
一种基于实例分割的语义SLAM方法.pdf

康平****ng

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于实例分割的语义SLAM方法.pdf
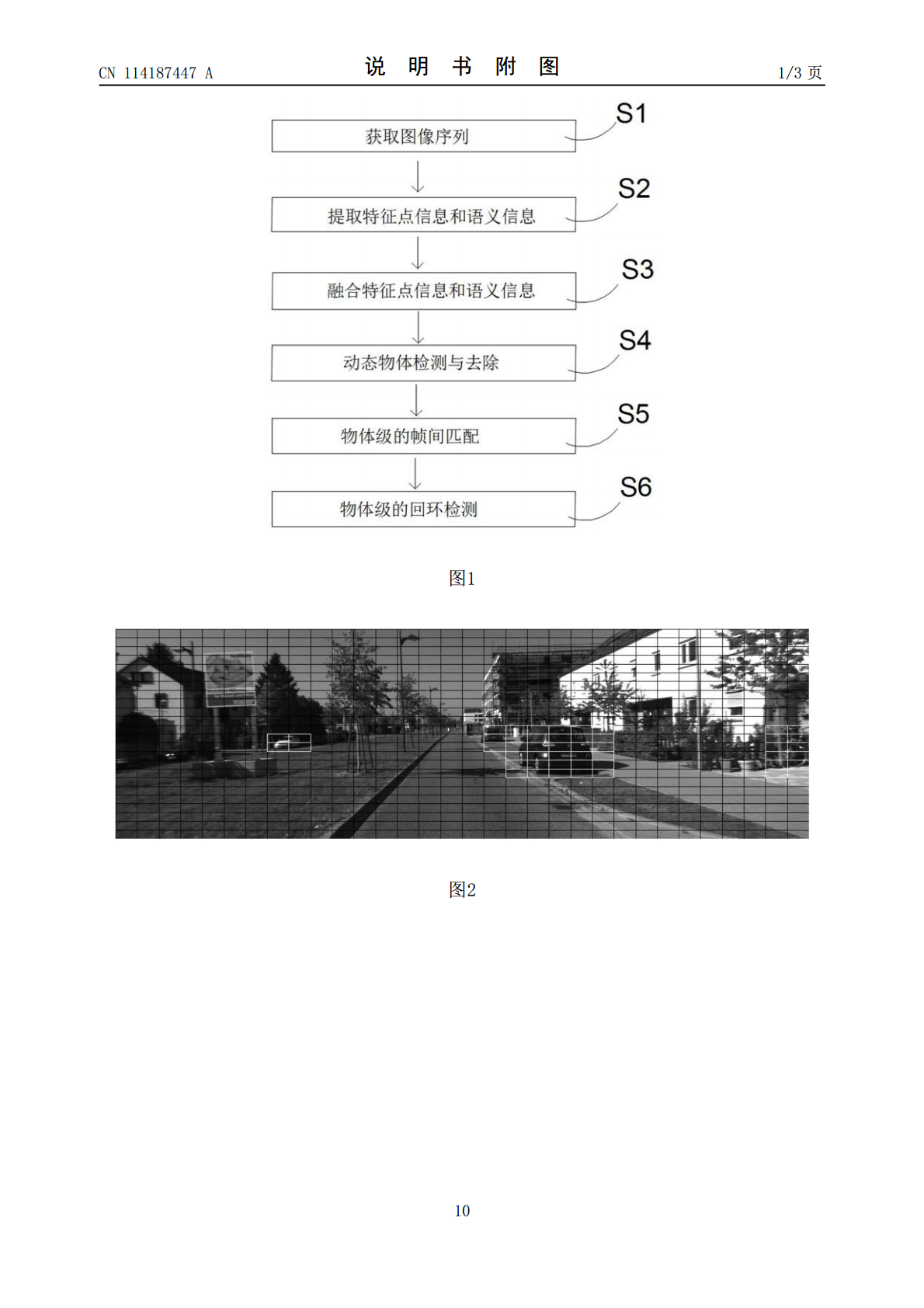
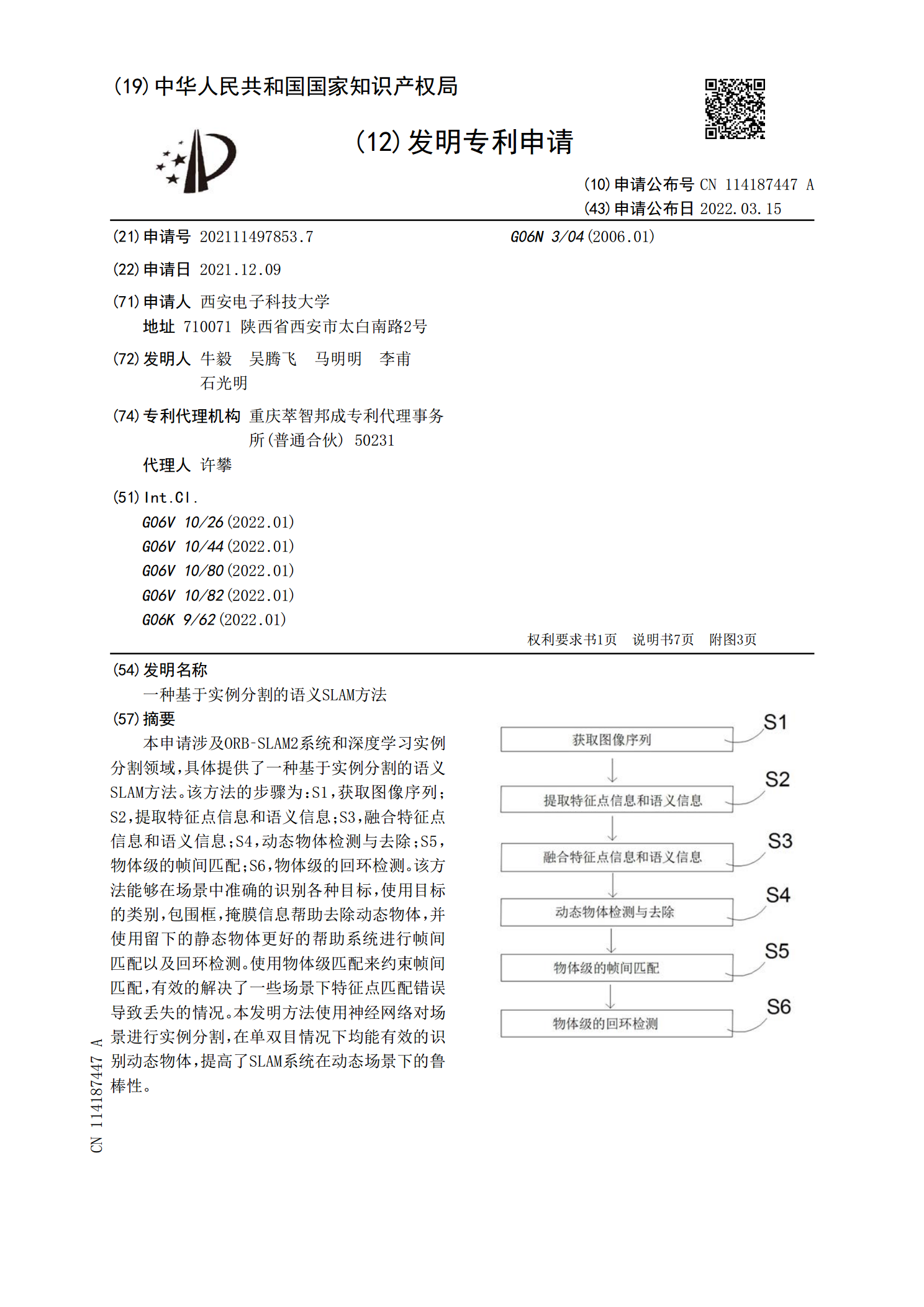
本申请涉及ORB‑SLAM2系统和深度学习实例分割领域,具体提供了一种基于实例分割的语义SLAM方法。该方法的步骤为:S1,获取图像序列;S2,提取特征点信息和语义信息;S3,融合特征点信息和语义信息;S4,动态物体检测与去除;S5,物体级的帧间匹配;S6,物体级的回环检测。该方法能够在场景中准确的识别各种目标,使用目标的类别,包围框,掩膜信息帮助去除动态物体,并使用留下的静态物体更好的帮助系统进行帧间匹配以及回环检测。使用物体级匹配来约束帧间匹配,有效的解决了一些场景下特征点匹配错误导致丢失的情况。本发

