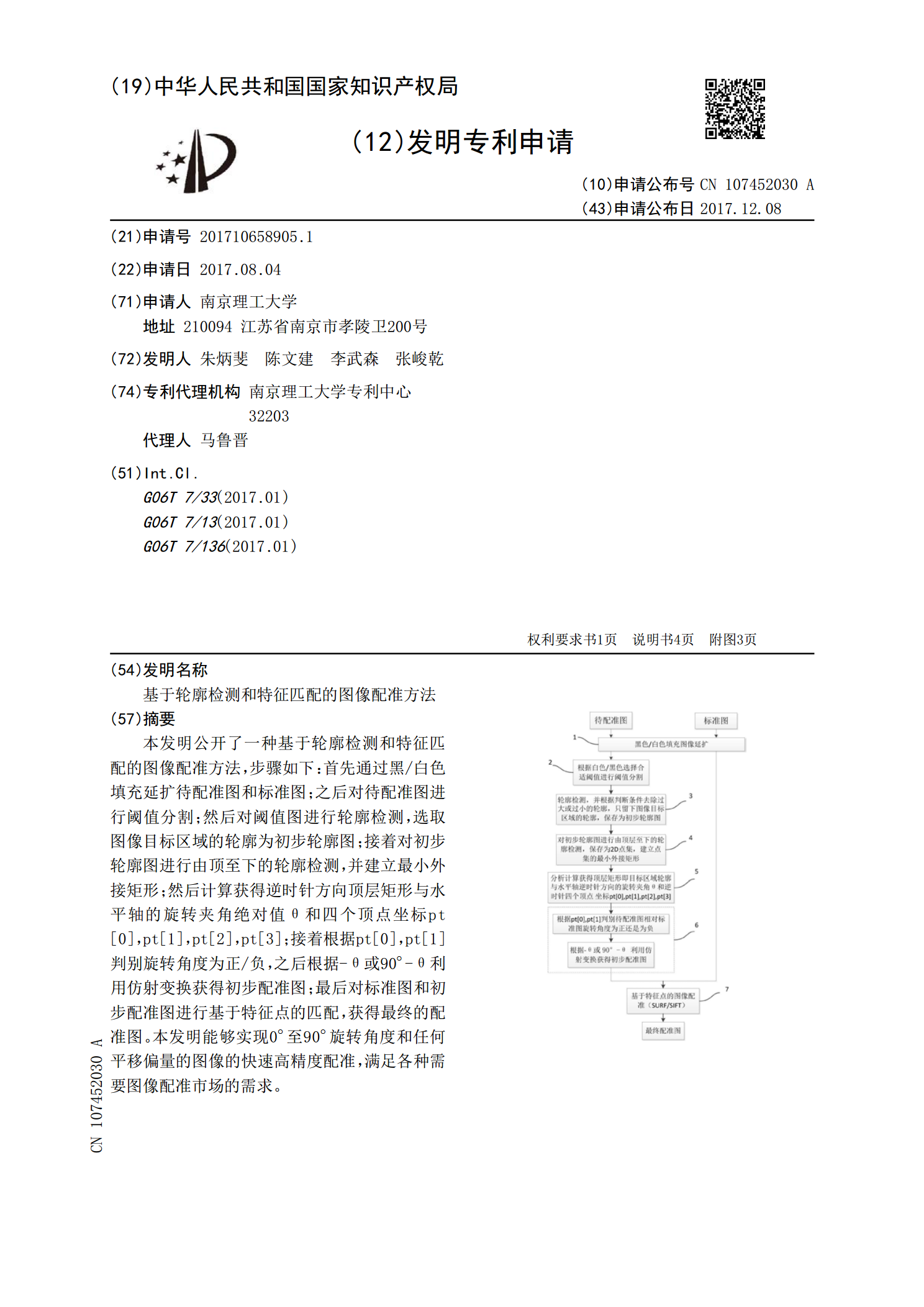
本发明公开了一种基于轮廓检测和特征匹配的图像配准方法,步骤如下:首先通过黑/白色填充延扩待配准图和标准图;之后对待配准图进行阈值分割;然后对阈值图进行轮廓检测,选取图像目标区域的轮廓为初步轮廓图;接着对初步轮廓图进行由顶至下的轮廓检测,并建立最小外接矩形;然后计算获得逆时针方向顶层矩形与水平轴的旋转夹角绝对值θ和四个顶点坐标pt[0],pt[1],pt[2],pt[3];接着根据pt[0],pt[1]判别旋转角度为正/负,之后根据‑θ或90°‑θ利用仿射变换获得初步配准图;最后对标准图和初步配准图进行基于