
港口集装箱自动装卸作业中的视觉识别、测距与定位方法.pdf

Jo****34

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
港口集装箱自动装卸作业中的视觉识别、测距与定位方法.pdf
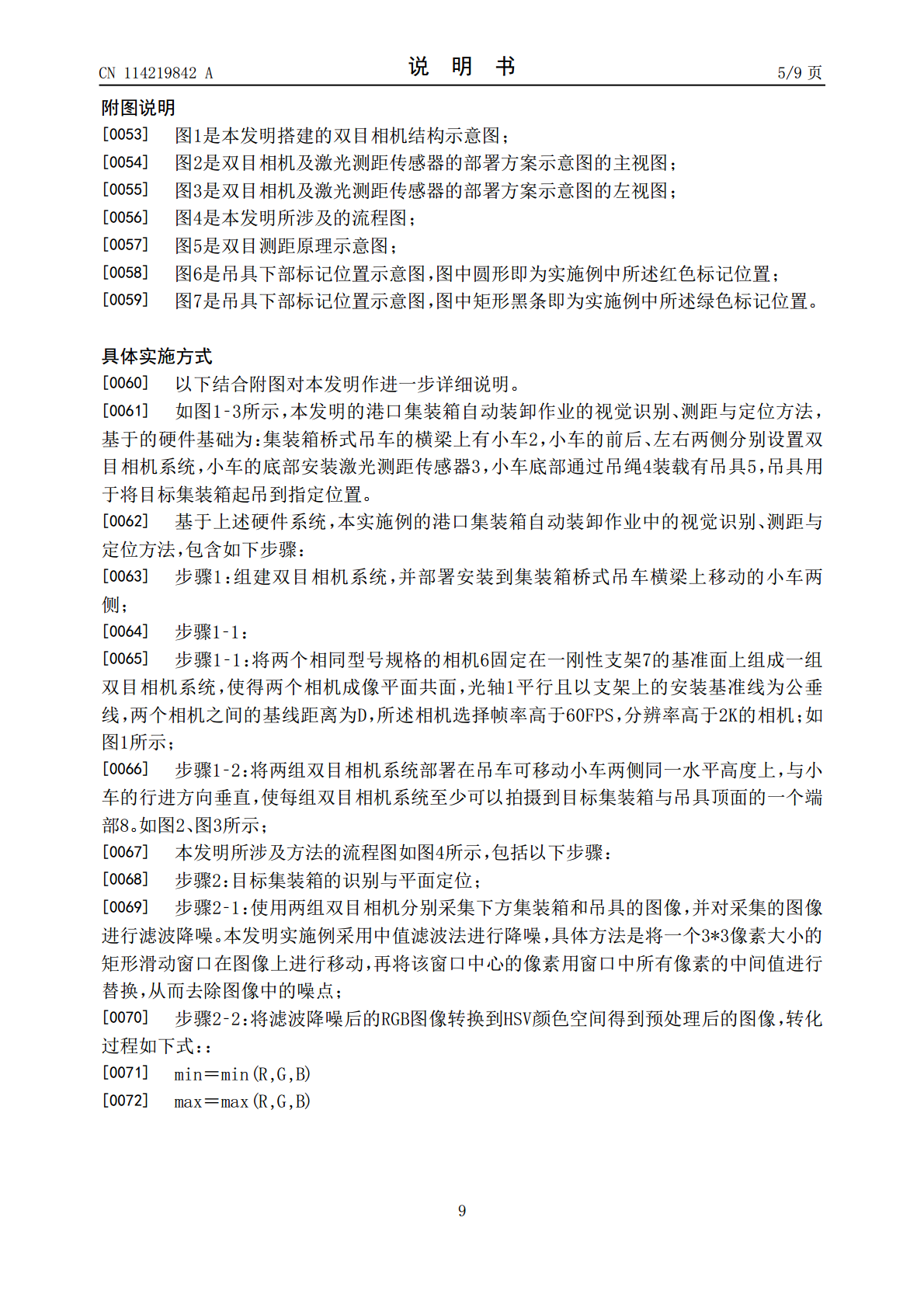
本发明提出一种港口集装箱自动装卸作业中的视觉识别、测距与定位方法,该方法包括如下步骤:步骤S1:组建双目相机系统,并部署安装到集装箱桥式吊车两端;步骤S2:对于目标集装箱进行识别与平面定位;步骤S3:得到目标集装箱的平面位置后,利用双目相机系统实现目标集装箱的初步测距,并结合目标集装箱的结构化尺寸信息实现目标集装箱高度的精确计算,通过反透视变换确定目标集装箱的空间位置坐标;步骤S4:通过对吊具上预涂装标记的识别,实现吊具的平面定位,利用单目相机或激光测距传感器,得到吊具与集装箱桥式吊车的移动小车之间的距离
港口集装箱装卸方法及系统.pdf
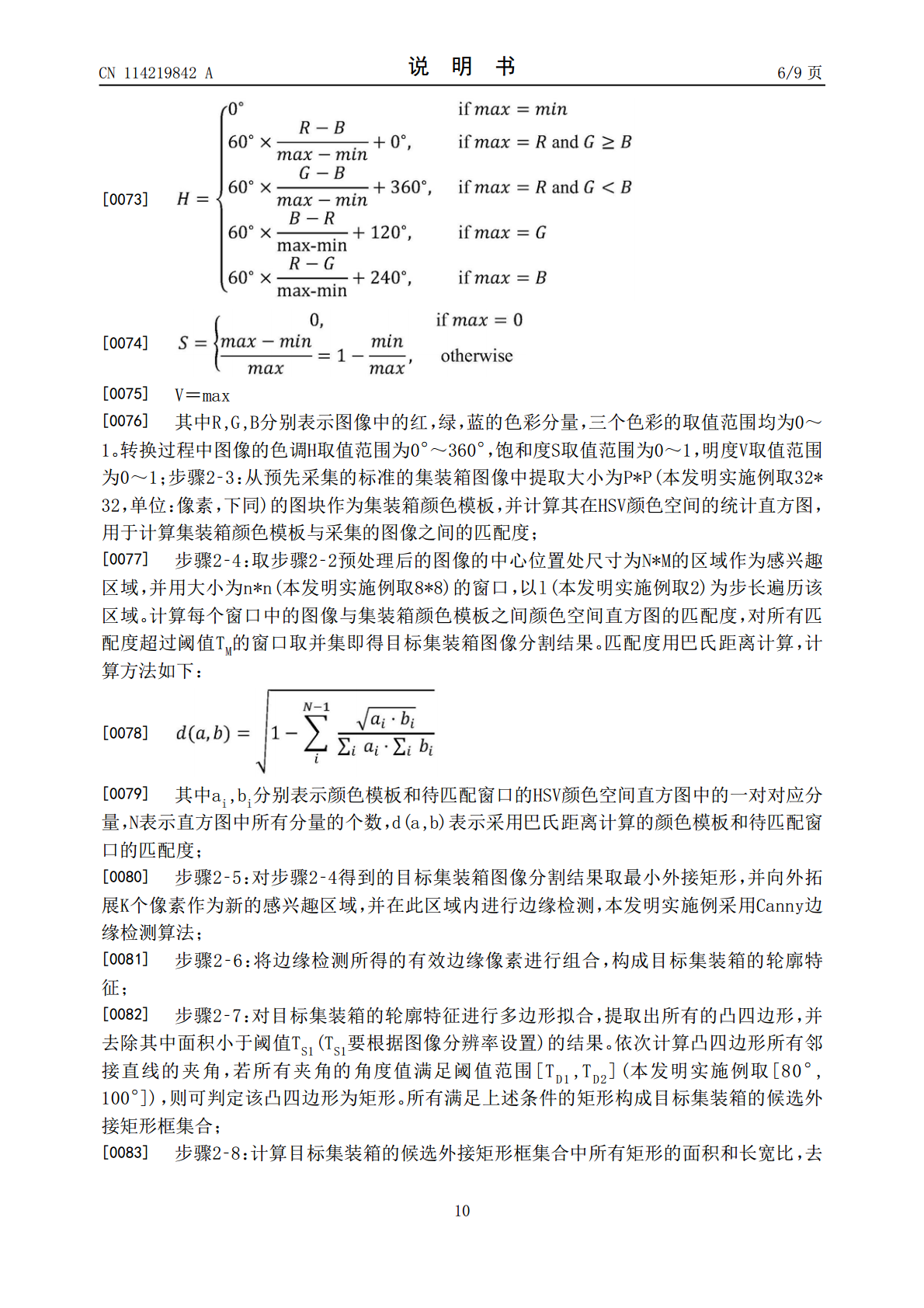
