
一种基于全局-局部一致性网络的图像特征匹配方法.pdf

小新****ou


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于全局-局部一致性网络的图像特征匹配方法.pdf
本发明涉及一种基于全局‑局部一致性网络的图像特征匹配方法,该方法包括获取参考图像和感知图像之间的假定匹配点集;计算假定匹配点集之间的向量长度和角度,并生成一个三维的运动向量分布图;利用全局变换一致性模块对运动向量分布图进行粗分类得到纯净的内点集;利用内点集作为假定匹配点集的邻域,为每个特征点构建邻域图;利用局部邻域一致性模块对邻域图进行相似度评估,获得优化后的对应关系。本发明可以在不依赖于任何预定义变换模型的情况下,处理各种各样的变换模式(刚性和非刚性),有效地过滤掉错误的匹配,并完全保留正确的对应关系。
一种基于草图局部特征和全局特征匹配的图像检索方法.pdf
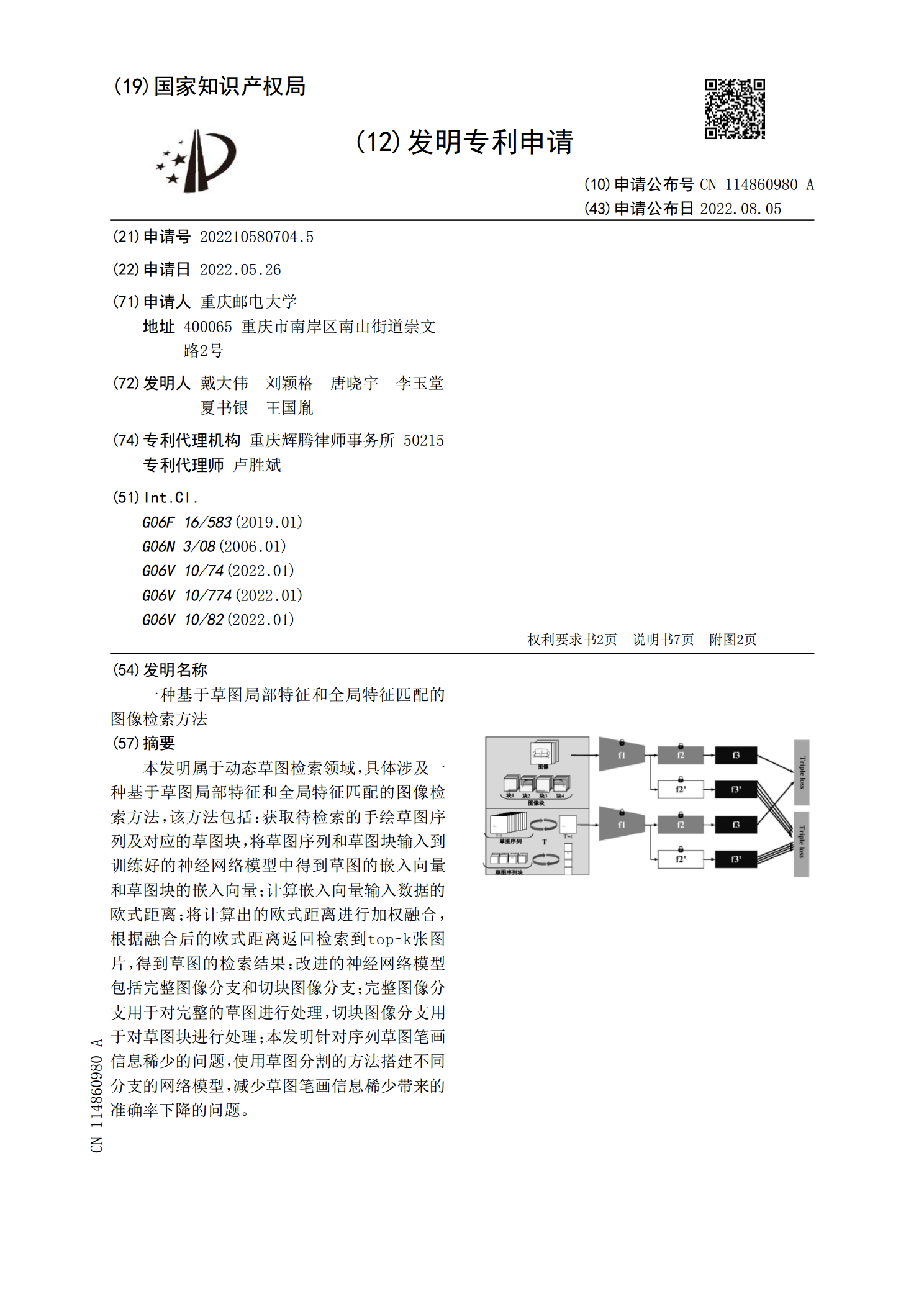
本发明属于动态草图检索领域,具体涉及一种基于草图局部特征和全局特征匹配的图像检索方法,该方法包括:获取待检索的手绘草图序列及对应的草图块,将草图序列和草图块输入到训练好的神