
一种滑行能量回收控制方法、装置及系统.pdf

森林****来了


1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种滑行能量回收控制方法、装置及系统.pdf
本申请公开了一种滑行能量回收控制方法、装置和系统,所述方法例如包括:获取目标外部制动请求;获取制动踏板制动行程,所述制动踏板制动行程包括驾驶员控制踏板制动行程和/或制动踏板自动下沉行程;根据所述制动踏板制动行程得到制动踏板制动请求;基于所述目标外部制动请求和所述制动踏板制动请求进行取大处理得到最终制动请求;获取能量回收能力扭矩;基于所述最终制动请求和所述能量回收能力扭矩确定电制动和液压制动的分配比例。

滑行能量回收系统和滑行能量回收方法.pdf
本申请涉及一种滑行能量回收系统(10),包括:目标能量回收计算单元(1),所述目标能量回收计算单元(1)基于期望减速度计算当前需要回收的滑行功率;回收能力计算单元(2),所述回收能力计算单元(2)在考虑车辆当前的回收能力的情况下计算当前能够回收的滑行功率;比较单元(3),所述比较单元(3)对所述需要回收的滑行功率和所述能够回收的滑行功率进行比较,并且输出比较结果;以及决策单元(4),所述决策单元(4)获取所述比较结果,并且在所述需要回收的滑行功率大于所述能够回收的滑行功率的情况下触发车辆的制动系统进行制动
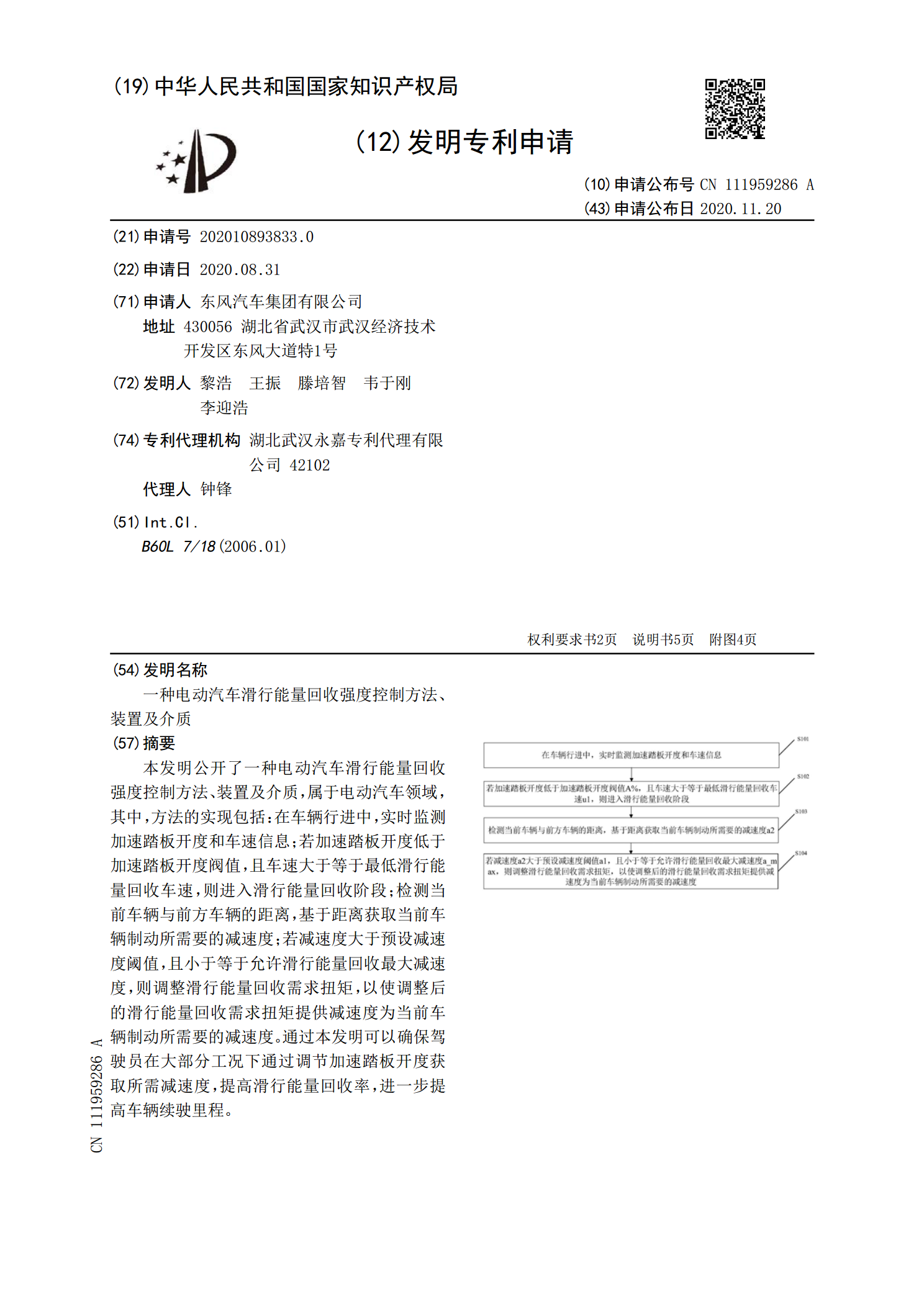
一种电动汽车滑行能量回收强度控制方法、装置及介质.pdf