本发明公开了一种港口集装箱装卸方法及系统,涉及货运装卸,包括对通过的外集卡身份进行验证,验证通过后,允许外集卡进入调箱门,以及通知内集卡进入调箱门;获取进入场地通道的集卡车号信息;将进入场地通道的集卡车号信息与作业任务的车号信息进行比对,核对无误后,允许操作台进行装卸操作;在操作台启动工作后,获取TOS系统的作业指令;解析作业指令,按照数据库预置的分解原则,将作业指令分解为可自动化分步完成的作业任务,生成对应的作业顺序;按照作业顺序依次执行作业任务。获取TOS系统的作业指令,之后解析作业指令包含的作业任务

集装箱港口装卸作业资源配置研究.docx
集装箱港口装卸作业资源配置研究一、概述集装箱港口作为现代物流体系的重要枢纽,其装卸作业资源配置的合理性直接影响到港口的运营效率和服务质量。随着全球贸易的持续增长,集装箱吞吐量不断提升,对港口装卸作业的要求也日益严格。研究集装箱港口装卸作业资源配置问题,对于提升港口运营效率、降低运营成本、增强港口竞争力具有重要意义。本文旨在深入探讨集装箱港口装卸作业资源配置的各个方面,包括资源类型的确定、数量的计算、配置的优化以及实际应用中的挑战与对策等。通过深入分析现有文献和实践案例,结合集装箱港口的实际运营情况,本文旨
