
开门方法、机器人以及计算机可读存储介质.pdf

宜然****找我

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

开门方法、机器人以及计算机可读存储介质.pdf
本申请公开了一种开门方法、机器人以及计算机可读存储介质,该开门方法包括:对目标场景的彩色图像进行识别,得到门的图像以及把手的图像;根据目标场景的深度图像,确定门的图像对应的第一点云以及把手的图像对应的第二点云;获取门的状态;在门的状态为关闭状态时,根据第一点云和第二点云中的至少一个,确定门与地面平行的法向量;至少根据法向量以及第二点云,确定执行器的位姿;驱动执行器按照位姿抓取把手;在执行器抓取把手的同时,驱动执行器按照第一圆弧轨迹运动以旋拧把手,以及驱动执行器按照第二圆弧轨迹运动以打开门。本申请所提供的方
机器人及其避障方法以及计算机可读存储介质.pdf
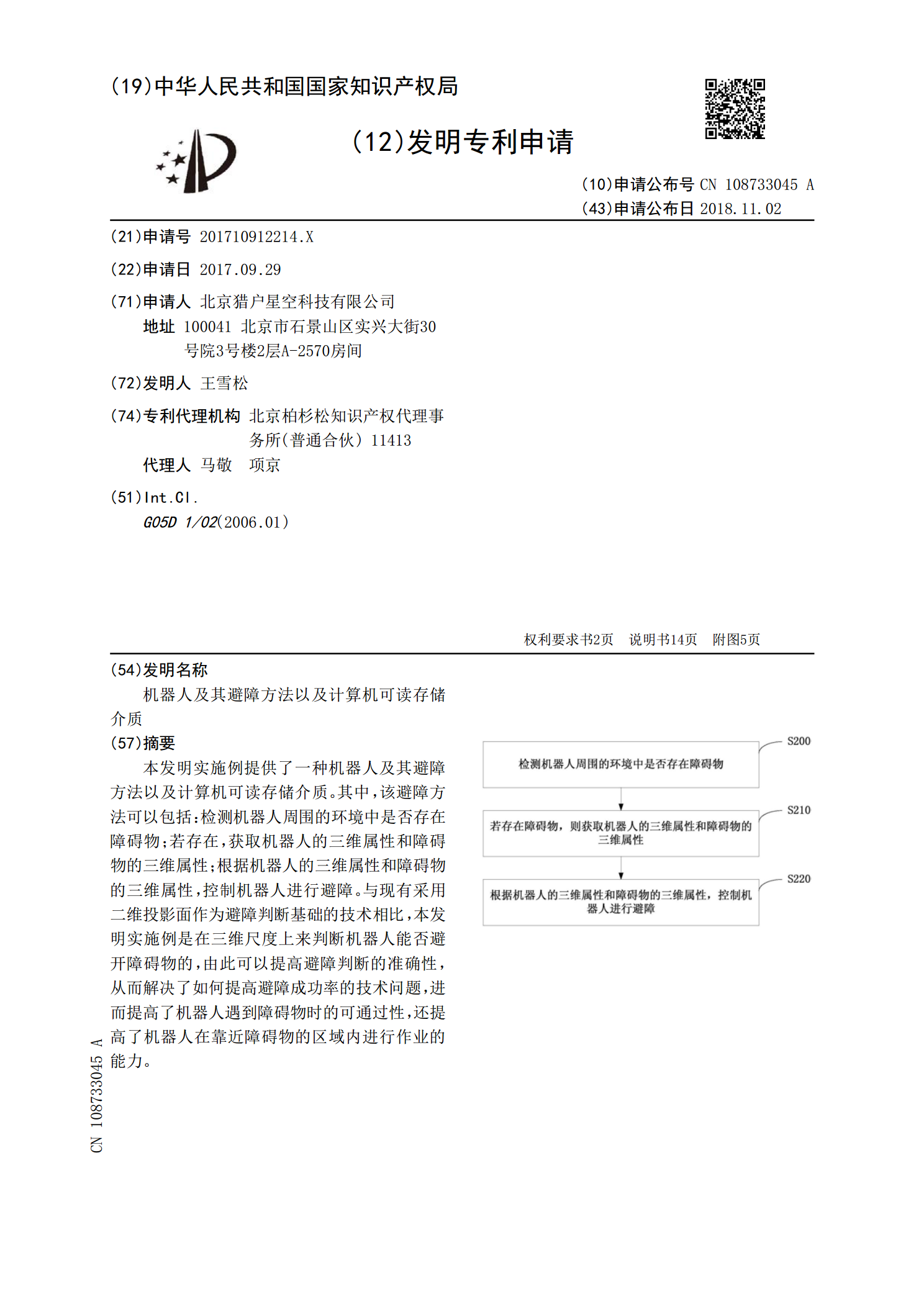
本发明实施例提供了一种机器人及其避障方法以及计算机可读存储介质。其中,该避障方法可以包括:检测机器人周围的环境中是否存在障碍物;若存在,获取机器人的三维属性和障碍物的三维属性;根据机器人的三维属性和障碍物的三维属性,控制机器人进行避障。与现有采用二维投影面作为避障判断基础的技术相比,本发明实施例是在三维尺度上来判断机器人能否避开障碍物的,由此可以提高避障判断的准确性,从而解决了如何提高避障成功率的技术问题,进而提高了机器人遇到障碍物时的可通过性,还提高了机器人在靠近障碍物的区域内进行作业的能力。
机器人及其控制方法以及可读存储介质.pdf
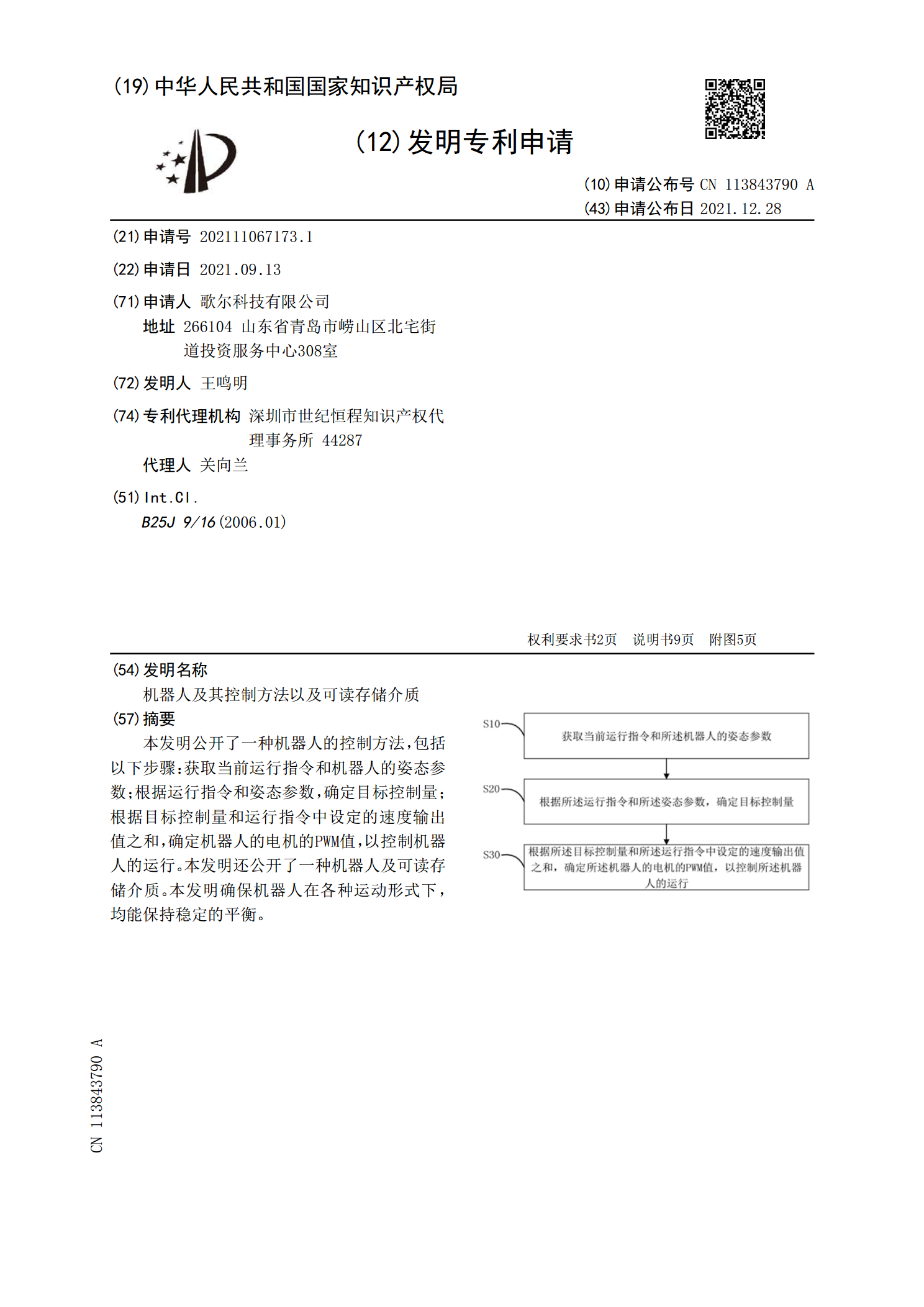
