
穿梭车控制方法、装置、穿梭车以及存储介质.pdf

一条****发啊

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

穿梭车控制方法、装置、穿梭车以及存储介质.pdf
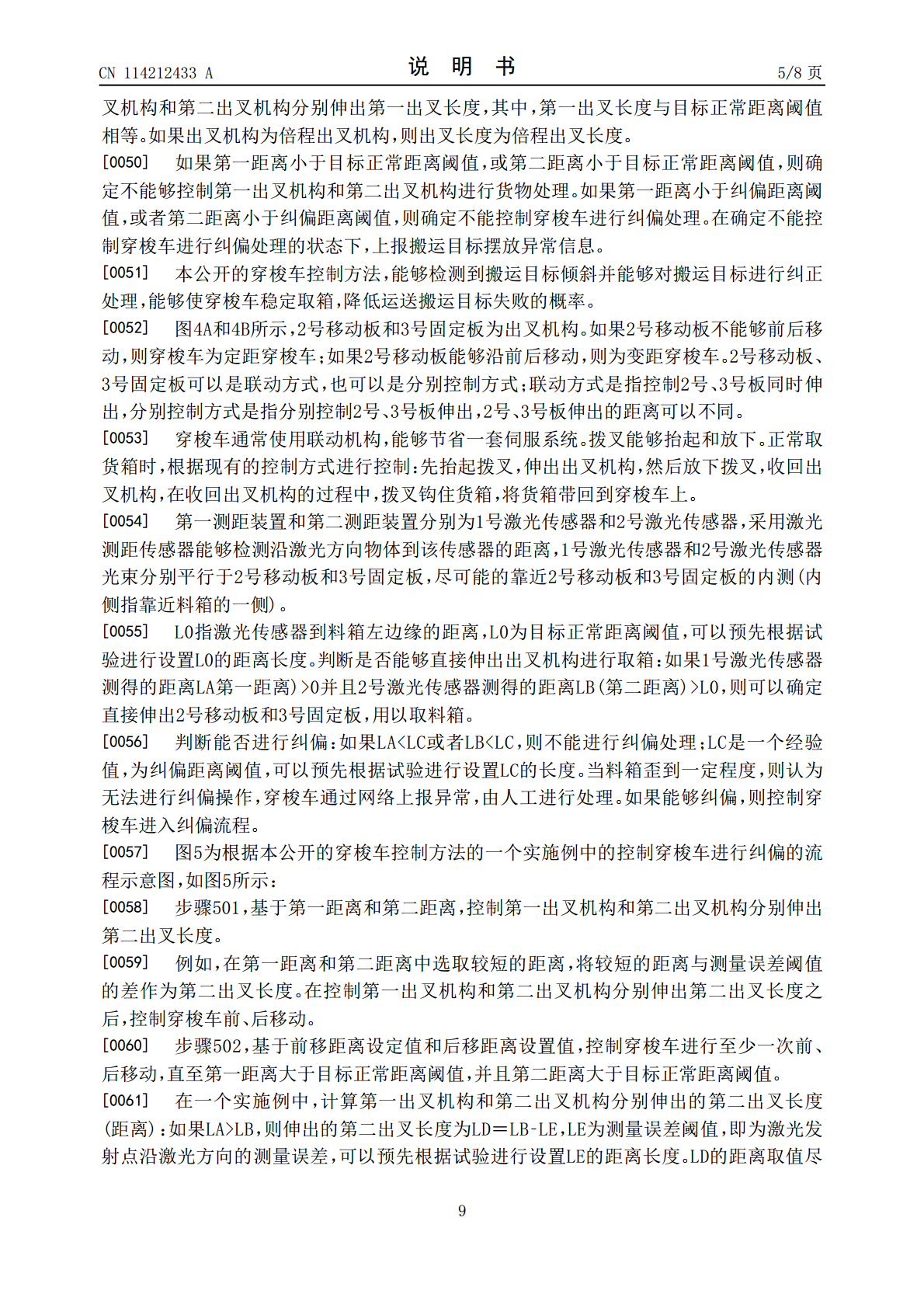
本公开提供了一种穿梭车控制方法、装置、穿梭车以及存储介质,其中的方法包括:控制第一测距装置和第二测距装置分别测量各自与搬运目标之间的第一距离和第二距离,基于第一距离和第二距离分别与目标正常距离阈值进行第一比较处理的结果确定是否能够进行货物处理;在确定不能进行货物处理的状态下,将第一距离和第二距离分别与纠偏距离阈值进行第二比较处理,基于第二比较处理结果确定是否控制穿梭车进行纠偏处理。本公开的方法、装置、穿梭车以及存储介质,能够检测到搬运目标倾斜并能够对搬运目标进行位置纠正处理,能够使穿梭车稳定取箱,降低运送