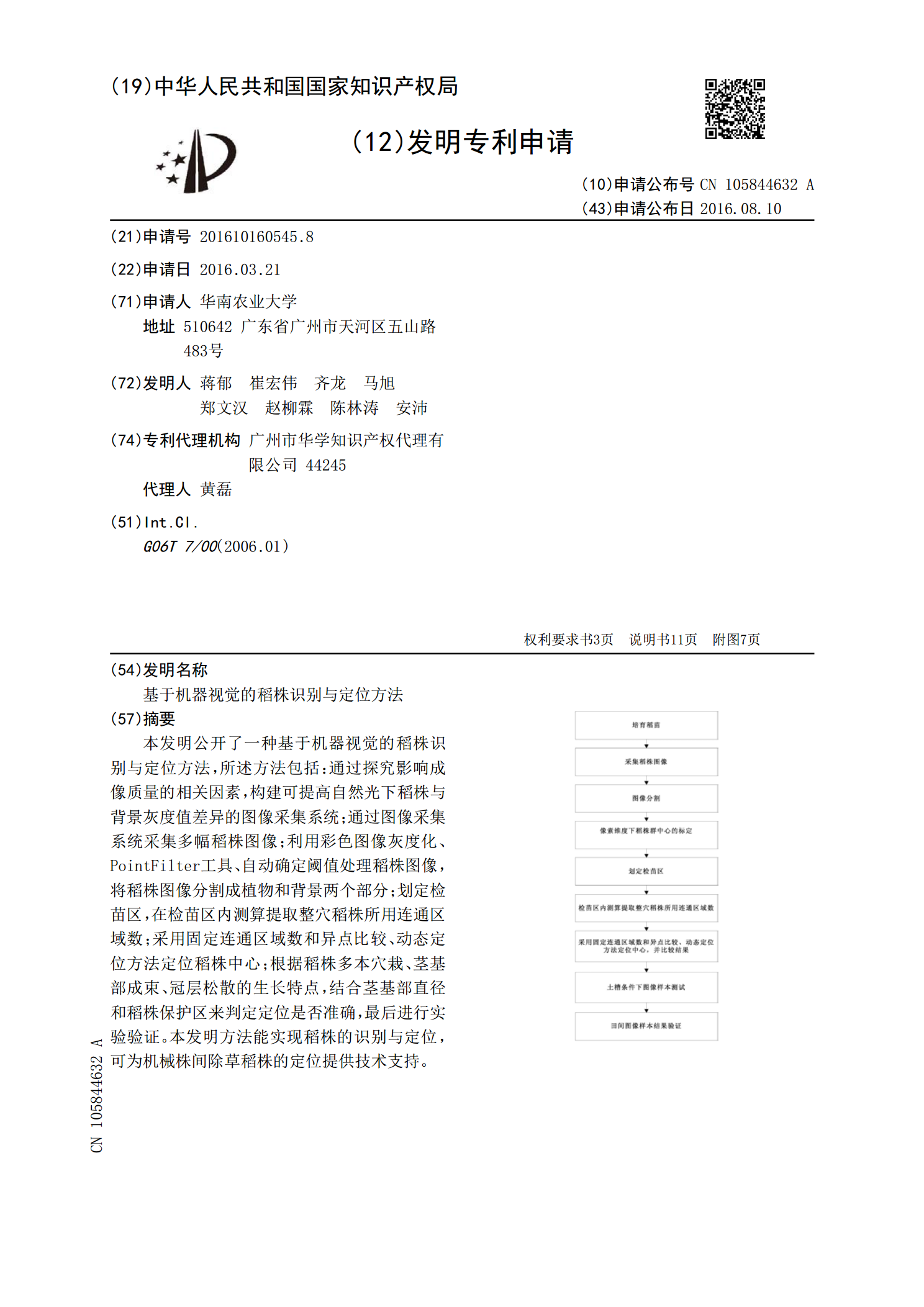
基于机器视觉的稻株识别与定位方法.pdf
本发明公开了一种基于机器视觉的稻株识别与定位方法,所述方法包括:通过探究影响成像质量的相关因素,构建可提高自然光下稻株与背景灰度值差异的图像采集系统;通过图像采集系统采集多幅稻株图像;利用彩色图像灰度化、PointFilter工具、自动确定阈值处理稻株图像,将稻株图像分割成植物和背景两个部分;划定检苗区,在检苗区内测算提取整穴稻株所用连通区域数;采用固定连通区域数和异点比较、动态定位方法定位稻株中心;根据稻株多本穴栽、茎基部成束、冠层松散的生长特点,结合茎基部直径和稻株保护区来判定定位是否准确,最后进行实
智能集装箱港口的作业方法.pdf
智能集装箱港口的作业方法,属于智能集装箱港口物流领域,针对目前集装箱港口物流现状而提供一种操作简单、快捷高效、智能化度高的集装箱港口物流方法,S1.感知层的感知设备获取轮船进港信息;S2.信息从信息发射终端经网络层的通信网络发出;S3.信息接收终端从通信网络接收消息;S4.港口现场作业的相关智能机器人信息处理中心接收第一手信息并进行初步的整理分析;效果是能够智能港口物流管理。