本发明公开了一种机器人的控制方法,包括以下步骤:获取当前运行指令和机器人的姿态参数;根据运行指令和姿态参数,确定目标控制量;根据目标控制量和运行指令中设定的速度输出值之和,确定机器人的电机的PWM值,以控制机器人的运行。本发明还公开了一种机器人及可读存储介质。本发明确保机器人在各种运动形式下,均能保持稳定的平衡。
门锁开门方法、门锁及计算机可读存储介质.pdf
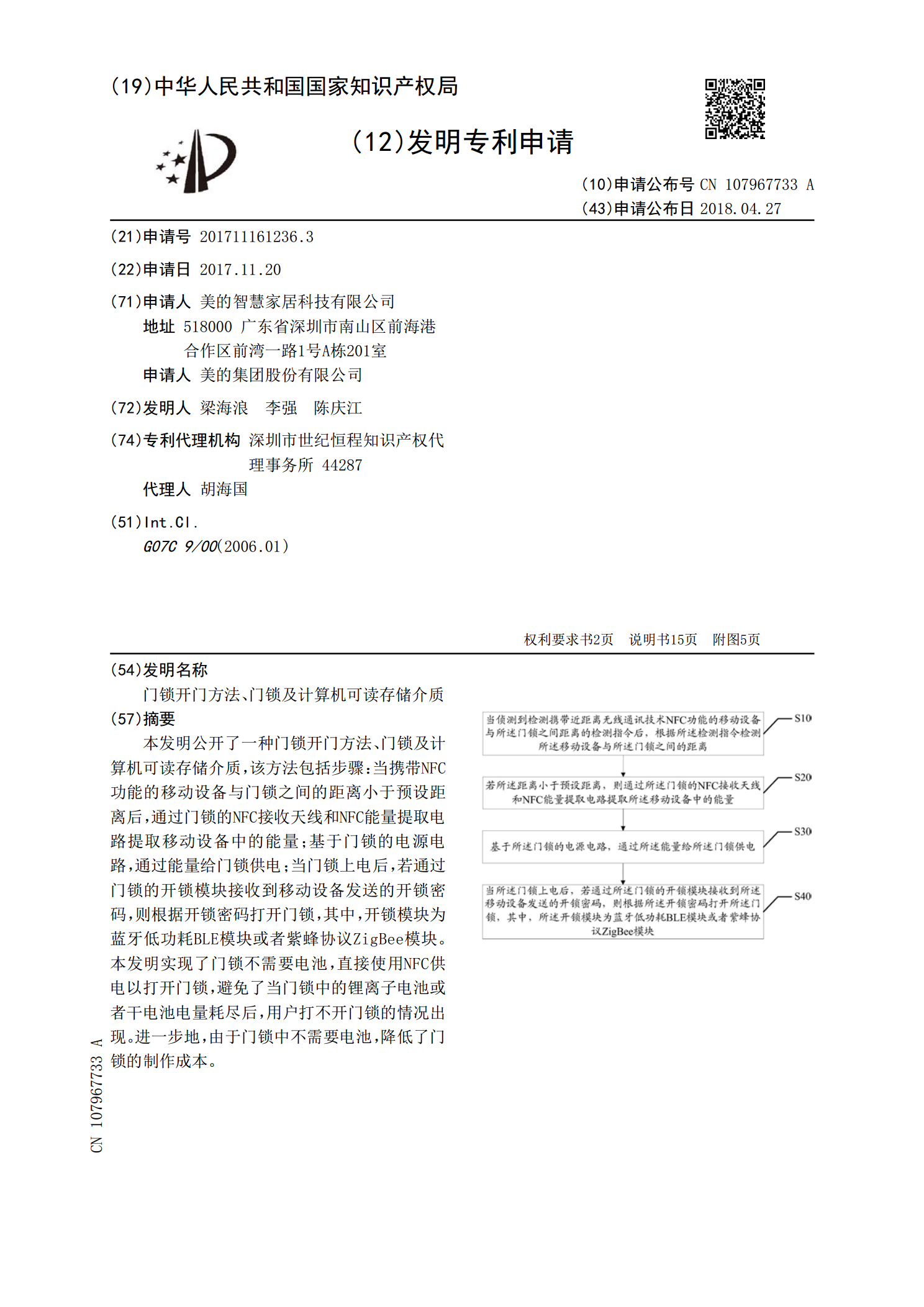
本发明公开了一种门锁开门方法、门锁及计算机可读存储介质,该方法包括步骤:当携带NFC功能的移动设备与门锁之间的距离小于预设距离后,通过门锁的NFC接收天线和NFC能量提取电路提取移动设备中的能量;基于门锁的电源电路,通过能量给门锁供电;当门锁上电后,若通过门锁的开锁模块接收到移动设备发送的开锁密码,则根据开锁密码打开门锁,其中,开锁模块为蓝牙低功耗BLE模块或者紫蜂协议ZigBee模块。