穿梭车控制装置、方法及穿梭车.pdf
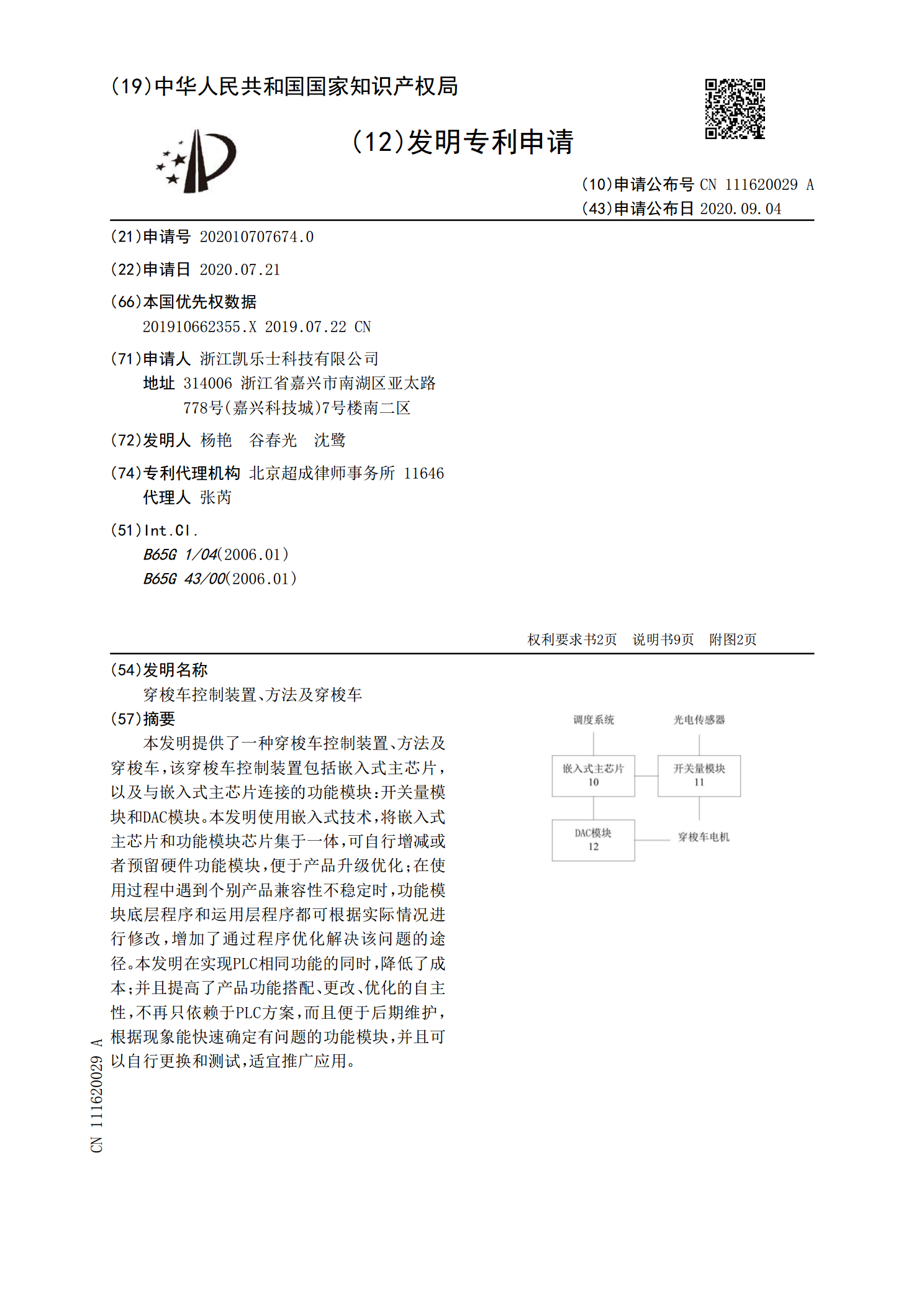
本发明提供了一种穿梭车控制装置、方法及穿梭车,该穿梭车控制装置包括嵌入式主芯片,以及与嵌入式主芯片连接的功能模块:开关量模块和DAC模块。本发明使用嵌入式技术,将嵌入式主芯片和功能模块芯片集于一体,可自行增减或者预留硬件功能模块,便于产品升级优化;在使用过程中遇到个别产品兼容性不稳定时,功能模块底层程序和运用层程序都可根据实际情况进行修改,增加了通过程序优化解决该问题的途径。本发明在实现PLC相同功能的同时,降低了成本;并且提高了产品功能搭配、更改、优化的自主性,不再只依赖于PLC方案,而且便于后期维护,

一种穿梭车控制装置、方法及穿梭车.pdf