一种基于互信息和语义分割的SLAM方法.pdf
本发明涉及一种基于互信息和语义分割的SLAM方法,包括:获取待识别对象的初步图像信息,对初步图像信息进行预处理,获得有效图像信息;采用基于信息熵的特征点提取算法得到有效图像信息中的特征点及描述子;采用语义分割模型预测得到有效图像信息中的语义信息,采用语义不确定性修正法修正特征点的语义不确定性估计结果;采用对极几何法得到有效图像信息中的潜在静态物体信息,保留提取于潜在静态物体上的特征点,利用保留的特征点进行位姿估计和地图构建。与现有技术相比,本发明具有位姿估计准确性高、跟踪稳定、定位和建图质量高、系统存储复
基于语义分割的实例分割系统和方法.pdf
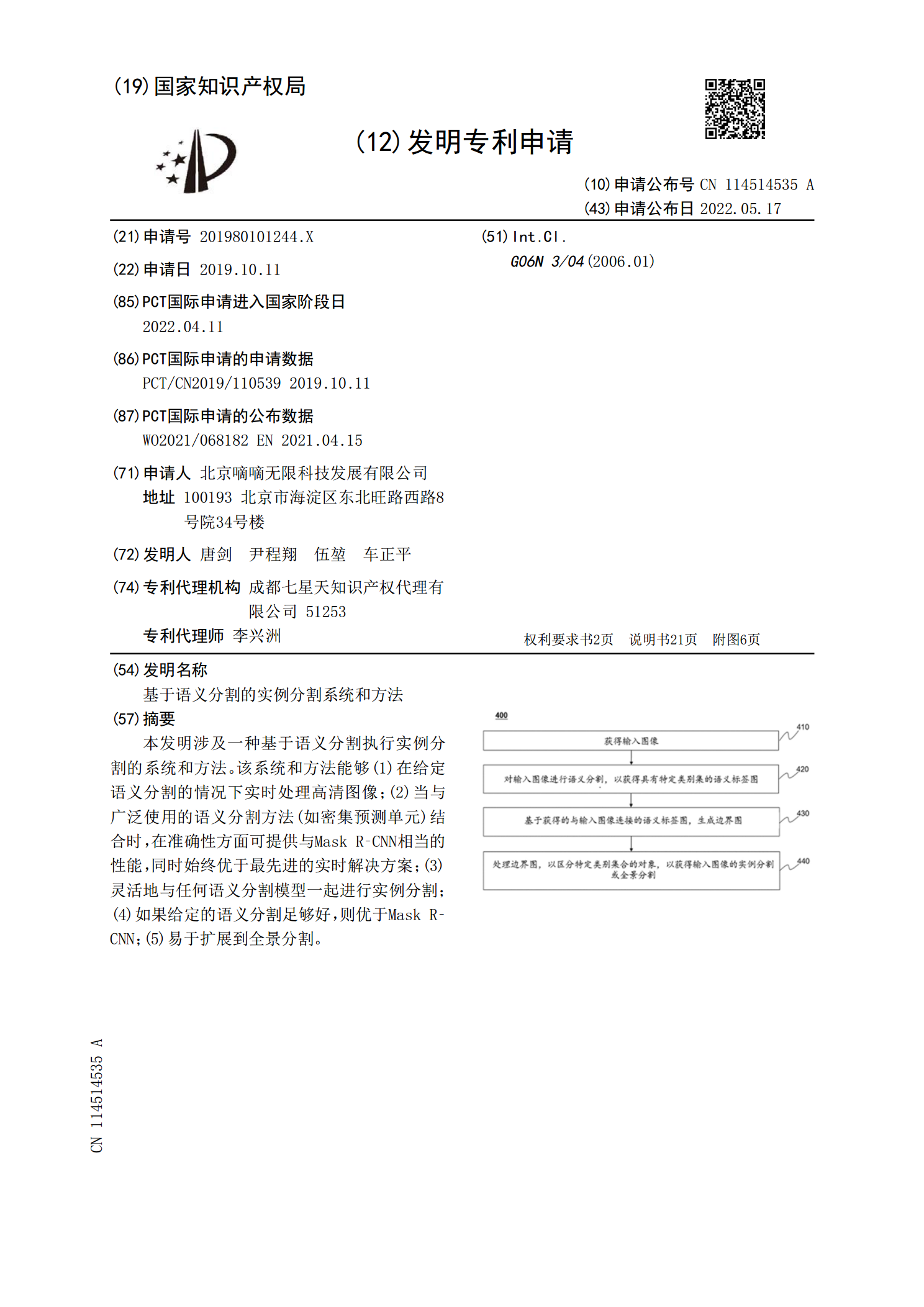