本发明公开了一种电动汽车滑行能量回收强度控制方法、装置及介质,属于电动汽车领域,其中,方法的实现包括:在车辆行进中,实时监测加速踏板开度和车速信息;若加速踏板开度低于加速踏板开度阀值,且车速大于等于最低滑行能量回收车速,则进入滑行能量回收阶段;检测当前车辆与前方车辆的距离,基于距离获取当前车辆制动所需要的减速度;若减速度大于预设减速度阈值,且小于等于允许滑行能量回收最大减速度,则调整滑行能量回收需求扭矩,以使调整后的滑行能量回收需求扭矩提供减速度为当前车辆制动所需要的减速度。通过本发明可以确保驾驶员在大部
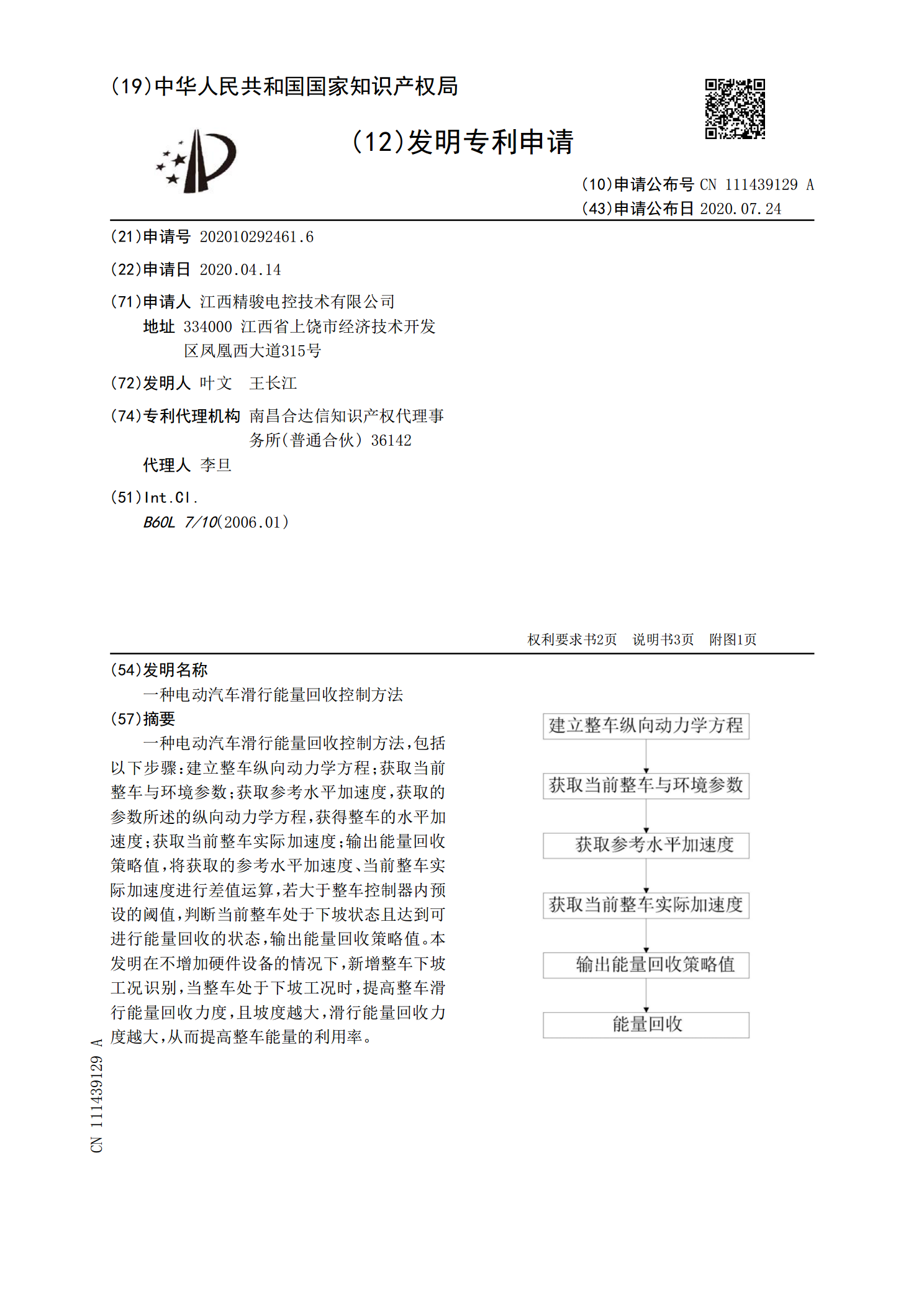
一种电动汽车滑行能量回收控制方法.pdf
一种电动汽车滑行能量回收控制方法,包括以下步骤:建立整车纵向动力学方程;获取当前整车与环境参数;获取参考水平加速度,获取的参数所述的纵向动力学方程,获得整车的水平加速度;获取当前整车实际加速度;输出能量回收策略值,将获取的参考水平加速度、当前整车实际加速度进行差值运算,若大于整车控制器内预设的阈值,判断当前整车处于下坡状态且达到可进行能量回收的状态,输出能量回收策略值。本发明在不增加硬件设备的情况下,新增整车下坡工况识别,当整车处于下坡工况时,提高整车滑行能量回收力度,且坡度越大,滑行能量回收力度越大,从

用于进行车辆制动滑行能量回收的控制方法及控制系统.pdf
本发明属于车辆控制技术领域,具体涉及一种用于进行车辆制动滑行能量回收的控制方法及控制系统。本发明所述的用于进行车辆制动滑行能量回收的控制方法,包括以下步骤;将车辆的油门踏板完全松开;通过检测系统检测车辆与前方车辆间的距离值;计算车辆与前方车辆当前距离下进行制动滑行能量回收的最小车速值;判断车辆的实时车速是否大于车辆进行制动滑行能量回收的最小车速值;若车辆的实时车速大于车辆进行制动滑行能量回收的最小车速值时,则进行车辆的制动滑行能量回收。通过使用本发明所述的控制方法及控制系统,能够避免人为决策的盲目性和能量