本发明实现了门锁不需要电池,直接使用NFC供电以打开门锁,避免了当门锁中的锂离子电池或者干电池电量耗尽后,用户打不开门锁
标注方法、装置以及计算机可读存储介质.pdf
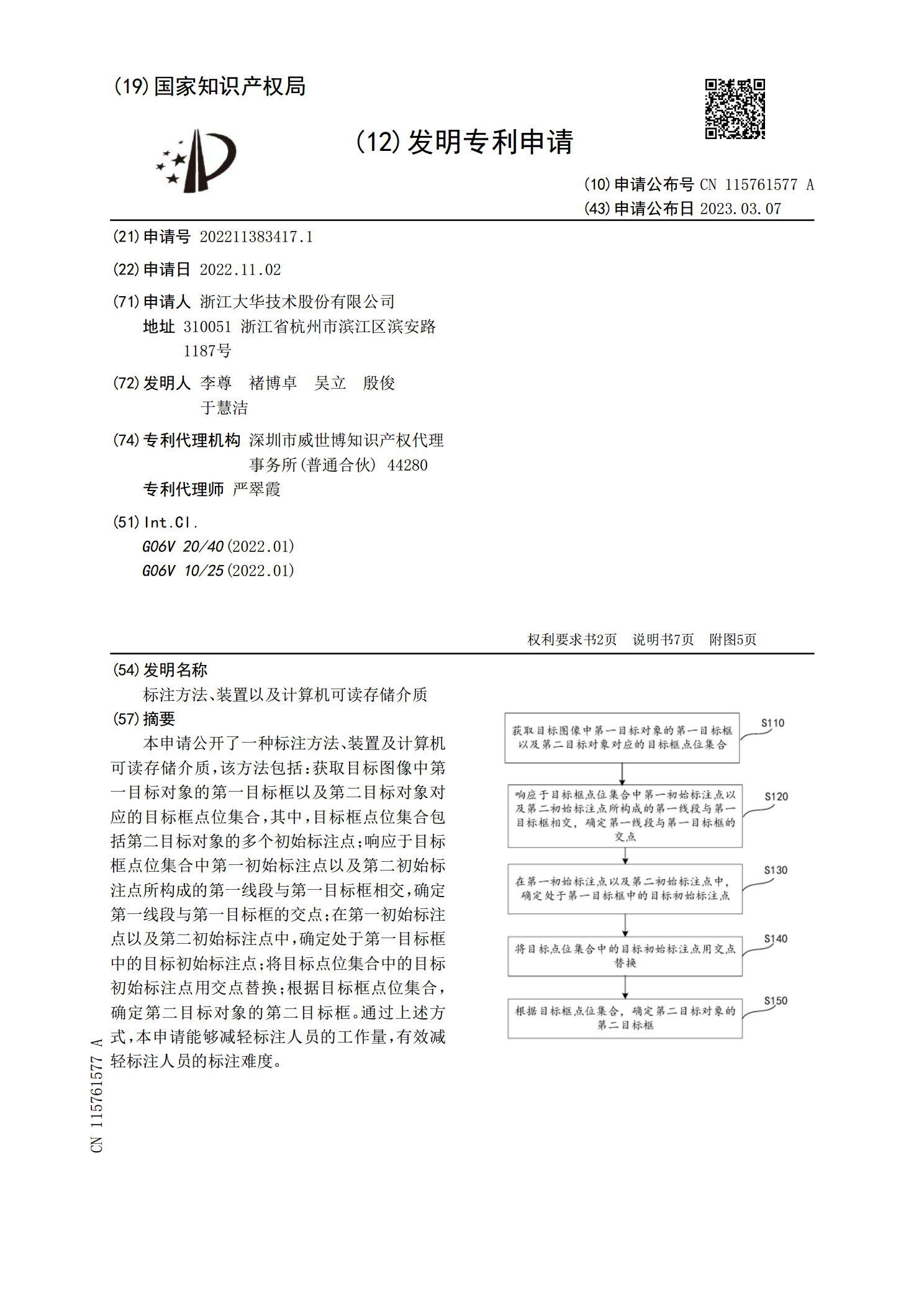
本申请公开了一种标注方法、装置及计算机可读存储介质,该方法包括:获取目标图像中第一目标对象的第一目标框以及第二目标对象对应的目标框点位集合,其中,目标框点位集合包括第二目标对象的多个初始标注点;响应于目标框点位集合中第一初始标注点以及第二初始标注点所构成的第一线段与第一目标框相交,确定第一线段与第一目标框的交点;在第一初始标注点以及第二初始标注点中,确定处于第一目标框中的目标初始标注点;将目标点位集合中的目标初始标注点用交点替换;根据目标框点位集合,确定第二目标对象的第二目标框。通过上述方式,本申请能够减