本发明涉及一种基于语义分割执行实例分割的系统和方法。该系统和方法能够(1)在给定语义分割的情况下实时处理高清图像;(2)当与广泛使用的语义分割方法(如密集预测单元)结合时,在准确性方面可提供与MaskR?CNN相当的性能,同时始终优于最先进的实时解决方案;(3)灵活地与任何语义分割模型一起进行实例分割;(4)如果给定的语义分割足够好,则优于MaskR?CNN;(5)易于扩展到全景分割。
一种基于语义分割的动态环境双目视觉SLAM方法.pdf
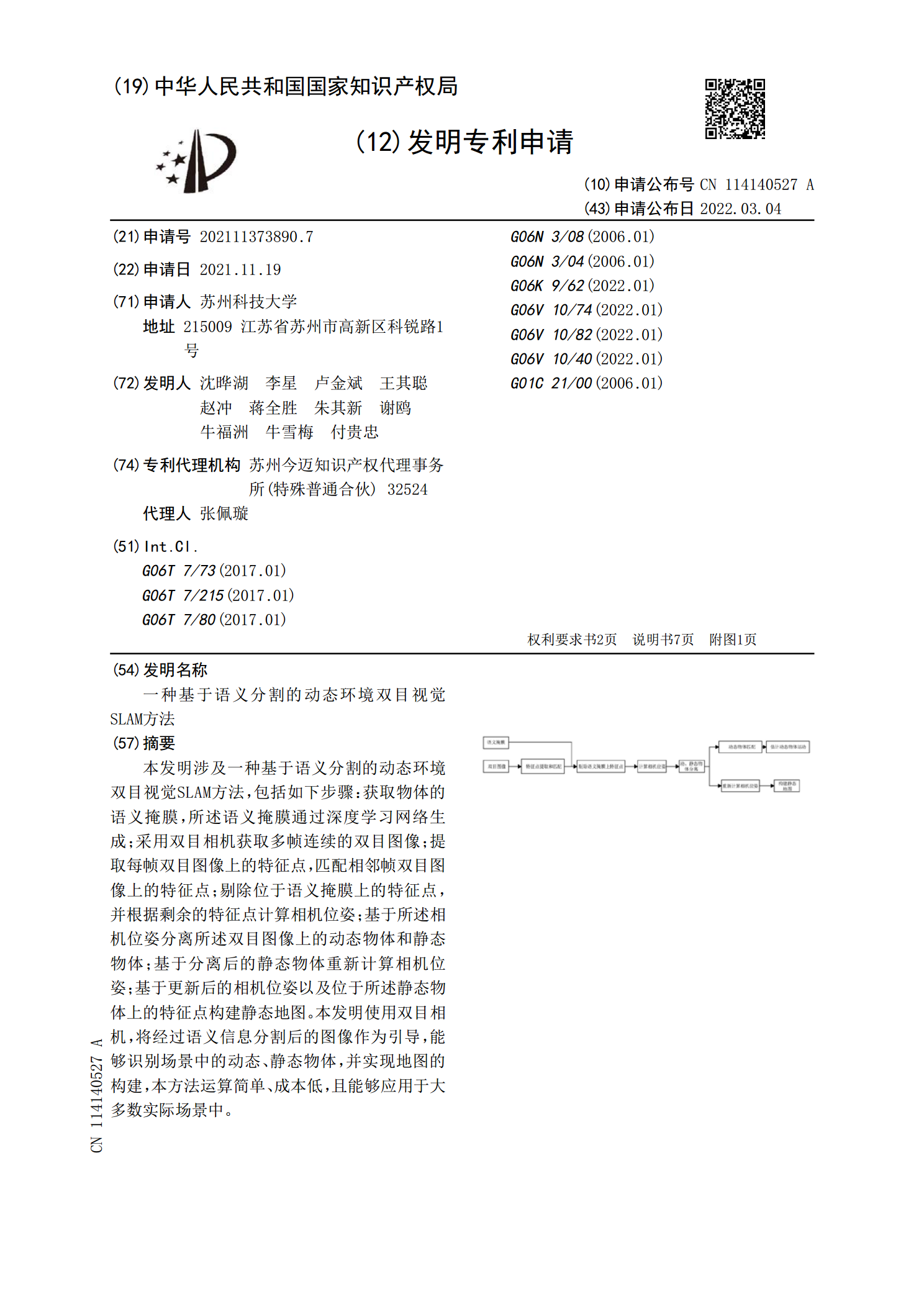
本发明涉及一种基于语义分割的动态环境双目视觉SLAM方法,包括如下步骤:获取物体的语义掩膜,所述语义掩膜通过深度学习网络生成;采用双目相机获取多帧连续的双目图像;提取每帧双目图像上的特征点,匹配相邻帧双目图像上的特征点;剔除位于语义掩膜上的特征点,并根据剩余的特征点计算相机位姿;基于所述相机位姿分离所述双目图像上的动态物体和静态物体;基于分离后的静态物体重新计算相机位姿;基于更新后的相机位姿以及位于所述静态物体上的特征点构建静态地图。本发明使用双目相机,将经过语义信息分割后的图像作为引导,能够识别场景中的

基于YOLACT实例分割模型的动态场景SLAM方法.pdf
本发明公开了一种基于YOLACT实例分割模型的动态场景SLAM方法,首先采用YOLACT实例分割模型对当前帧图像进行实例分割处理,从而区分得到图像中的动态像素和静态像素;对于当前帧图像中的静态像素部分,提取出该部分的特征点;在提取的特征点的基础上选取关键帧;针对选出的关键帧再次剔除动态像素,留下静态像素构造地图,并进行地图初始化;对于剩余下来的静态像素区域,提取该区域的ORB特征点,更新关键帧;在关键帧之间进行特征点的匹配,利用OBR特征点更新局部地图;用局部集束调整优化关键帧的位姿;利用回环检测来优化位