经网络模型中得到草图的嵌入向量和草图块的嵌入向量;计算嵌入向量输入数据的欧式距离;将计算出的欧式距离进行加权融合,根据融合后的欧式距离返回检索到top‑k张图片,得到草图的检索结果;改进的神经网络模型包括完整图像分支和切块图像分支;完整图像分支用于对完整的草图进行处理,切块图像分支用于对草图块进行处理;本发明针对序列草图笔画信息稀少的问

基于局部与全局特征融合的遥感图像分类方法和装置.pdf
本申请涉及图像识别技术领域的一种基于局部与全局特征融合的遥感图像分类方法和装置。该方法包括:将获取的遥感图像进行标注作为训练样本;构建遥感图像分类模型,该模型包括输入网络、特征提取网络和分类网络;其中,输入网络用于采用空洞卷积对训练样本进行多分支多尺度特征提取,特征提取网络用于采用4个由1个下采样层和若干个堆叠的RMFE模块组成stage依次进行全局与局部特征提取与融合,其中RMFE模块采用纯卷积方式同时提取局部与全局特征;采用训练样本对遥感图像分类模型进行训练,采用训练好的遥感图像分类模型对待测遥感图像
一种基于区域一致性和GMS的图像特征匹配方法.pdf
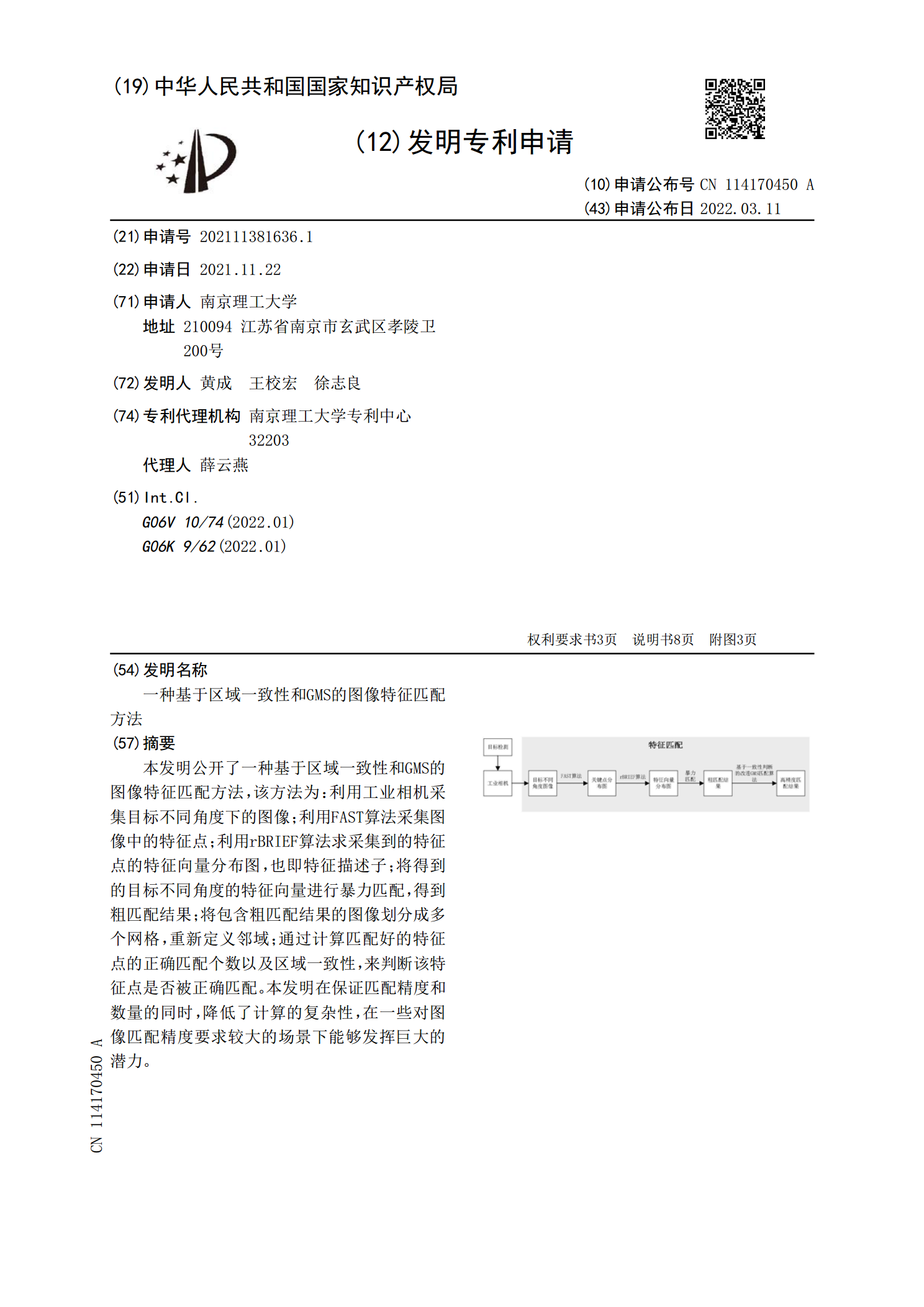