本发明公开一种穿梭车控制装置、方法及穿梭车,该穿梭车控制装置包括无线模块、开关量模块、嵌入式主芯片、ADC模块、DAC模块、编码器以及存储器。本发明使用嵌入式技术,将嵌入式主芯片和功能模块芯片集于一体,可自行增减或者预留硬件功能模块,便于产品升级优化;在使用过程中遇到个别产品兼容性不稳定时,功能模块底层程序和运用层程序都可根据实际情况进行修改,增加了通过程序优化解决该问题的途径。本发明在实现PLC相同功能的同时,降低了成本,并且提高了产品功能搭配、更改、优化的自主性,不再只依赖于PLC方案,而且便于后期维
用于仓储系统的穿梭车、仓储系统和穿梭车的控制方法.pdf
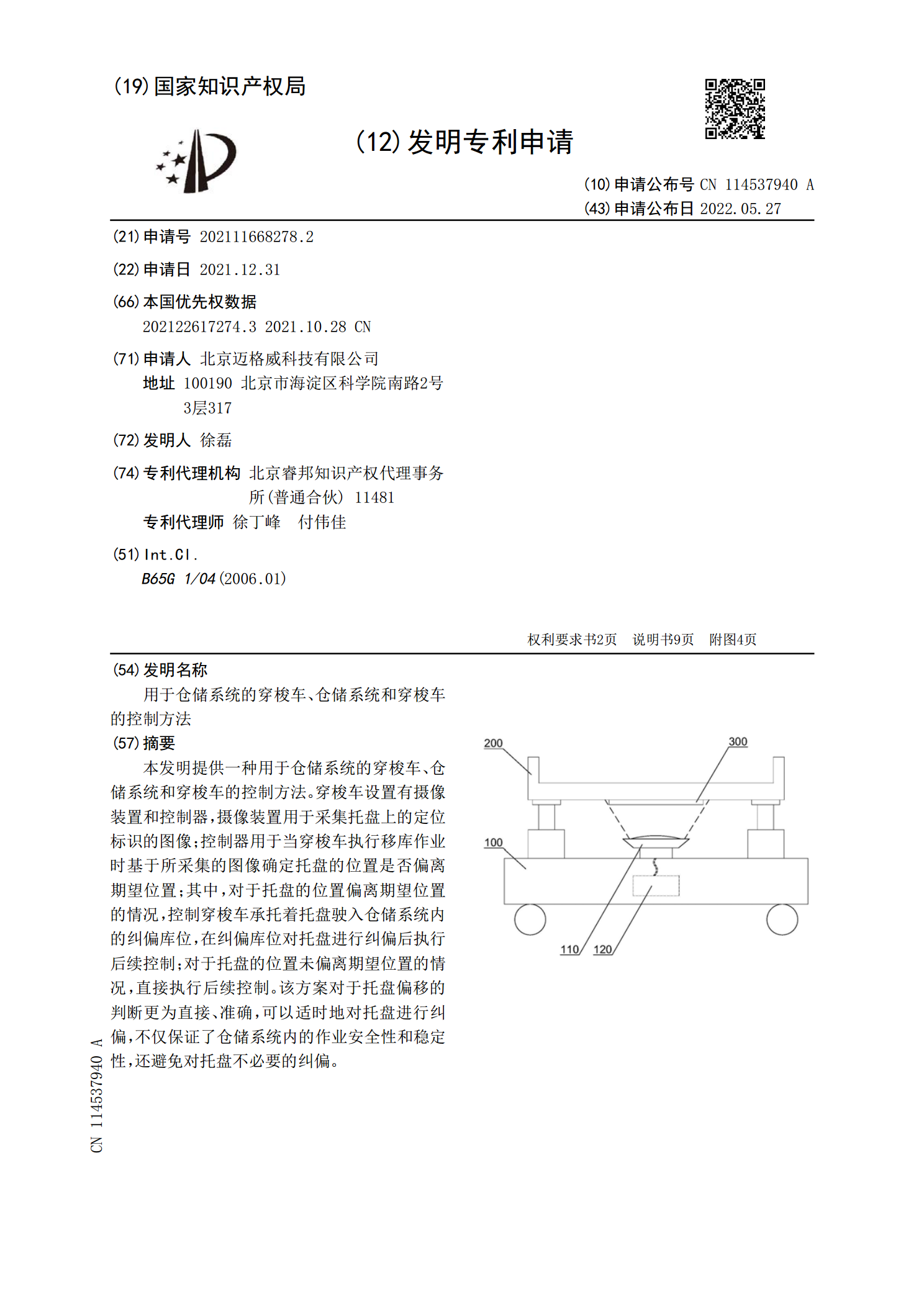
本发明提供一种用于仓储系统的穿梭车、仓储系统和穿梭车的控制方法。穿梭车设置有摄像装置和控制器,摄像装置用于采集托盘上的定位标识的图像;控制器用于当穿梭车执行移库作业时基于所采集的图像确定托盘的位置是否偏离期望位置;其中,对于托盘的位置偏离期望位置的情况,控制穿梭车承托着托盘驶入仓储系统内的纠偏库位,在纠偏库位对托盘进行纠偏后执行后续控制;对于托盘的位置未偏离期望位置的情况,直接执行后续控制。该方案对于托盘偏移的判断更为直接、准确,可以适时地对托盘进行纠偏,不仅保证了仓储系统内的作业安全性和稳定性,还避免对

穿梭车.pdf
本发明公开了一种穿梭车,包括车架、托板、升降机构、驱动机构和车轮,以使用方向为基准,托板纵向能够滑动定位于车架上方,升降机构和驱动机构固设于车架内,至少四个车轮能够转动对称定位于车架左右两相对的侧壁上,所述升降机构能够带动托板纵向运动,驱动机构能够驱动车轮转动,本发明通过驱动机构带动车轮沿货架运行,同时通过升降机构带动托板上升托起货物或者下降放下货物,其体积小,运行灵活,能大大提高空间利用率、货物存取使用效率,并且有效降低货物损坏率、货架损坏率,在人员操作方面又能放宽叉车驾驶员的驾驶技术,降低人才培养成本