本发明公开了一种基于区域一致性和GMS的图像特征匹配方法,该方法为:利用工业相机采集目标不同角度下的图像;利用FAST算法采集图像中的特征点;利用rBRIEF算法求采集到的特征点的特征向量分布图,也即特征描述子;将得到的目标不同角度的特征向量进行暴力匹配,得到粗匹配结果;将包含粗匹配结果的图像划分成多个网格,重新定义邻域;通过计算匹配好的特征点的正确匹配个数以及区域一致性,来判断该特征点是否被正确匹配。本发明在保证匹配精度和数量的同时,降低了计算的复杂性,在一些对图像匹配精度要求较大的场景下能够发挥巨大的

一种基于全局特征与局部特征融合的点云配准方法.pdf
本发明公开了一种基于全局特征与局部特征融合的点云配准方法,包括:获取基准点云和待配准点云;分别提取基准点云与待配准点云的点云特征,构成初始基准点云特征集和初始待配准点云特征集;通过引入自注意力机制与交叉注意力机制,同时引入基准点云与待配准点云之间的相关性信息,构成最终基准点云特征集和最终待配准点云特征集;获得每一个点对之间的相似度信息;根据点对之间的相似度信息构建匹配点对关系矩阵;获取基准点云和待配准点云的变换模型参数;对基准点云和待配准点云进行配准。本发明通过结合局部特征与全局特征,充分挖掘点云数据潜在